[51单片机] 第八节 串口通信总结
51单片机中的自动重载概念实际上就是当计数溢出后自动赋初值
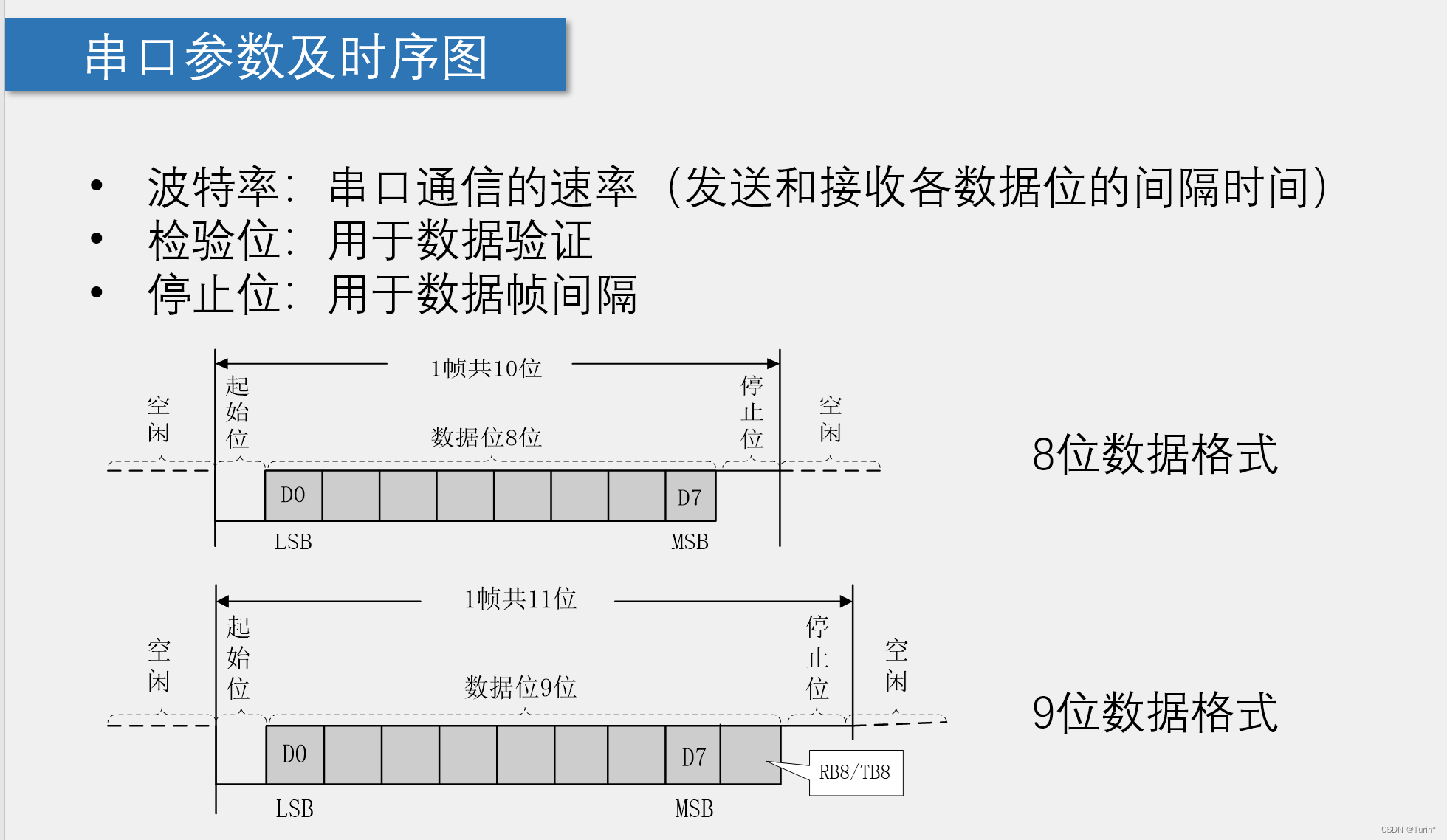
同步通信中波特率为通信双方约定好的通信速率
<前置部分>
一、串口简介:
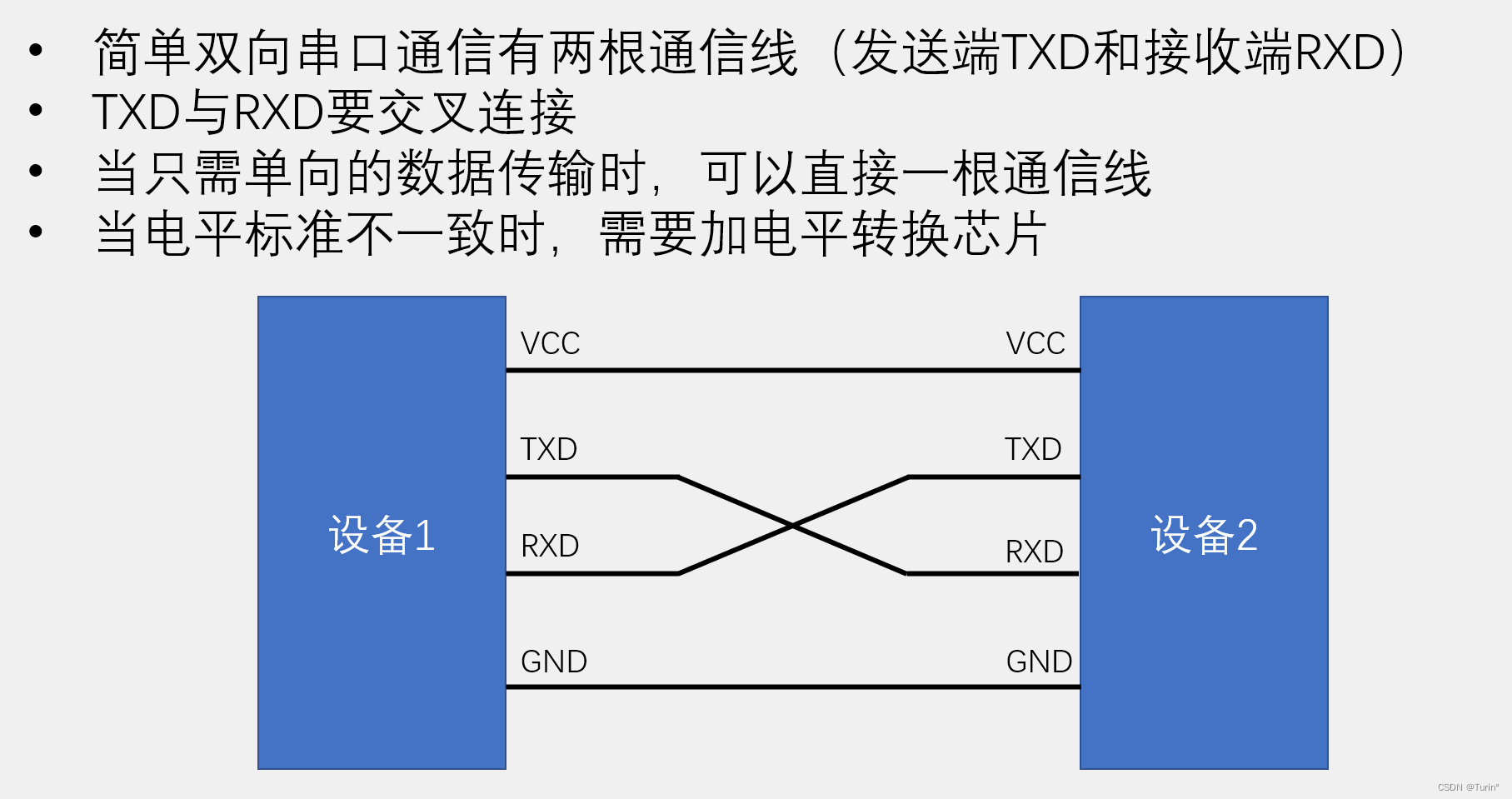
- 串口是一种应用十分广泛的通讯接口,串口成本低、容易使用、通信线路简单,可实现两个设备的互相通信。
- 单片机的串口可以使单片机与单片机、单片机与电脑、单片机与各式各样的模块互相通信,极大的扩展了单片机的应用范围,增强了单片机系统的硬件实力。
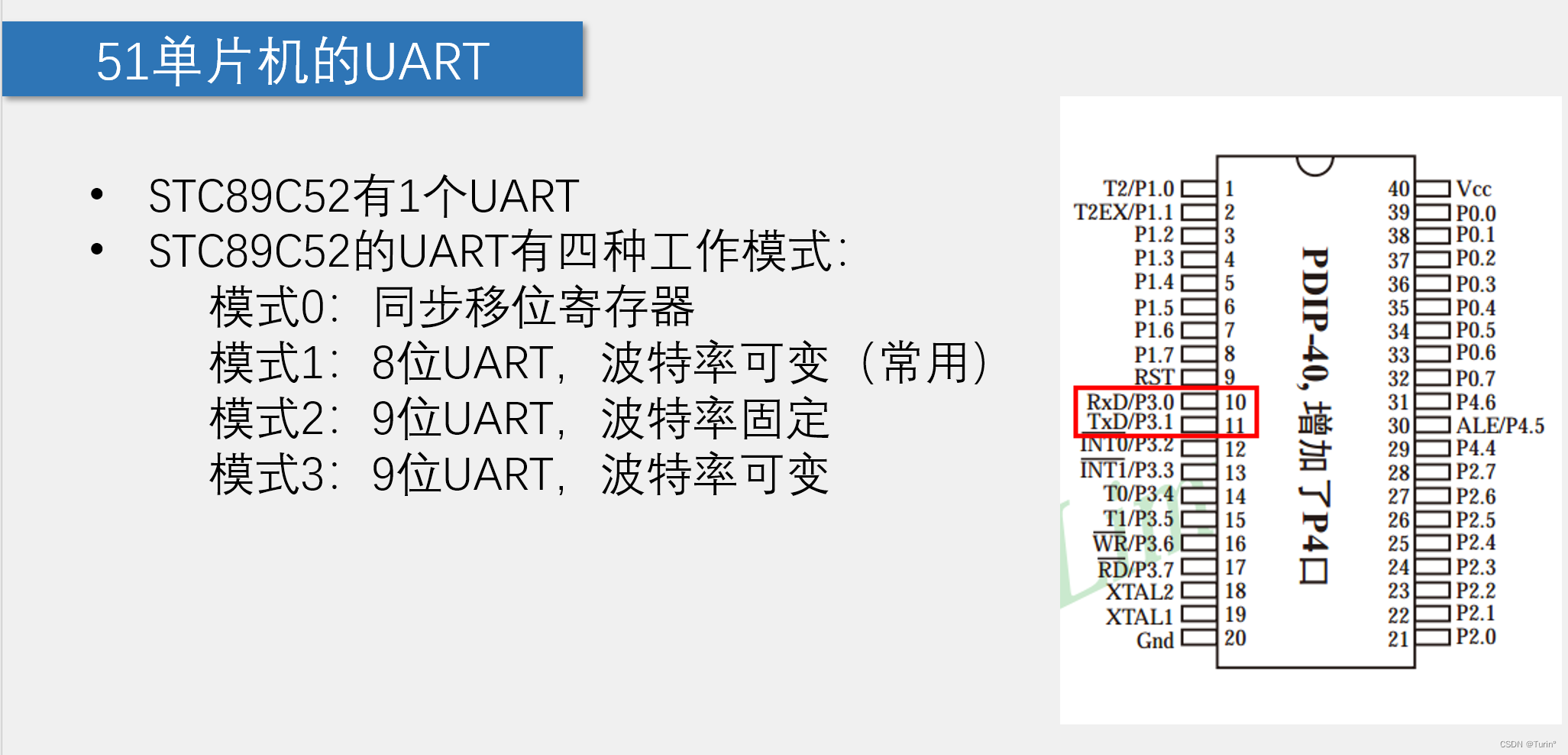
- 51单片机内部自带UART(Universal Asynchronous Receiver Transmitter,通用异步收发器),可实现单片机的串口通信。
CH340串口模块
蓝牙串口模块

二、串口通信方式:
#串口模式图:
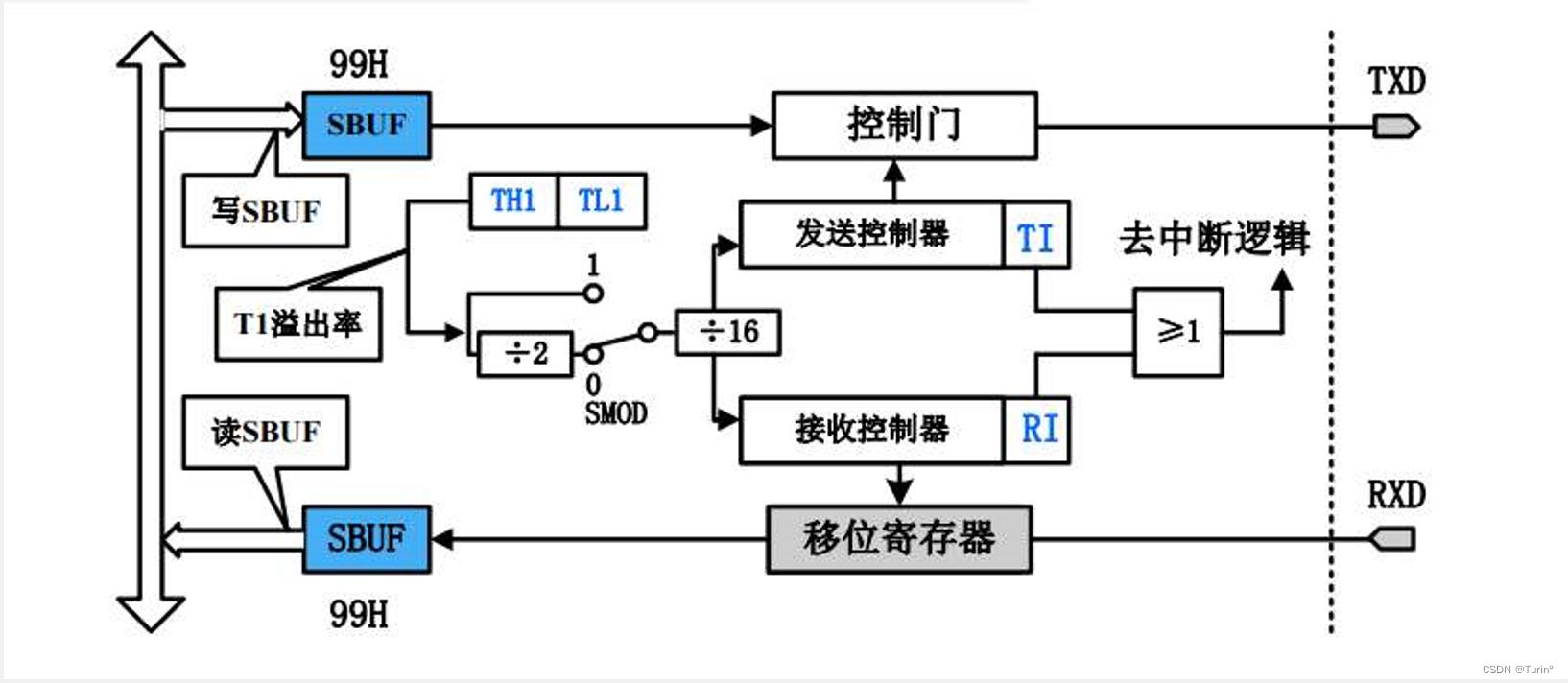
- SBUF:串口数据缓存寄存器,物理上是两个独立的寄存器,但占用相同的地址。写操作时,写入的是发送寄存器,读操作时,读出的是接收寄存器,因此要通过检测TI和RI的信号判断是发送还是接收操作。
ps:用串口端控制发送/接收时,要注意对应上HEX/文本模式
- HEX模式/十六进制模式/二进制模式:以原始数据的形式显示
- 文本模式/字符模式:以原始数据编码后的形式显示
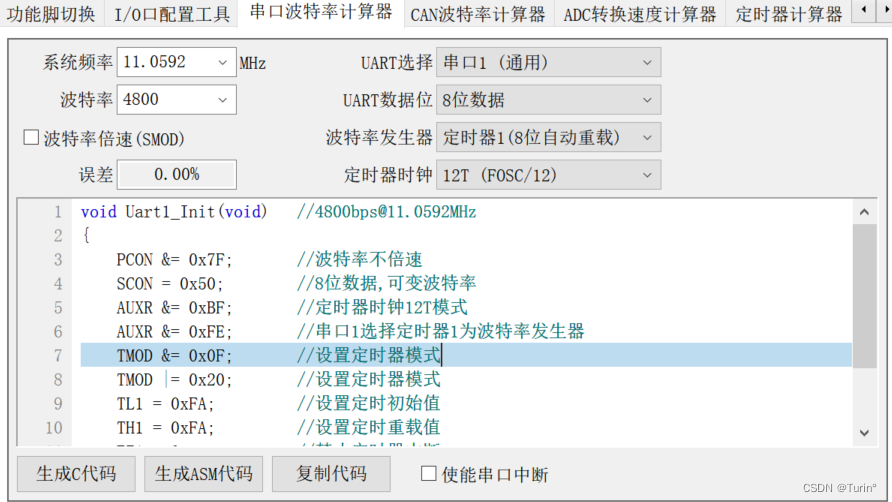
# stc-isp 串口波特率代码生成
三、串(行)口通信相关寄存器

#串口通信的寄存器解释
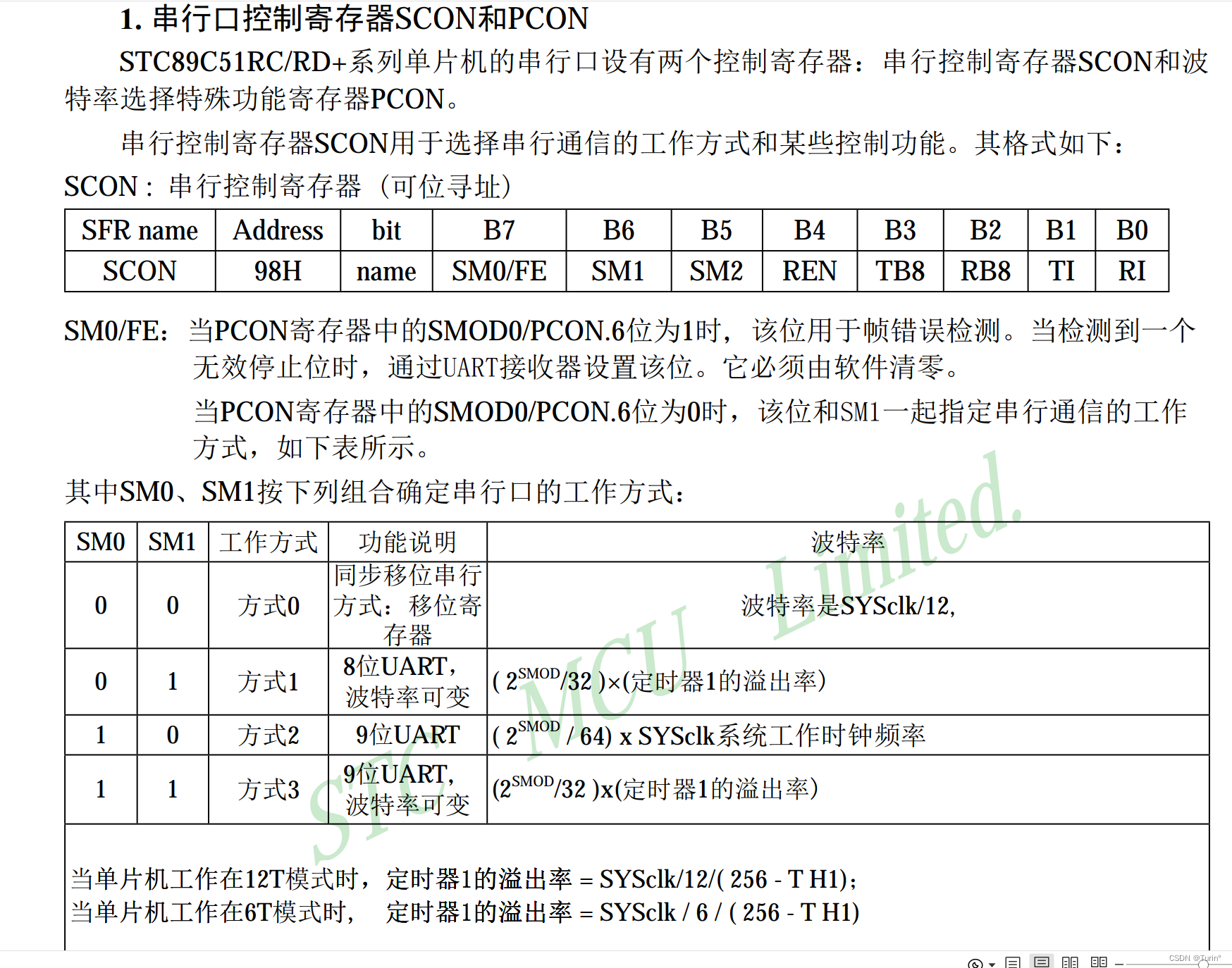
SCON:串行控制寄存器
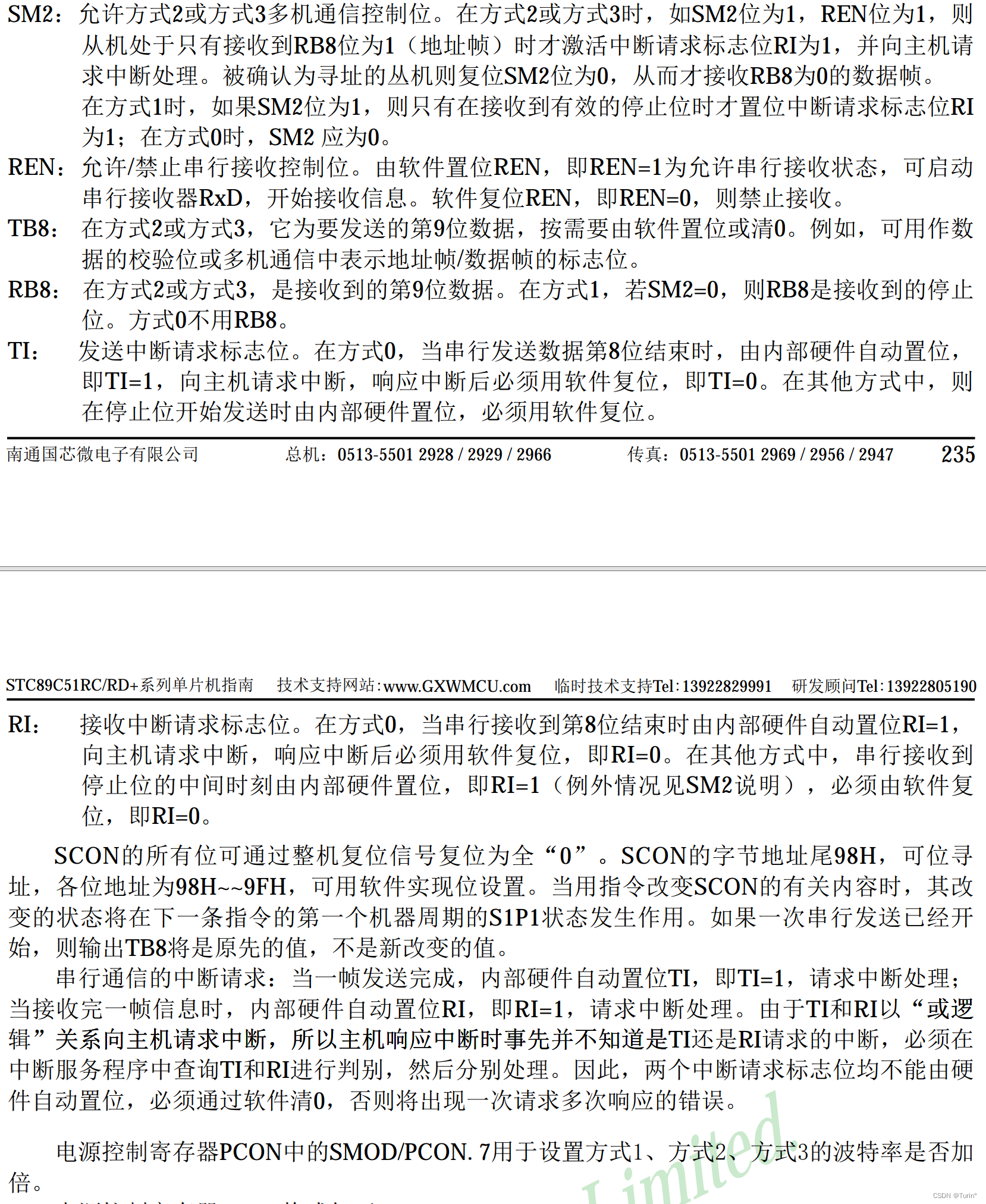
- SMO/FE:当PCON为1,FE生效,用于帧检测,当PCON为0,SM0生效,与SM1共同作用
- 这里我们选择工作方式1,SM0=0,SM1=1,SM2=0(没有用到停止位),REN=0(暂不接收数据),TB8=0,RB8=0,T1=0(方式1),RI=0(在收到一个Byte的数据时RI会自动置1);
- SCON = 0x40;
ps:主机响应中断不能判断是接收还是发送中断,必须在中断服务程序中判断TI和RI的值
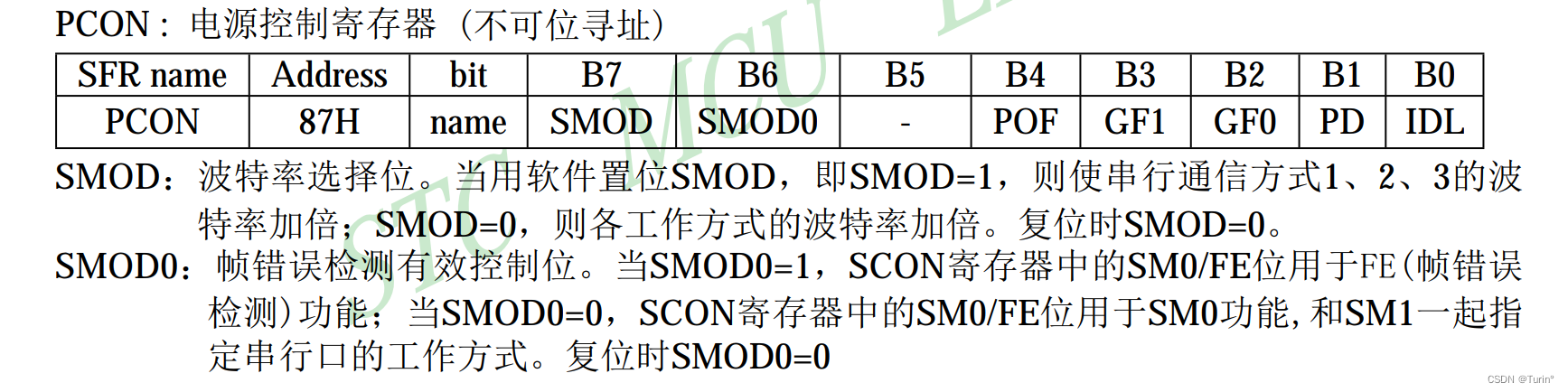
PCON:波特率选择寄存器
- 由常用串口软件如:stp-isp进行计算
SBUF:数据缓冲寄存器
- 通过程序,控制SBUF的内容,实现电脑端和单片机端的双向通信数据传输
<代码部分>
一、串口向电脑端发送数据
UART.c
#include <REGX52.H>
/**
* @brief 串口初始化,//[email protected]
* @param 无
* @retval 无
*/
void UART_Init()//串口初始化
{//波特率:通信双方约定的通信速率
SCON=0x40;
PCON &= 0x7F; //波特率不倍速
TMOD &= 0x0F; //设置定时器模式
TMOD |= 0x20; //设置定时器模式
TL1 = 0xFA; //设置定时初始值
TH1 = 0xFA; //设置定时重载值
ET1 = 0; //禁止定时器中断
TR1 = 1; //定时器1开始计时
}
/**
* @brief 串口发送一个字节数据
* @param Byte 要发送的一个字节数据
* @retval 无
*/
void UART_SendByte(unsigned char Byte)
{
SBUF=Byte;//发送缓存器中的数据为Byte
while(TI==0);//发送完数据后,电脑端接收,然后TI=1,跳过while循环
TI=0;//每次发送完数据,程序置0
}
main.c
#include <REGX52.H>
#include "Delay.h"
#include "UART.h"
unsigned char Sec;
void main()
{
UART_Init();
while(1)
{
UART_SendByte(Sec);
Sec++;
Delay(1000);
}
}
二、电脑通过串口控制LED
UART.c
#include <REGX52.H>
/**
* @brief 串口初始化,//[email protected]
* @param 无
* @retval 无
*/
void UART_Init()//串口初始化
{//波特率:通信双方约定的通信速率
SCON=0x50;
PCON &= 0x7F; //波特率不倍速
TMOD &= 0x0F; //设置定时器模式
TMOD |= 0x20; //设置定时器模式
TL1 = 0xFA; //设置定时初始值
TH1 = 0xFA; //设置定时重载值
ET1 = 0; //禁止定时器中断
TR1 = 1; //定时器1开始计时
EA=1;//启动所有中断
ES=1;//启动串口中断
}
//自动重装
/**
* @brief 串口发送一个字节数据
* @param Byte 要发送的一个字节数据
* @retval 无
*/
void UART_SendByte(unsigned char Byte)
{
SBUF=Byte;
while(TI==0);
TI=0;
}
/*串口中断函数模板
void UART_Routine() interrupt 4
{
if(RI==1)// 接收 中断
{
RI=0;
}
}
*/
main.c
#include <REGX52.H>
#include "Delay.h"
#include "UART.h"
void main()
{
UART_Init();
while(1)
{
}
}
//
void UART_Routine() interrupt 4 //带上interrupt 4表示UART_Routine()为中断服务子函数
{
if(RI==1)// 接收 中断
{
P2=~SBUF;
UART_SendByte(SBUF);//这里,单片机接收电脑端发送的数据,一个函数不能既在主函数里出现,也在中断中出现
RI=0;//程序置0
}
}
总结:UART:同步双向,即向电脑端发送数据,也可接收电脑端发送的数据,通过内部程序执行相应的任务