1. ROS简介
ROS,全称Robot Operating System,是一个开源的机器人操作系统(通常运行在Ubantu系统,且有固定的版本对应)。ROS提供了操作系统应有的服务,也提供用于获取、编译、编写和跨计算机运行代码所需的工具和库函数。
2. 配置Ubuntu软件仓库
打开软件和更新对话框(可在“搜索”中进行搜索),将main,universe,multiuniverse,restricted全都勾上,将Download from换成中科大的 http://mirrors.ustc.edu,cn/ubuntu

3. 添加ROS软件源
打开终端,输入如下命令,即可添加ROS官方的软件源镜像:
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" >/etc/apt/sources.list.d/ros-latest.list'
为提高软件下载,可使用国内镜像:
Ubuntu 18.04换国内源 中科大源 阿里源 163源 清华源
4. 添加密钥
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 0xB01FA116
5. 安装ROS
更新:
sudo apt-get update
sudo apt-get update出错:N: 无法安全地用该源进行更新,所以默认禁用该源:法二亲测有效
桌面完整安装:
sudo apt-get update
【出错】E: Sub-process /usr/bin/dpkg returned an error code (1) 出错解决方案:
cd /var/lib/dpkg
sudo mv info info.bak
sudo mkdir info
sudo apt-get install shotwell
6. 初始化rosdep
需要先初始化rosdep。rosdep能够轻松地安装要编译的源代码的系统依赖关系,并且需要在ROS中运行一些核心组件。(终端运行)
sudo apt install python-rosdep2
sudo rosdep init
时出现错误提示:
ERROR: cannot download default sources list from:
https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/sources.list.d/20-default.list
Website may be down.
解决办法:手机开热点,重新执行sudo rosdep init
参考解决办法
sudo apt-get install python-rosdep python-wstool ros-melodic-ros
出错:
解决办法:用以下语句更新一下:
sudo mv /var/lib/dpkg/info/ /var/lib/dpkg/info_backup/
sudo mkdir /var/lib/dpkg/info/
sudo apt-get update
再执行
sudo rosdep init
rosdep update
rosdep update出错:
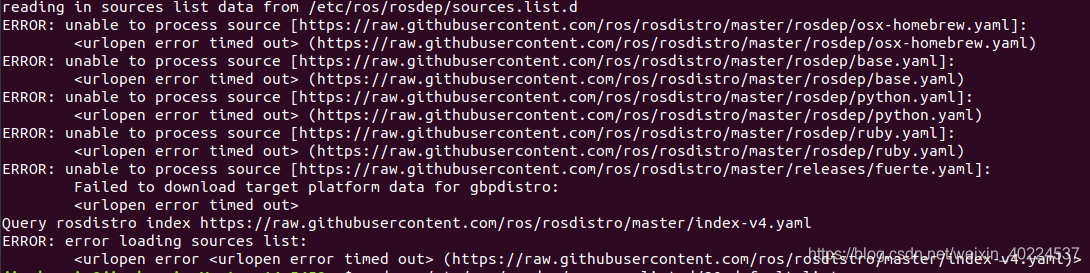
解决办法:
sudo rm /etc/ros/rosdep/sources.list.d/20-default.list
sudo rosdep init
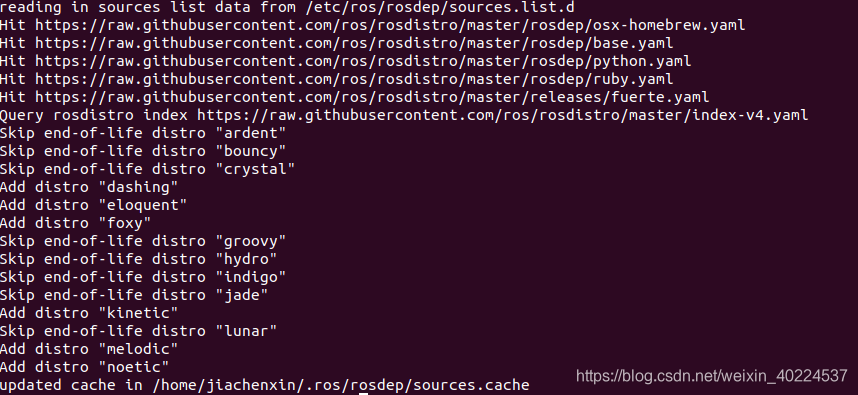
rosdep update
成功!!!
7.添加ros环境变量
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
== 如遇问题,重启即可解决==。
构建软件包的依赖关系
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential
安装完成,在终端输入进行验证:
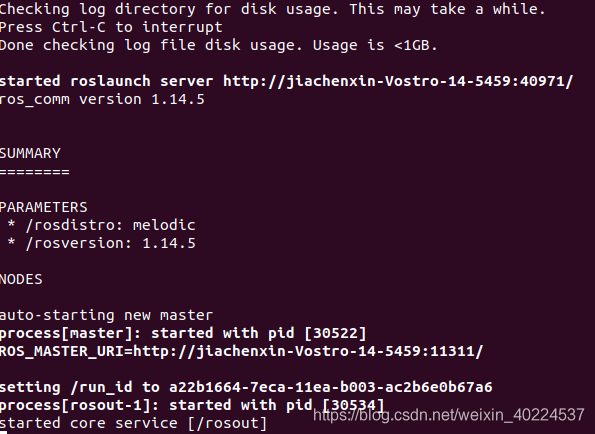
第一个终端:
roscore
rosrun turtlesim turtlesim_node
第三个终端:
rosrun turtlesim turtle_teleop_key
在第三个终端里键盘控制上下左右小海龟就能运动了。
成功!!!
参考教程
胡春旭《ROS机器人开发实践》