1、 登录机器人,安全维护人员用户组登录,密码kuka
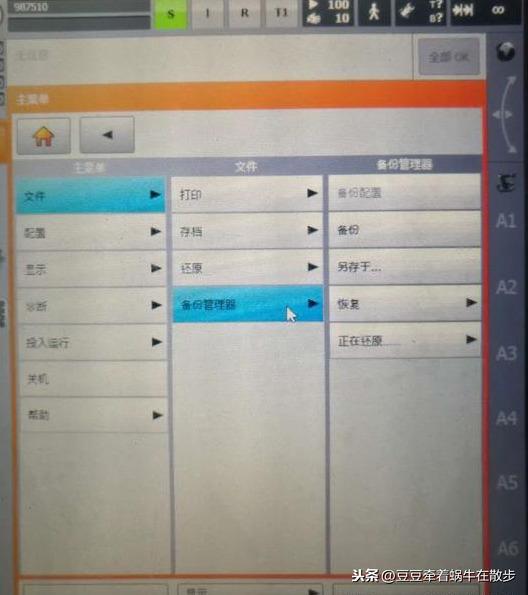
2、备份机器人系统,主菜单—>文件—>备份管理器—>另存于。
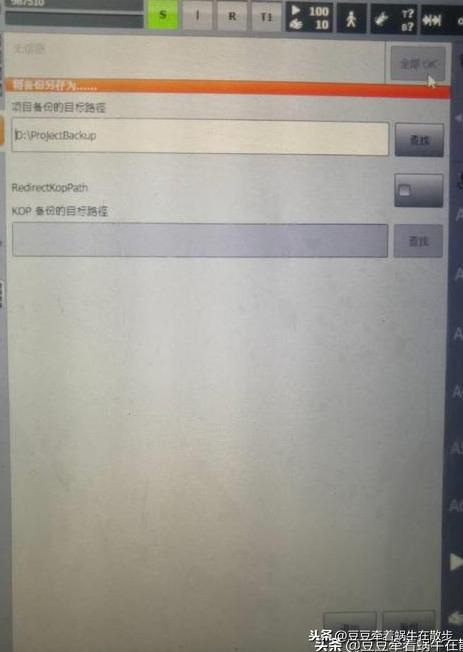
3、选择备份路径,默认。备份完成后拷贝到U盘中。
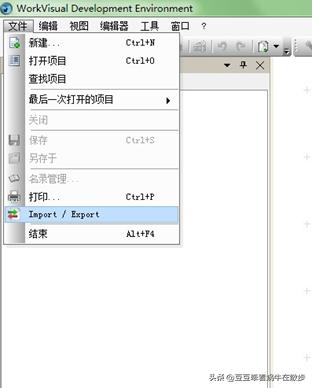
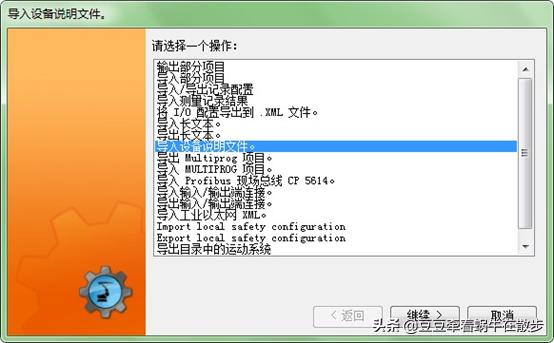
4、WorkVisual导入倍福GSD文件,需要导入EL1XXX和EL2XXX两个文件。对应输入模块EL1809和输出模块EL2809。文件—>Import/Export。
5、选择“导入设备说明文件”,点击“继续”
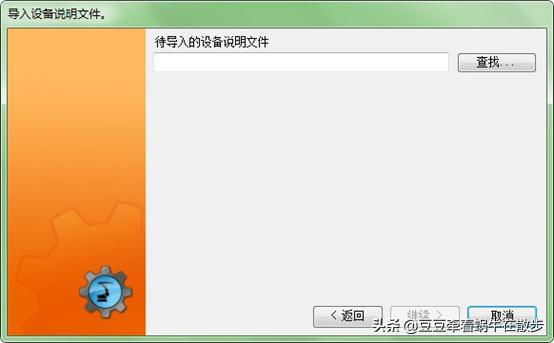
6、点击“查找”。
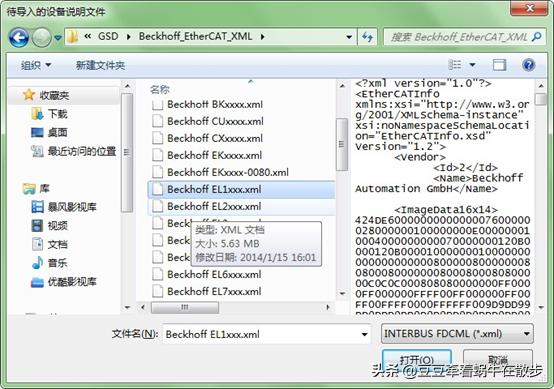
7、找到存放GSD 文件的目录下,扩展名.xml,选择GSD文件,点击“打开”按钮。添加GSD文件,要执行两次安装。
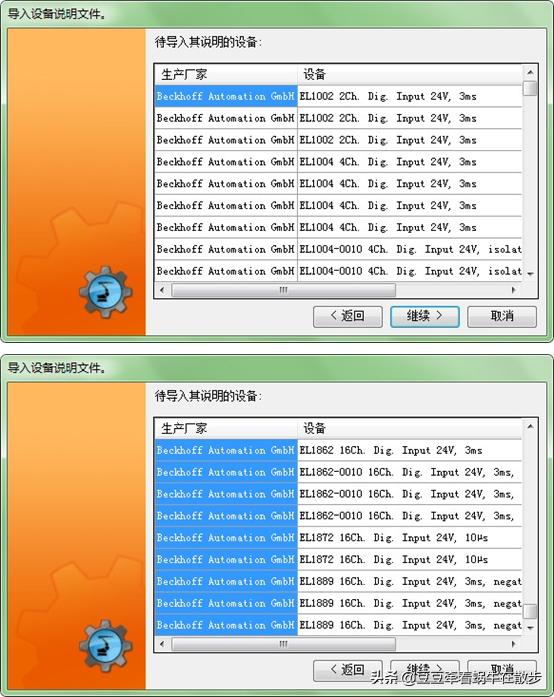
8、从第一个开始全选文件,点击“继续”。
9、文件正在安装

10、导入完成。重复4-9导入EL***。
11、双击打开机器人系统备份出来的扩展名.Asz的文件。
12、点击“完成”,设置保存路径。转换成.wvs的文件。
13、转换完成。
14、双击WorkVisual项目结构设备设备视图安全控制,总线结构会展开。

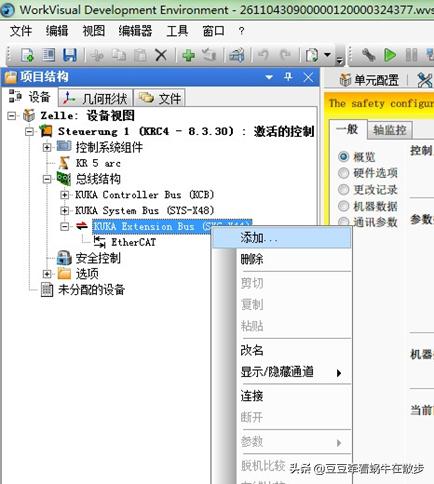
15、总线结构点右键,选择“添加”。
16、选择KUKA Extension Bus(SYS-X44)。点击“OK”。
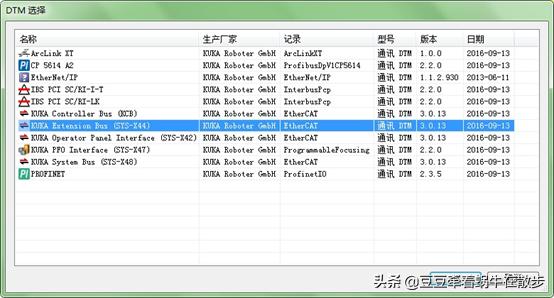
17、选中添加好的KUKA Extension Bus(SYS-X44),点击右键,选择“添加”。
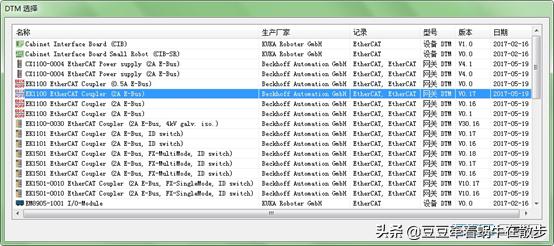
18、选择EK1100 EtherCAT Compler(2A E-Bus) V0.17,添加EK1100耦合器。
19、选中添加好的EK1100 EtherCAT Compler(2A E-Bus),点击右键,选择“添加”。
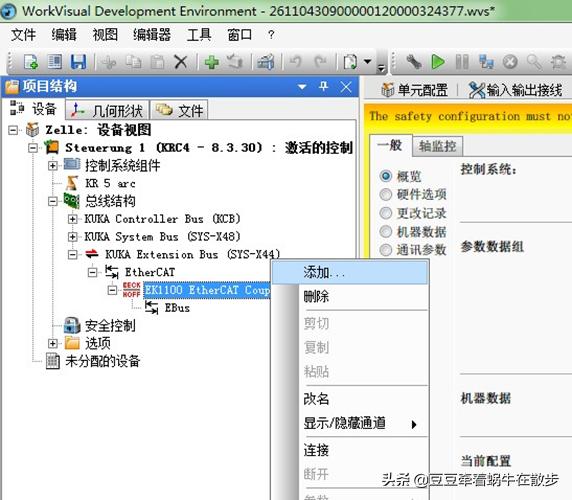
20、选择EL1809 V0.17 ,点击“OK”,完成输入模块EL1809的添加。
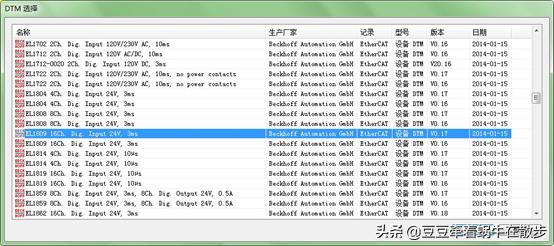
21、按照19-20同样的方法,添加输出模块EL2809 V0.17。
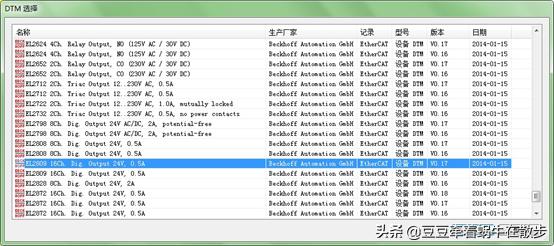
22、输入输出模块添加完成后,如下图所示。
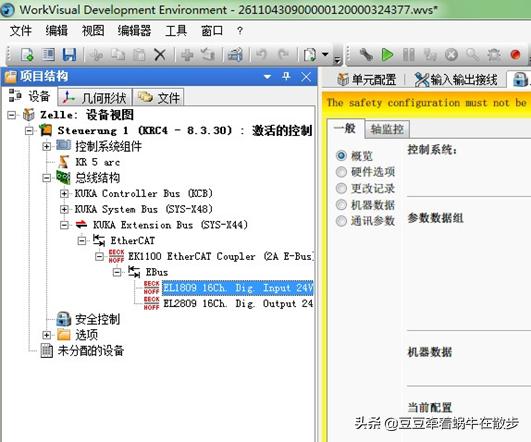
23、关联输入输出地址。点击中间栏中的“输入输出接线”,在其窗口下,左边选择“数字输入端”,在右边选择EL1809。从数字输入端选中$IN1-16,拖到Channel 1 Input。完成输入地址的关联。
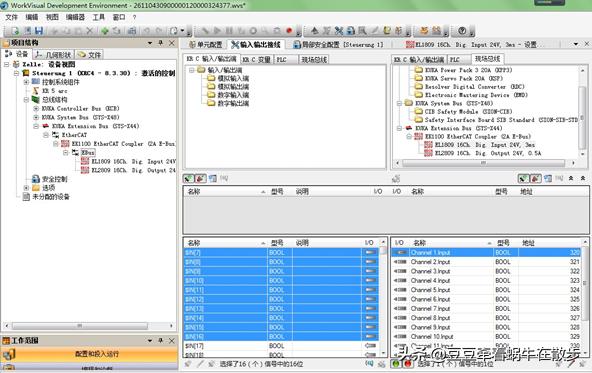
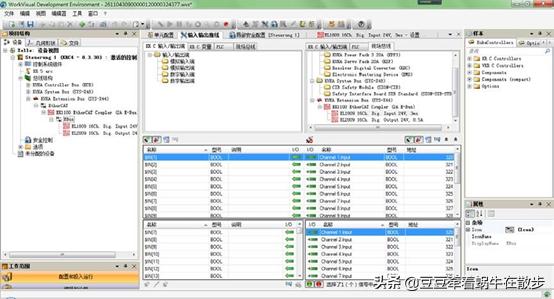
24、用同样的方法完成输出地址的关联。选择数字输出端和EL2809。把$OUT1-16拖到Channel 1Output。
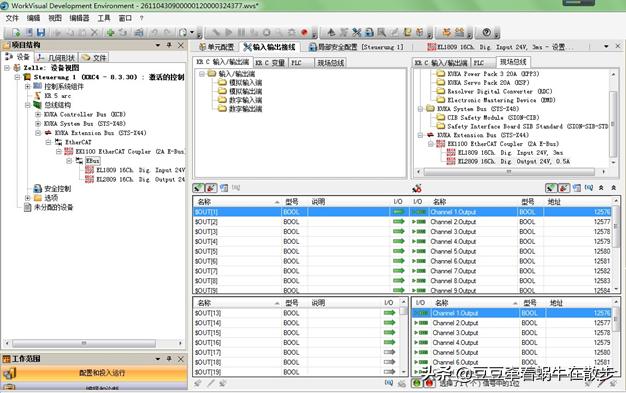
25、设置机器人控制柜KLI端口的IP地址,和电脑设置成同一网段。设置完成后要对控制柜重新启动。
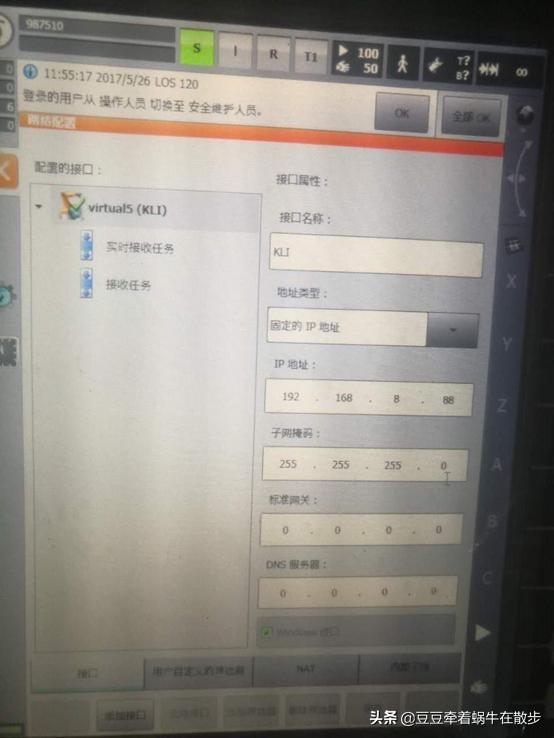
26、用网线连接计算机和控制柜上的KLI口。

27、点击工具—>安装,或者点击“安装”按钮,把做好的配置传输到机器人。

28、如果指派控制系统中蓝色箭头右侧是灰色的,请点击右边的按钮,选择在线控制系统。
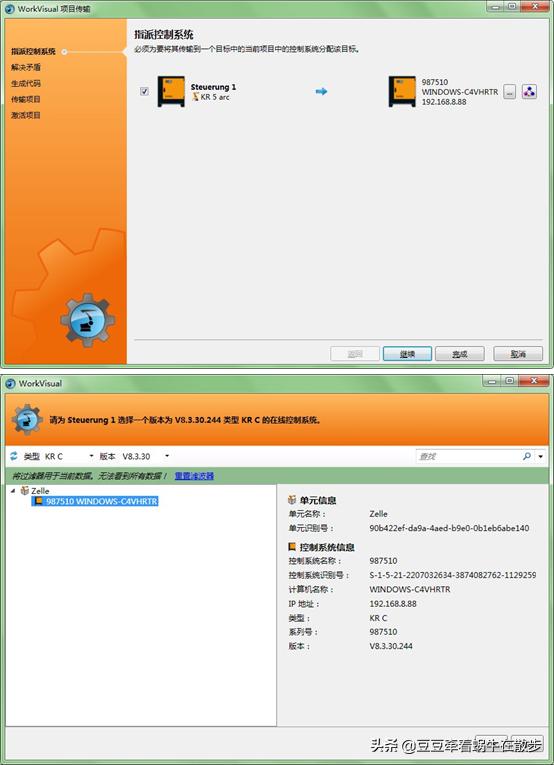
29、点击“继续”按钮,传输开始执行。传输过程中要多次点击“继续”按钮。
30、传送过程中要在机器人示教盒进行确认的操作。
31、用网线连接倍福EK1100的EtherCAT信号输入接口和机器人控制柜中的EtherCAT X44接口,如下图。
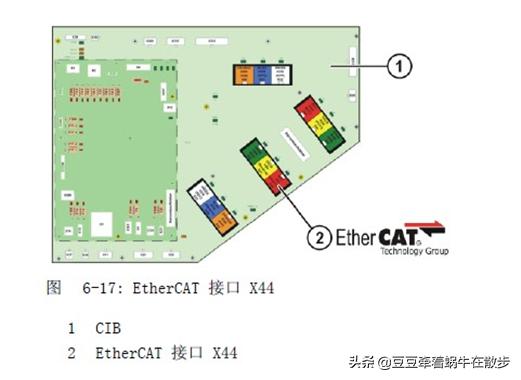


32、EK1100接线方式:24V接①②,0V接⑤③,⑥输出24V,⑦输出0V