从这一讲开始我们要开始学习SLAM的后端,前面我们学习了视觉里程计(VO),通过视觉里程计,我们可以构建一个短时间内效果还不错的轨迹和地图,但是长时间的误差的累计,还是会迅速的降低我们的轨迹和地图的精度,所以维护一个更大的地图和轨迹,使其达到最优状态,在实际中还是非常需要的。而这项任务的完成就离不开——后端。
概述
状态估计和概率解释
我们再来看一下SLAM过程的运动方程和观测方程:
{
x
k
=
f
(
x
k
−
1
,
u
k
)
+
w
k
(
运
动
方
程
)
z
k
=
h
(
x
k
)
+
v
k
,
k
=
1
,
…
,
N
(
观
测
方
程
)
(0)
\left\{ \begin{aligned} &x_k = f(x_{k-1},u_k)+w_k (运动方程)\\ &z_{k}=h(x_k)+v_{k} ,k=1,\dots,N(观测方程) \end{aligned} \right. \tag 0
{xk=f(xk−1,uk)+wk (运动方程)zk=h(xk)+vk,k=1,…,N(观测方程)(0)这两个方程我们已经多次见过了,依然有必要再仔细看看它:
系统状态:
x
x
x
输入:
u
u
u(也可以理解为控制量,这里和书中的说法不一样!!)
过程噪声:
w
w
w
测量:
z
z
z
测量噪声:
v
v
v
我们不妨通过描述的方法去认识一下(0)式:
首先看运动方程:
k
k
k时刻的系统状态
x
k
x_k
xk,是由
k
−
1
k-1
k−1时刻的状态
x
k
−
1
x_{k-1}
xk−1,
k
k
k时刻的控制量
u
k
u_k
uk,再加上过程噪声共同决定的。
测量方程:
z
k
z_{k}
zk时刻的测量值,是由在
x
k
x_k
xk状态下看到的观测,在加上测量噪声决定的。
这个式子是一个很抽象的式子,它表示了一大类运动过程,如果不根据实际的情况分析,可能你不太能明白这其中的具体过程。
现在我们想获得
k
k
k时刻的系统状态分布,我们希望这个分布是从过去0到
k
k
k中的所有数据估计而来的:
P
(
x
k
∣
x
0
,
u
1
:
k
,
z
1
:
k
)
P(x_k |x_0, u_{1:k},z_{1:k})
P(xk∣x0,u1:k,z1:k)注意从0到
k
k
k时刻,我们能得到的数据就是0时刻的系统状态
x
0
x_0
x0、控制量
u
u
u,测量值
z
z
z。
根据贝叶斯公式:
P
(
x
k
∣
x
0
,
u
1
:
k
,
z
1
:
k
)
∝
P
(
z
k
∣
x
k
)
P
(
x
k
∣
x
0
,
u
1
:
k
,
z
1
:
k
−
1
)
(1)
P(x_k |x_0, u_{1:k},z_{1:k}) \propto P(z_k|x_k)P(x_k|x_0,u_{1:k},z_{1:k-1}) \tag 1
P(xk∣x0,u1:k,z1:k)∝P(zk∣xk)P(xk∣x0,u1:k,z1:k−1)(1)对于上式不用过多解释了,非常简单的贝叶斯公式。
P
(
z
k
∣
x
k
)
P(z_k|x_k)
P(zk∣xk)是似然,也就是
x
k
x_k
xk条件下,
z
k
z_k
zk的概率分布,对应到SAMM问题中,也就是某一个状态下的测量值,这个可以通过测量方程给出。
P
(
x
k
∣
x
0
,
u
1
:
k
,
z
1
:
k
−
1
)
P(x_k|x_0,u_{1:k},z_{1:k-1})
P(xk∣x0,u1:k,z1:k−1)是先验,它的求法和我们选取什么样的状态有关,可以选择上一个时刻的状态,也可以选取以前所有的状态。如果按照
x
k
−
1
x_{k-1}
xk−1时刻的状态为条件:
P
(
x
k
∣
x
0
,
u
1
:
k
,
z
1
:
k
−
1
)
=
∫
P
(
x
k
∣
x
k
−
1
,
x
0
,
u
1
:
k
,
z
1
:
k
−
1
)
P
(
x
k
−
1
∣
x
0
,
u
1
:
k
,
z
1
:
k
−
1
)
d
x
k
−
1
(2)
P(x_k|x_0,u_{1:k},z_{1:k-1}) = \int P(x_k|x_{k-1},x_0,u_{1:k},z_{1:k-1}) P(x_{k-1}|x_0,u_{1:k},z_{1:k-1}) dx_{k-1} \tag 2
P(xk∣x0,u1:k,z1:k−1)=∫P(xk∣xk−1,x0,u1:k,z1:k−1)P(xk−1∣x0,u1:k,z1:k−1)dxk−1(2)上式子(2)的操作方法很多,选择不同的操作,就对应着不同的理论,如果认为只和上一时刻有关,那么就会得到以卡尔曼滤波器为代表的滤波器方法。如果认为和所有状态都有关,那么得到的就是非线性优化的方法。
线性系统和KF
首先我们看一下认为只和上一个时刻有关的马儿可夫理论,也就是基于滤波器模型。
在这里由于推导过程比较复杂(如果你觉得推导看着费劲,那就先记住结论吧),所以我就直接总结出线性卡尔曼滤波器的公式:
①预测:
x
‾
k
=
A
k
x
^
k
−
1
+
u
k
,
P
‾
k
=
A
k
P
^
k
−
1
A
k
T
+
R
(3)
\overline x_k = A_k \hat x_{k-1} + u_k, \overline P_k=A_k \hat P_{k-1}A_k^{T}+R \tag 3
xk=Akx^k−1+uk, Pk=AkP^k−1AkT+R(3) ②更新:先计算卡尔曼增益
K
K
K
K
k
=
P
‾
k
C
k
T
(
C
k
P
‾
k
C
k
T
+
Q
k
)
−
1
(4)
K_k=\overline P_kC_k^{T}(C_k \overline P_kC_k^{T}+Q_k)^{-1} \tag 4
Kk=PkCkT(CkPkCkT+Qk)−1(4) 然后计算后验概率分布
x
^
k
=
x
‾
k
+
K
k
(
z
k
−
C
k
x
‾
k
)
(5)
\hat x_k = \overline x_k + K_k(z_k-C_k \overline x_k) \tag 5
x^k=xk+Kk(zk−Ckxk)(5)
P
^
k
=
(
I
−
K
k
C
k
)
P
‾
k
\hat P_k = (I-K_kC_k) \overline P_k
P^k=(I−KkCk)Pk(3)(4)(5)就是伟大的卡尔曼滤波器公式,你不要小瞧它,它的用处远比你想象的还要大,你可以不会推导,但是一定要学会怎么使用,这一点非常重要,因为它的用处实在太大了!!让我们看一下每一个变量的意义吧:
状态转移矩阵:
A
A
A
过程噪声:
u
u
u
过程噪声的协方差矩阵:
Q
Q
Q
观测矩阵:
C
C
C
观测噪声协方差:
R
R
R
卡尔曼滤波器的更直白的描述是:现在我们有一个当前时刻的测量值,和当前状态的预测值,我们觉得两个值都不是最准确的,但是我们不能丢弃任何一个,而是通过对这两个值取一个折中值(不是平均值,不然也太low了),将这个折中值就作为当前状态的最优估计。(4)式的卡尔曼增益,就是告诉我们了,应该相信测量值更多一点儿,还是应该相信预测值更多一点儿。
关于卡尔曼滤波器更细致的理解和使用方法,我推荐大家看以下博客
《详解卡尔曼滤波原理》
《卡尔曼滤波应用及其matlab实现》
非线性系统和EKF
上面讲的是线性的系统,对于(0)式这样的非线性的系统,我们可以将其通过泰勒展开保留一阶项,也就可以将非线性系统线性化,然后同样的思路推导出扩展卡尔曼方程:
①预测:
x
‾
k
=
f
(
x
^
k
−
1
,
u
k
)
,
P
‾
k
=
F
P
^
k
−
1
F
T
+
R
k
(6)
\overline x_k = f(\hat x_{k-1},u_k), \overline P_k=F\hat P_{k-1}F^{T} +R_k \tag 6
xk=f(x^k−1,uk), Pk=FP^k−1FT+Rk(6) ②更新:先计算卡尔曼增益
K
K
K:
K
k
=
P
‾
k
H
T
(
H
P
‾
k
H
T
+
Q
k
)
−
1
(7)
K_k=\overline P_kH^{T}(H \overline P_kH^{T}+Q_k)^{-1} \tag 7
Kk=PkHT(HPkHT+Qk)−1(7) 然后计算后验概率分布
x
^
k
=
x
‾
k
+
K
k
(
z
k
−
h
(
x
‾
k
)
)
(8)
\hat x_k = \overline x_k + K_k(z_k-h(\overline x_k)) \tag 8
x^k=xk+Kk(zk−h(xk))(8)
P
^
k
=
(
I
−
K
k
H
)
P
‾
k
\hat P_k = (I-K_kH) \overline P_k
P^k=(I−KkH)Pk
其中
F
F
F是
f
(
x
)
f(x)
f(x)关于
x
x
x的偏导数,
H
H
H是
h
(
x
)
h(x)
h(x)关于
x
x
x的偏导数。
EKF的讨论
KF也好,EKF也好,总之基于卡尔曼滤波器发展起来的各种滤波器种类繁多,在不同的应用方向上发挥着巨大的作用。不管现今的SLAM是否还在使用滤波器,但是对于计算资源受限的硬件来说,选择卡尔曼滤波器是不错的选择。
随着计算机硬件的提升,主流的SLAM系统基本都已经摒弃了基于滤波的方法。主要原因是因为以下方面:
- 1.滤波器的方法是基于前后两个时刻的状态进行计算的,实际上我们知道,我们当前的状态不是任何一个状态导致的,而是很多状态累积出来的结果,如果只认为与前一状态有关,势必会丢掉很多有用的信息。
- 2.EKF在非线性强烈的情况下,线性近似就不在成立,导致误差会很大。
- 3.EKF需要存储的信息量很多,不能适应大型场景。
BA和图优化
既然基于滤波器的方法不能适应现在的需求,那么我们就能来看看更好的方法。
关于BA我在第7讲的视觉里程计中给了一个还算直观的解释,在这里我就不在赘述了。
投影模型和BA代价函数
1.首先将一个世界坐标下的空间点
p
p
p转换到相机坐标下:
P
′
=
R
p
+
t
=
[
X
′
,
Y
′
,
Z
′
]
T
P'=Rp+t=[X',Y',Z']^{T}
P′=Rp+t=[X′,Y′,Z′]T2.然后
P
′
P'
P′投影到归一化平面,得到归一化坐标:
P
c
=
[
u
c
,
v
c
,
1
]
T
=
[
X
′
Z
′
,
Y
′
Z
′
,
1
]
T
P_c=[u_c,v_c,1]^{T}=[\frac{X'}{Z'},\frac{Y'}{Z'},1]^{T}
Pc=[uc,vc,1]T=[Z′X′,Z′Y′,1]T
3.考虑归一化坐标的畸变情况,得到去畸变(只考虑径向畸变)后的归一化坐标:
{
u
c
′
=
u
c
(
1
+
k
1
r
c
2
+
k
2
r
c
4
)
v
c
′
=
v
c
(
1
+
k
1
r
c
2
+
k
2
r
c
4
)
\left\{ \begin{aligned} u_c'=u_c(1+k_1r_c^{2}+k_2r_c^4) \\ v_c'=v_c(1+k_1r_c^2+k_2r_c^4) \end{aligned} \right.
{uc′=uc(1+k1rc2+k2rc4)vc′=vc(1+k1rc2+k2rc4)
4.最后根据相机内参模型,将去畸变后归一化平面的点投影到像素平面:
{
u
s
=
f
x
u
c
′
+
c
x
v
s
=
f
y
v
c
′
+
c
y
\left\{ \begin{aligned} u_s=f_xu_c'+c_x \\ v_s=f_yv_c'+c_y \end{aligned} \right.
{us=fxuc′+cxvs=fyvc′+cy
上面四步也就是前面讲的观测方程,在前面我们的观测方程被抽象成了:
z
=
h
(
x
,
y
)
z=h(x,y)
z=h(x,y)那么
x
x
x就相当于是这里的相机外参数
R
,
t
R,t
R,t,对应的李代数为
ξ
\xi
ξ,
y
y
y就相当于是这里的三维点
p
p
p,
z
z
z就是这里的观测数据
[
u
s
,
v
s
]
[u_s,v_s]
[us,vs]。那么观测误差就是:
e
=
z
−
h
(
ξ
,
p
)
(9)
e = z-h(\xi,p) \tag 9
e=z−h(ξ,p)(9)很多人不明白这个式子,在这里我解释一下:空间中的点已经投影到了像素平面上,这个已经是一个事实了,谁也改变不了了。现在我们有一个相机姿态
ξ
\xi
ξ和空间点位置的不准确值,按说如果我们的
ξ
,
p
\xi,p
ξ,p完全准确的话(9)式就会严格成立,
e
=
0
e=0
e=0。但是实际上算出来的
ξ
,
p
\xi,p
ξ,p并不准,所以我们按照这两个不准确的值进行投影的时候得到的值,和我实际测量的像素值就会有差异,上面的(9)式没有体现出这样的逻辑关系,如果你还是不懂的话,请你停下来再仔细整理一下思路!!
我们将所有的误差叠加到一起,具体说就是所有位姿下观测到的所有路标点,然后写成最小二乘的形式:
1
2
∑
i
=
1
m
∑
j
=
1
n
∥
e
i
j
∥
2
=
1
2
∑
i
=
1
m
∑
j
=
1
n
∥
z
i
j
−
h
(
ξ
i
,
p
j
)
∥
2
(10)
\frac{1}{2} \sum_{i=1}^{m} \sum_{j=1}^{n}\| e_{ij} \|^2 = \frac{1}{2} \sum_{i=1}^{m} \sum_{j=1}^{n}\| z_{ij}-h(\xi_i,p_j) \|^2 \tag{10}
21i=1∑mj=1∑n∥eij∥2=21i=1∑mj=1∑n∥zij−h(ξi,pj)∥2(10)上式的
z
i
j
z_{ij}
zij表示的是在
ξ
i
\xi_i
ξi处观察到的路标点
p
j
p_j
pj.
BA优化最终做的就是优化上面这个式子的位姿和路标点,使得整体误差最小。我不知道你是否清楚这个过程,我还是愿意多费几句口舌跟你重复一下这个过程:对于优化上式获得误差和最小时的位姿和路标点,其实就是在不断地寻找每一个位姿、每一个路标点的值,让它不断地接近误差和最小。
至于怎么去寻找,下面我们就讲讲BA的求解
BA的求解
(10)中待优化的变量是位姿和路标,我们将它们写在一起,组成一个整体的待优化变量:
x
=
[
ξ
1
,
ξ
2
,
⋯
,
ξ
m
,
p
1
,
p
2
,
⋯
,
p
n
]
T
x=[\xi_1,\xi_2,\cdots,\xi_m,p_1,p_2,\cdots,p_n]^{T}
x=[ξ1,ξ2,⋯,ξm,p1,p2,⋯,pn]T相应的,(10)式可以简化为下式:
1
2
∥
f
(
x
)
∥
2
=
1
2
∑
i
=
1
m
∑
j
=
1
n
∥
z
i
j
−
h
(
ξ
i
,
p
j
)
∥
2
(11)
\frac{1}{2} \| f(x)\|^2 = \frac{1}{2} \sum_{i=1}^{m} \sum_{j=1}^{n}\| z_{ij}-h(\xi_i,p_j) \|^2 \tag{11}
21∥f(x)∥2=21i=1∑mj=1∑n∥zij−h(ξi,pj)∥2(11)那么对(11)进行泰勒展开,保留一阶项:
1
2
∥
f
(
x
)
∥
2
≈
1
2
∑
i
=
1
m
∑
j
=
1
n
∥
e
i
j
+
F
i
j
Δ
ξ
i
+
E
i
j
Δ
p
j
∥
2
(12)
\frac{1}{2} \| f(x)\|^2 \approx \frac{1}{2} \sum_{i=1}^{m} \sum_{j=1}^{n}\| e_{ij}+F_{ij}\Delta\xi_i+E_{ij}\Delta p_j\|^2 \tag{12}
21∥f(x)∥2≈21i=1∑mj=1∑n∥eij+FijΔξi+EijΔpj∥2(12)其中
F
i
j
,
E
i
j
F_{ij},E_{ij}
Fij,Eij分别是代价函数对相机姿态和路标点的偏导数.
将(12)式右边写成向量的形式:
1
2
∥
f
(
x
)
∥
2
≈
1
2
∥
e
+
F
Δ
x
c
+
E
Δ
x
p
∥
2
(12)
\frac{1}{2} \| f(x)\|^2 \approx \frac{1}{2}\| e+F\Delta x_c+E\Delta x_p\|^2 \tag{12}
21∥f(x)∥2≈21∥e+FΔxc+EΔxp∥2(12)实际上,上面的步骤不知道你注意到没有,我们已经由整体的代价函数,变成了在代价函数某一点处进行一阶近似了,希望你别迷糊了。
对于(12)式的优化,不论是GN还是LM方法,它们的雅克比矩阵可以写成如下形式:
J
=
[
F
E
]
J=[F E]
J=[F E]海森矩阵可以写成:
H
=
J
T
J
=
[
F
T
F
F
T
E
E
T
F
E
T
E
]
(13)
H=J^TJ= \left[ \begin{matrix} F^TF&F^TE \\ E^TF&E^TE \end{matrix} \right] \tag {13}
H=JTJ=[FTFETFFTEETE](13)
如果你还记得非线性优化那一讲的内容,那么你应该知道对于非线性优化增量的线性方程:
H
Δ
x
=
g
H \Delta x = g
HΔx=g我们要想解出
Δ
x
\Delta x
Δx,就得对
H
H
H矩阵求逆,实际上是一个非常大的矩阵,因为包含了数百个位姿,几十上百万的路标点,所以对于它的求逆能不能实时就决定了,SLAM整个系统能不能实时运行,这一块之前的研究者研究了很多,才找到了
H
H
H的特别之处。
H
H
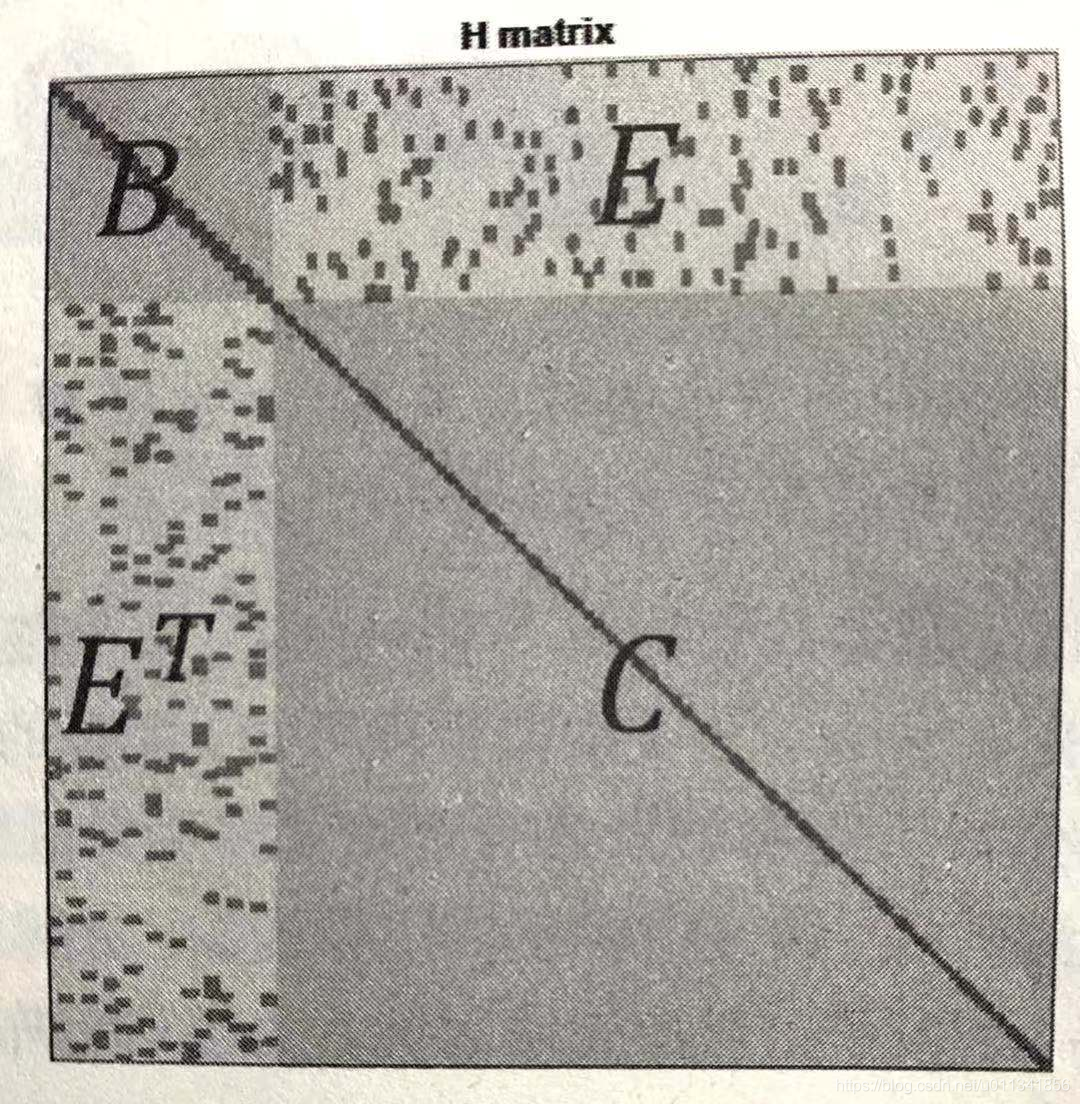
H矩阵的特别之处在于,它是稀疏的!!这一点很重要!我们来看一个特别大型的实际例子下
H
H
H矩阵的结构,如下图:
上图就是
H
H
H矩阵的结构,小黑块就代表是有数据的,别的地方都是0,也就是说B和C是对角矩阵块,E是一个普通的矩阵,我们对对角矩阵求逆是很容易的,所以按照分块求逆可以很容易解出
Δ
x
\Delta x
Δx。
我并没有仔细去讲述怎么得出 H H H的矩阵形式,这部分内容书中介绍的很详细,所以我就只是告诉你结论。
求出了 Δ x \Delta x Δx之后,对于代价函数的优化就很容易了。实际上我们并不需要自己去设计整个算法,g2o我们已经用过好几次了,我们只要按照要求构造优化变量,程序就会为我们自动去优化和计算。
鲁棒核函数
我们想一想如果某一个测量值误差特别大,那么它的梯度也会很大,那么优化的时候,整体梯度就会被它给拉偏了,这个时候可能就会导致别的边得不到合适的值,所以就必须对边加入鲁棒核函数,抑制某些边过大,我们常常采用Huber核:
H
(
e
)
{
1
2
e
2
当
∣
e
∣
<
δ
δ
(
∣
e
∣
−
1
2
δ
)
其
他
H(e)\left\{ \begin{aligned} &\frac{1}{2}e^2 当|e|<\delta\\ &\delta(|e|-\frac12\delta) 其他 \end{aligned} \right.
H(e)⎩⎪⎨⎪⎧21e2 当∣e∣<δδ(∣e∣−21δ) 其他
非线性优化是非常重要的,光靠看书我觉得永远都不能真正理解它,如果你有时间可以挑战一下手写一个优化器,完成优化任务,可能你没有g2o或者ceres写得好,但是写完一遍你就真正的理解了非线性优化的真谛了!
实践
实践部分的两个不同库编写的代码,都不能直接运行在比较新的库上,所以需要做一些修改,这部分大家自己改吧,留给大家一个挑战(主要是我不想写了,哈哈)
如果自己都在偷懒,命运又怎么会认可你。别再虚度光阴,叫醒那个沉睡的自己。记住,只要开始,就永远不晚。