接触D435深度相机将近两个月了,这里总结一下这段时间的使用过程中,碰到的问题以及相关的解决方法。
所使用的配置环境如下:
win10+VS2017+PCL1.9.0+OpenCV4.1.0
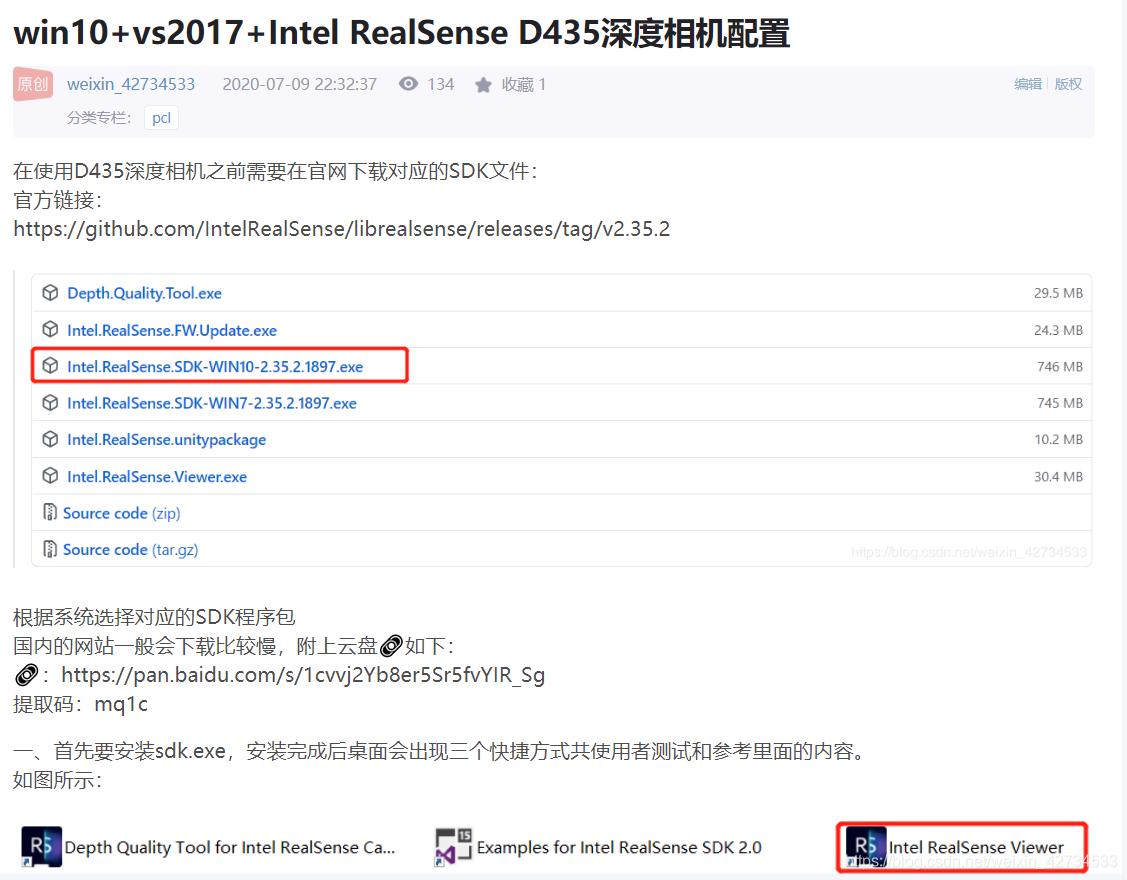
在使用相机之前,首先要下载相机厂商提供的官方SDK文件,进行学习和使用以及查阅一些基本的环境配置问题。这里可以参考之前写过的文章。
链接如下:
https://blog.csdn.net/weixin_42734533/article/details/107238151
里面有相关内容的介绍这里就不多赘述。
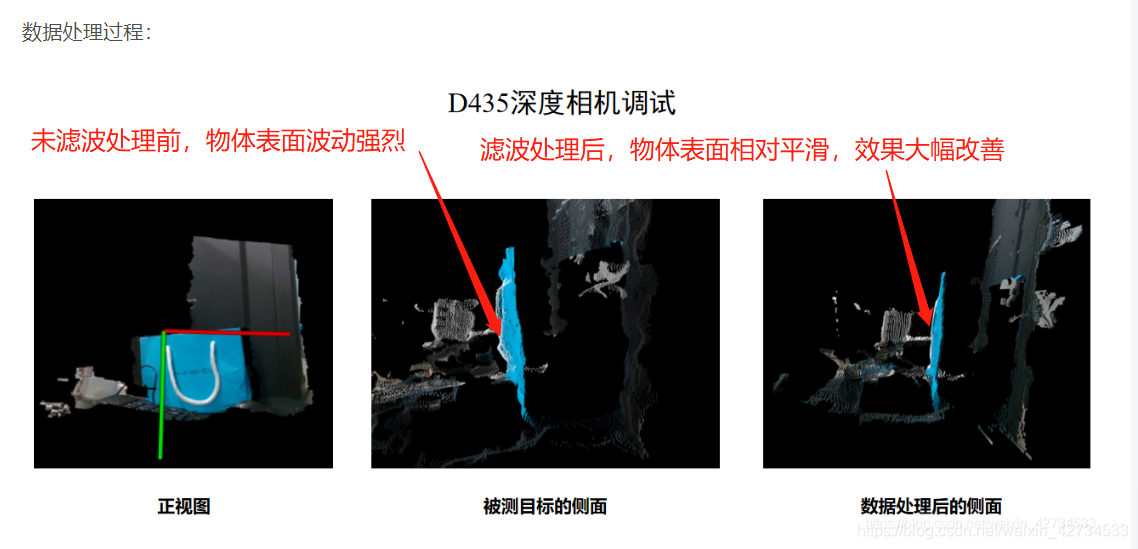
对于使用的相机,尤其是深度相机,会很看重各种数据流的融合以及数据精度。深度图像获取过程很容易收到外部环境已经相机自身因素的影响。比如
设备精度、操作者经验、环境因素等带来的影响,以及电磁波衍射特性、被测物体表面性质变化和数据拼接配准操作过程的影响,点云数据中将不可避免地出现一些噪声点,属于随机误差。
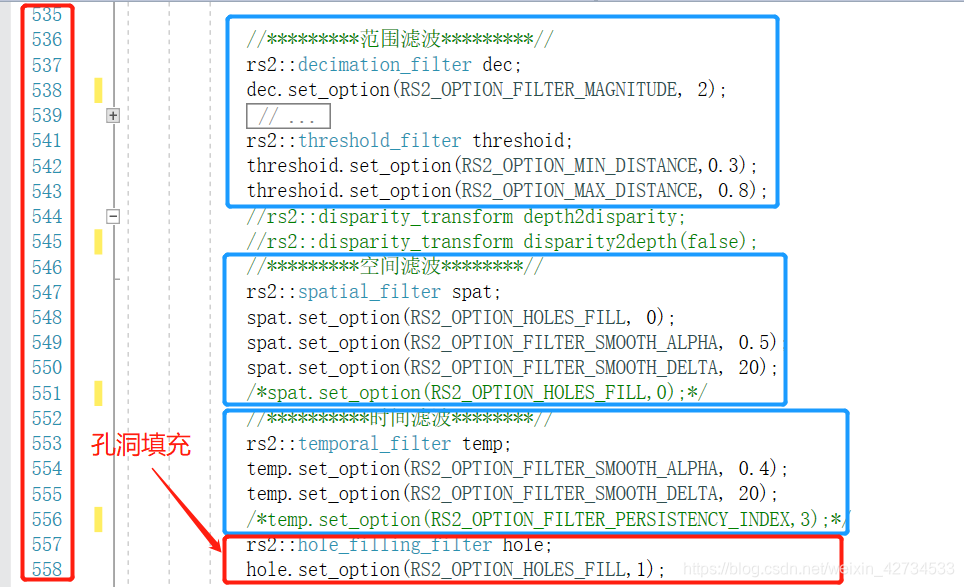
其实官方提供了以下滤波的API供用户使用,比如:时间滤波、空间滤波、孔洞填充等。可以参考之前写过的文章。
链接如下:
https://blog.csdn.net/weixin_42734533/article/details/107799480

相关代码:
然后,通过获取相机的场景数据,会发现相机的默认坐标系的坐标轴是反着的(相对而言),但遵循右手定则,为了看着更舒服些,可以对其点数据进行处理,使其坐标系与视野更能接近实际(说白了就是把点的坐标转换一下,看着舒服些)。坐标默认之所以是反着,网上有说观点说是为了适应cloudcompare软件初始界面使用的。
PS:其实上面这段的解释并不准确,现做说明和补充,其实相机采集的数据与初始安装状态的场景数据是倒着的,其目的是便于相机与机械臂(一般这款相机常与机械臂搭配使用)进行联系,这样能够保证相机获取的数据的坐标系能够与机械臂末端执行器默认坐标一致,便于进行相机与机械臂之间的坐标变换(由于旋转分量上坐标方向是一致的,只变换平移分量的位移量即可),也就是说此处不需要下图所示的代码(由于机械臂种类和型号众多,具体还需参考实际机械臂的坐标信息)。【这里说的是一些细节问题,刚开始无需太过计较,先尝试获取场景数据,后面根据实际的开发过程再修改和调整】
各种数据处理操作结束后,需要生成点云数据了,直接上整体的操作代码,按照代码中的注释和单步执行,有些代码就容易看懂了,代码量较大。
#include <iostream>
#include <algorithm>
#include <boost/date_time/posix_time/posix_time.hpp>
#include <boost/thread/thread.hpp>
#include <string>
#include <stdio.h>
#include <tchar.h>
#include <map>
#include <mutex> // std::mutex, std::lock_guard
#include <cmath> // std::ceil
#include <conio.h>
// Intel Realsense Headers 相机头文件
#include <librealsense2/rs.hpp> // Include RealSense Cross Platform API
#include "example.hpp"
// PCL Headers PCL头文件
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/filters/passthrough.h>
#include <pcl/common/common_headers.h>
#include <pcl/features/normal_3d.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/console/parse.h>
#include <boost/thread/thread.hpp>
#include <pcl/io/io.h>
#include <pcl/visualization/cloud_viewer.h>
#include <iostream>
#include <pcl/io/pcd_io.h>
#include <pcl/io/ply_io.h>
#include <pcl/point_types.h>
#include <pcl/common/io.h>
#include <pcl/impl/point_types.hpp>
#include <pcl/point_cloud.h>
// Include OpenCV API OpenCV头文件
#include <opencv2/opencv.hpp>
#include "cv-helpers.hpp"
using namespace std; //定义命名空间
using namespace cv;
//获取深度像素对应长度单位转换
float get_depth_scale(rs2::device dev);
//检查摄像头数据管道设置是否改变
bool profile_changed(const std::vector<rs2::stream_profile>& current, const std::vector<rs2::stream_profile>& prev);
typedef pcl::PointXYZRGB RGB_Cloud; //定义点云类型
typedef pcl::PointCloud<RGB_Cloud> point_cloud;
typedef point_cloud::Ptr cloud_pointer;
typedef point_cloud::Ptr prevCloud;
// Prototypes 原型
void Load_PCDFile(void);
bool userInput(void);
void cloudViewer(void);
// Global Variables 全局变量
string cloudFile; // .pcd file name
string prevCloudFile; // .pcd file name (Old cloud)
int i = 1; // Index for incremental file name 增量文件名的索引
//boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer1(new pcl::visualization::PCLVisualizer("3D Viewer"));全局共享指针
//boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer2(new pcl::visualization::PCLVisualizer("3D Viewer2"));
//boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer3(new pcl::visualization::PCLVisualizer("Captured Frame"));
声明
//std::tuple<int, int, int> RGB_Texture(rs2::video_frame texture, rs2::texture_coordinate Texture_XY);
//cloud_pointer PCL_Conversion(const rs2::points& points, const rs2::video_frame& color);
//boost::shared_ptr<pcl::visualization::PCLVisualizer> rgbVis(pcl::PointCloud<pcl::PointXYZRGB>::ConstPtr cloud);
const std::string no_camera_message = "No camera connected, please connect 1 or more";
const std::string platform_camera_name = "Platform Camera";
//设备容器
class device_container
{
// Helper struct per pipeline
struct view_port
{
std::map<int, rs2::frame> frames_per_stream;
rs2::colorizer colorize_frame;
texture tex;
rs2::pipeline pipe;
rs2::pipeline_profile profile;
};
public:
void enable_device(rs2::device dev)
{
std::string serial_number(dev.get_info(RS2_CAMERA_INFO_SERIAL_NUMBER));
std::lock_guard<std::mutex> lock(_mutex);
if (_devices.find(serial_number) != _devices.end())
{
return; //already in
}
// Ignoring platform cameras (webcams, etc..)
if (platform_camera_name == dev.get_info(RS2_CAMERA_INFO_NAME))
{
return;
}
// Create a pipeline from the given device
rs2::pipeline p;
rs2::config cfg;
cfg.enable_device(serial_number);
cfg.enable_stream(RS2_STREAM_COLOR, 640, 480, RS2_FORMAT_BGR8, 30);
cfg.enable_stream(RS2_STREAM_INFRARED, 640, 480, RS2_FORMAT_Y8, 30);
cfg.enable_stream(RS2_STREAM_DEPTH, 640, 480, RS2_FORMAT_Z16, 30);
//cfg.enable_stream(RS2_STREAM_COLOR, 1280, 720, RS2_FORMAT_BGR8, 30);
//cfg.enable_stream(RS2_STREAM_INFRARED, 1280, 720, RS2_FORMAT_Y8, 30);
//cfg.enable_stream(RS2_STREAM_DEPTH, 1280, 720, RS2_FORMAT_Z16, 30);
// Start the pipeline with the configuration
rs2::pipeline_profile profile = p.start(cfg);
// Hold it internally
_devices.emplace(serial_number, view_port{ {},{},{}, p, profile });
}
void remove_devices(const rs2::event_information& info)
{
std::lock_guard<std::mutex> lock(_mutex);
// Go over the list of devices and check if it was disconnected
auto itr = _devices.begin();
while (itr != _devices.end())
{
if (info.was_removed(itr->second.profile.get_device()))
{
itr = _devices.erase(itr);
}
else
{
++itr;
}
}
}
size_t device_count()
{
std::lock_guard<std::mutex> lock(_mutex);
return _devices.size();
}
int stream_count()
{
std::lock_guard<std::mutex> lock(_mutex);
int count = 0;
for (auto&& sn_to_dev : _devices)
{
for (auto&& stream : sn_to_dev.second.frames_per_stream)
{
if (stream.second)
{
count++;
}
}
}
return count;
}
void poll_frames()
{
std::lock_guard<std::mutex> lock(_mutex);
// Go over all device
for (auto&& view : _devices)
{
// Ask each pipeline if there are new frames available
rs2::frameset frameset;
if (view.second.pipe.poll_for_frames(&frameset))
{
for (int i = 0; i < frameset.size(); i++)
{
rs2::frame new_frame = frameset[i];
int stream_id = new_frame.get_profile().unique_id();
//view.second.frames_per_stream[stream_id] = view.second.colorize_frame.process(new_frame); //update view port with the new stream
view.second.frames_per_stream[stream_id] = new_frame; 不将深度图彩色化
}
}
}
}
void render_textures()
{
std::lock_guard<std::mutex> lock(_mutex);
int stream_num = 0;
rs2::colorizer color_map;
for (auto&& view : _devices)
{
// For each device get its frames
for (auto&& id_to_frame : view.second.frames_per_stream)
{
if (rs2::video_frame vid_frame = id_to_frame.second.as<rs2::video_frame>())
{
auto format = vid_frame.get_profile().format();
auto w = vid_frame.get_width();
auto h = vid_frame.get_height();
if (format == RS2_FORMAT_BGR8) 彩色图
{
auto colorMat = Mat(Size(w, h), CV_8UC3, (void*)vid_frame.get_data(), Mat::AUTO_STEP);
imshow("color1_" + to_string(stream_num), colorMat);
}
else if (format == RS2_FORMAT_RGB8)
{
auto colorMat = Mat(Size(w, h), CV_8UC3, (void*)vid_frame.get_data(), Mat::AUTO_STEP);
cvtColor(colorMat, colorMat, COLOR_RGB2BGR);
imshow("color2_" + to_string(stream_num), colorMat);
}
else if (format == RS2_FORMAT_Z16)
{
auto depth = vid_frame.apply_filter(color_map);
auto colorMat = Mat(Size(w, h), CV_8UC3, (void*)depth.get_data(), Mat::AUTO_STEP);
imshow("color_depth_" + to_string(stream_num), colorMat);
//auto depthMat = Mat(Size(w, h), CV_16UC1, (void*)vid_frame.get_data(), Mat::AUTO_STEP);
}
waitKey(1);
}
stream_num++;
}
}
}
void pointcloud_process() {
std::lock_guard<std::mutex> lock(_mutex);
int stream_num = 0;
rs2::frame color_frame_1, depth_frame_1;
rs2::frame color_frame_1, color_frame_2, depth_frame_1, depth_frame_2;
cloud_pointer cloud1;
cloud_pointer cloud1, cloud2;
for (auto&& view : _devices) 遍历每个设备
{
// For each device get its frames
for (auto&& id_to_frame : view.second.frames_per_stream) 每个设备一个stream里有3 帧 数据:深度帧,红外帧,彩色帧
{
if (rs2::video_frame vid_frame = id_to_frame.second.as<rs2::video_frame>())
{
auto format = vid_frame.get_profile().format();
auto w = vid_frame.get_width();
auto h = vid_frame.get_height();
int cur_num = stream_num / 3;
只获取深度帧和彩色帧
if (format == RS2_FORMAT_BGR8) 彩色帧
{
if (cur_num == 0)
color_frame_1 = vid_frame;
/*
else
color_frame_2 = vid_frame;
*/
}
else if (format == RS2_FORMAT_Z16) 深度帧
{
if (cur_num == 0)
depth_frame_1 = vid_frame;
/*
else
depth_frame_2 = vid_frame;
*/
}
}
stream_num++;
}
}
if (color_frame_1 && depth_frame_1)
if (color_frame_1 && depth_frame_1 && color_frame_2 && depth_frame_2) 若两个设备的深度帧和彩色帧均获取到,则生成点云
{
pc1.map_to(color_frame_1);
auto points1 = pc1.calculate(depth_frame_1);
//cloud1 = PCL_Conversion(points1, color_frame_1);
}
else
{
cout << "depth frame and color frame not aligned" << endl;
}
}
private:
std::mutex _mutex;
std::map<std::string, view_port> _devices;
public:
rs2::pointcloud pc1, pc2;
};
//======================================================
// RGB Texture
// - Function is utilized to extract the RGB data from
// a single point return R, G, and B values.
// Normals are stored as RGB components and
// correspond to the specific depth (XYZ) coordinate.
// By taking these normals and converting them to
// texture coordinates, the RGB components can be
// "mapped" to each individual point (XYZ).
//======================================================
//RGB图像与点云映射
std::tuple<int, int, int> RGB_Texture(rs2::video_frame texture, rs2::texture_coordinate Texture_XY)
{
// Get Width and Height coordinates of texture
int width = texture.get_width(); // Frame width in pixels 帧宽度
int height = texture.get_height(); // Frame height in pixels 帧高度
// Normals to Texture Coordinates conversion 纹理坐标的法线转换
int x_value = min(max(int(Texture_XY.u * width + .5f), 0), width - 1);
int y_value = min(max(int(Texture_XY.v * height + .5f), 0), height - 1);
int bytes = x_value * texture.get_bytes_per_pixel(); // Get # of bytes per pixel
int strides = y_value * texture.get_stride_in_bytes(); // Get line width in bytes
int Text_Index = (bytes + strides);
const auto New_Texture = reinterpret_cast<const uint8_t*>(texture.get_data());
// RGB components to save in tuple RGB组件保存在元组中
int NT1 = New_Texture[Text_Index];
int NT2 = New_Texture[Text_Index + 1];
int NT3 = New_Texture[Text_Index + 2];
return std::tuple<int, int, int>(NT1, NT2, NT3);
}
//===================================================
// PCL_Conversion
// - Function is utilized to fill a point cloud
// object with depth and RGB data from a single
// frame captured using the Realsense.
//===================================================
cloud_pointer PCL_Conversion(const rs2::points& points, const rs2::video_frame& color) {
// Object Declaration (Point Cloud) 点云对象声明
cloud_pointer cloud(new point_cloud);
cloud_pointer newCloud(new point_cloud);
// Declare Tuple for RGB value Storage (<t0>, <t1>, <t2>) 声明RGB值存储的元组
std::tuple<uint8_t, uint8_t, uint8_t> RGB_Color;
//================================
// PCL Cloud Object Configuration
//================================
// Convert data captured from Realsense camera to Point Cloud 将从Realsense相机捕获的数据转换为点云
auto sp = points.get_profile().as<rs2::video_stream_profile>();
cloud->width = static_cast<uint32_t>(sp.width());
cloud->height = static_cast<uint32_t>(sp.height());
cloud->is_dense = false;
cloud->points.resize(points.size());
auto Texture_Coord = points.get_texture_coordinates();
auto Vertex = points.get_vertices();
// Iterating through all points and setting XYZ coordinates
// and RGB values
for (int i = 0; i < points.size(); i++)
{
//===================================
// Mapping Depth Coordinates(深度坐标,深度数据以XYZ的值存储)
// - Depth data stored as XYZ values
//===================================
cloud->points[i].x = Vertex[i].x;
cloud->points[i].y = Vertex[i].y;
cloud->points[i].z = Vertex[i].z;
// Obtain color texture for specific point 获取特定点的颜色纹理
RGB_Color = RGB_Texture(color, Texture_Coord[i]);
// Mapping Color (BGR due to Camera Model)
cloud->points[i].r = get<2>(RGB_Color); // Reference tuple<2>
cloud->points[i].g = get<1>(RGB_Color); // Reference tuple<1>
cloud->points[i].b = get<0>(RGB_Color); // Reference tuple<0>
}
return cloud; // PCL RGB Point Cloud generated
}
//boost::mutex updateModelMutex;
//int main(int argc, char * argv[]) try
int main() {
const char* depth_win = "depth_Image";
namedWindow(depth_win, WINDOW_AUTOSIZE);
const char* color_win = "color_Image";
namedWindow(color_win, WINDOW_AUTOSIZE);
rs2::colorizer c;
int ch;
bool captureLoop = true; // Loop control for generating point clouds 用于生成点云的循环控制
device_container connected_devices;
rs2::context ctx; // Create librealsense context for managing devices 为管理设备创建librealsense上下文
// Register callback for tracking which devices are currently connected
//寄存器回调,用于跟踪当前连接的设备
ctx.set_devices_changed_callback([&](rs2::event_information& info)
{
connected_devices.remove_devices(info);
for (auto&& dev : info.get_new_devices())
{
connected_devices.enable_device(dev);
}
});
// Initial population of the device list 设备列表的初始填充
for (auto&& dev : ctx.query_devices()) // Query the list of connected RealSense devices 查询已连接的RealSense设备的列表
{
connected_devices.enable_device(dev);
}
//rs2::decimation_filter dec_filter; // Decimation - reduces depth frame density
if ((int)connected_devices.device_count() == 0)
{
cerr << no_camera_message << endl;
return EXIT_FAILURE;
}
点云显示
else if ((int)connected_devices.device_count() == 1)
{
//
pcl::PointCloud<pcl::PointXYZRGB>::Ptr newCloud(new pcl::PointCloud<pcl::PointXYZRGB>);
boost::shared_ptr<pcl::visualization::PCLVisualizer> openCloud;
/
//创建数据管道流
rs2::pointcloud pc; //声明pointcloud对象,用于计算点云和纹理映射
rs2::pipeline pipe; //声明RealSense管道,封装实际的设备和传感器 //
rs2::config cfg; //为使用非默认配置文件配置管道创建配置 //
rs2::colorizer color_map;
cfg.enable_stream(RS2_STREAM_COLOR, 640, 480, RS2_FORMAT_BGR8, 30); ///
cfg.enable_stream(RS2_STREAM_INFRARED, 640, 480, RS2_FORMAT_Y8, 30); //
cfg.enable_stream(RS2_STREAM_DEPTH, 640, 480, RS2_FORMAT_Z16, 30); //
//cfg.enable_stream(RS2_STREAM_COLOR, 1280, 720, RS2_FORMAT_BGR8, 30); ///
//cfg.enable_stream(RS2_STREAM_INFRARED, 1280, 720, RS2_FORMAT_Y8, 30); //
//cfg.enable_stream(RS2_STREAM_DEPTH, 1280, 720, RS2_FORMAT_Z16, 30); //
rs2::pipeline_profile selection = pipe.start(cfg); // selection
rs2::device selected_device = selection.get_device();
auto depth_sensor = selected_device.first<rs2::depth_sensor>();
if (depth_sensor.supports(RS2_OPTION_EMITTER_ENABLED))
{
depth_sensor.set_option(RS2_OPTION_EMITTER_ENABLED, 1.f); // Enable emitter
/*depth_sensor.set_option(RS2_OPTION_EMITTER_ENABLED, 0.f);*/ // Disable emitter
}
if (depth_sensor.supports(RS2_OPTION_LASER_POWER))
{
// Query min and max values: 查询最小和最大值
auto range = depth_sensor.get_option_range(RS2_OPTION_LASER_POWER);
depth_sensor.set_option(RS2_OPTION_LASER_POWER, range.max); // Set max power
depth_sensor.set_option(RS2_OPTION_LASER_POWER, 1.f); //
}
/
float depth_scale = get_depth_scale(selection.get_device());
rs2_stream align_to = RS2_STREAM_COLOR;
rs2::align align(align_to);
float depth_clipping_distance = 1.f;
//
// Loop and take frame captures upon user input
while (captureLoop == true) {
// Set loop flag based on user input
if (captureLoop == false) { break; }
///
// Wait for frames from the camera to settle 等待来自相机的帧稳定下来
for (int i = 0; i < 50; i++) {
auto frames = pipe.wait_for_frames(); //Drop several frames for auto-exposure 放下几帧自动曝光
}
//滤波后处理
/*rs2::colorizer color_map;
color_map.set_option(RS2_OPTION_COLOR_SCHEME, 2.f);*/
//*********范围滤波*********//
rs2::decimation_filter dec;
dec.set_option(RS2_OPTION_FILTER_MAGNITUDE, 2);
//rs2::hole_filling_filter hole;
//hole.set_option(RS2_OPTION_HOLES_FILL,1);
rs2::threshold_filter threshoid;
threshoid.set_option(RS2_OPTION_MIN_DISTANCE,0.3);
threshoid.set_option(RS2_OPTION_MAX_DISTANCE, 0.8);
//rs2::disparity_transform depth2disparity;
//rs2::disparity_transform disparity2depth(false);
//*********空间滤波********//
rs2::spatial_filter spat;
spat.set_option(RS2_OPTION_HOLES_FILL, 0);
spat.set_option(RS2_OPTION_FILTER_SMOOTH_ALPHA, 0.5);
spat.set_option(RS2_OPTION_FILTER_SMOOTH_DELTA, 20);
/*spat.set_option(RS2_OPTION_HOLES_FILL,0);*/
//**********时间滤波********//
rs2::temporal_filter temp;
temp.set_option(RS2_OPTION_FILTER_SMOOTH_ALPHA, 0.4);
temp.set_option(RS2_OPTION_FILTER_SMOOTH_DELTA, 20);
/*temp.set_option(RS2_OPTION_FILTER_PERSISTENCY_INDEX,3);*/
rs2::hole_filling_filter hole;
hole.set_option(RS2_OPTION_HOLES_FILL,1);
rs2::align align_to(RS2_STREAM_DEPTH);
LOOP:
while (cvGetWindowHandle(depth_win) && cvGetWindowHandle(color_win)) // Application still alive?
{
depth_sensor.supports(RS2_OPTION_LASER_POWER);
// Query min and max values: 查询最小和最大值
auto range = depth_sensor.get_option_range(RS2_OPTION_LASER_POWER);
depth_sensor.set_option(RS2_OPTION_LASER_POWER, range.max); // Set max power
depth_sensor.set_option(RS2_OPTION_LASER_POWER, 1.f); // laser
// Using the align object, we block the application until a frameset is available
//堵塞程序直到新的一帧捕获
rs2::frameset frameset = pipe.wait_for_frames();
//frameset = frameset.apply_filter(align_to);
// 抽取会降低深度图像的分辨率,关闭小孔并加快算法
frameset = frameset.apply_filter(dec);
frameset = frameset.apply_filter(spat);
frameset = frameset.apply_filter(threshoid);
frameset = frameset.apply_filter(temp);
frameset = frameset.apply_filter(color_map);
// rs2::pipeline::wait_for_frames() can replace the device it uses in case of device error or disconnection.
// Since rs2::align is aligning depth to some other stream, we need to make sure that the stream was not changed
//因为rs2::align 正在对齐深度图像到其他图像流,我们要确保对齐的图像流不发生改变
// after the call to wait_for_frames();
if (profile_changed(pipe.get_active_profile().get_streams(), selection.get_streams()))
{
//If the profile was changed, update the align object, and also get the new device's depth scale
//如果profile发生改变,则更新align对象,重新获取深度图像像素到长度单位的转换比例
selection = pipe.get_active_profile();
align = rs2::align(align_to);
depth_scale = get_depth_scale(selection.get_device());
}
//Get processed aligned frame
//获取对齐后的帧
auto processed = align.process(frameset);
// Trying to get both other and aligned depth frames
//尝试获取对齐后的深度图像帧和其他帧
rs2::frame aligned_color_frame = processed.get_color_frame();//processed.first(align_to);
rs2::frame aligned_depth_frame = processed.get_depth_frame().apply_filter(c);;
//获取对齐之前的color图像
rs2::frame before_depth_frame = frameset.get_depth_frame().apply_filter(c);
//获取宽高
const int depth_w = aligned_depth_frame.as<rs2::video_frame>().get_width();
const int depth_h = aligned_depth_frame.as<rs2::video_frame>().get_height();
const int color_w = aligned_color_frame.as<rs2::video_frame>().get_width();
const int color_h = aligned_color_frame.as<rs2::video_frame>().get_height();
const int b_color_w = before_depth_frame.as<rs2::video_frame>().get_width();
const int b_color_h = before_depth_frame.as<rs2::video_frame>().get_height();
//If one of them is unavailable, continue iteration
if (!aligned_depth_frame || !aligned_color_frame)
{
continue;
}
//创建OPENCV类型 并传入数据
Mat aligned_depth_image(Size(depth_w, depth_h), CV_8UC3, (void*)aligned_depth_frame.get_data(), Mat::AUTO_STEP);
Mat aligned_color_image(Size(color_w, color_h), CV_8UC3, (void*)aligned_color_frame.get_data(), Mat::AUTO_STEP);
Mat before_color_image(Size(b_color_w, b_color_h), CV_8UC3, (void*)before_depth_frame.get_data(), Mat::AUTO_STEP);
//显示
imshow(depth_win, aligned_depth_image);
imshow(color_win, aligned_color_image);
imshow("before aligned", before_color_image);
waitKey(1); //注意循环时间为5s一次,相应比较慢
//while (captureLoop) {
// 单台相机
auto depth = processed.get_depth_frame();
auto RGB = processed.get_color_frame();
单台相机
Map Color texture to each point 将颜色纹理映射到每个点
//pc.map_to(RGB);
Generate Point Cloud 生成点云
//auto points = pc.calculate(depth);
Convert generated Point Cloud to PCL Formatting将生成的点云转换为PCL格式
//cloud_pointer cloud = PCL_Conversion(points, RGB);
//
转换点云数据的坐标与实际场景相对应
改变默认情况下,X轴和Y轴的坐标与实际相反的问题
//for (int i = 0; i < cloud->points.size(); i++)
//{
// cloud->points[i].x = -cloud->points[i].x;
// cloud->points[i].y = -cloud->points[i].y;
//}
if (_kbhit()) {//如果有按键按下,则_kbhit()函数返回真
pc.map_to(RGB);
// Generate Point Cloud 生成点云
auto points = pc.calculate(depth);
//Convert generated Point Cloud to PCL Formatting将生成的点云转换为PCL格式
cloud_pointer cloud = PCL_Conversion(points, RGB);
//转换点云数据的坐标与实际场景相对应
// 改变默认情况下,X轴和Y轴的坐标与实际相反的问题
for (int i = 0; i < cloud->points.size(); i++)
{
cloud->points[i].x = -cloud->points[i].x;
cloud->points[i].y = -cloud->points[i].y;
}
ch = _getch();//使用_getch()函数获取按下的键值
//cout << ch;
if (ch == 13) {
//当按下Enter时循环,Enter键的键值时13.
captureLoop = userInput();
if (captureLoop == false)
{
goto LOOP;
}
cloudFile = "Captured_Frame" + to_string(i) + ".pcd";
//==============================
// Write PC to .pcd File Format
//==============================
// Take Cloud Data and write to .PCD File Format
cout << "Generating PCD Point Cloud File... " << endl;
pcl::io::savePCDFileASCII("F://test2.pcd", *cloud); // Input cloud to be saved to .pcd
cout << cloudFile << " successfully generated. " << endl;
//Load generated PCD file for viewing
Load_PCDFile();
i++; // Increment File Name
}
}
/*waitKey(1000);*/
}
cout << "Exiting Program... " << endl;
return EXIT_SUCCESS;
}
}
}
void Load_PCDFile(void)
{
string openFileName;
// Generate object to store cloud in .pcd file
pcl::PointCloud<pcl::PointXYZRGB>::Ptr cloudView(new pcl::PointCloud<pcl::PointXYZRGB>);
openFileName = "Captured_Frame" + to_string(i) + ".pcd";
pcl::io::loadPCDFile("F://test2.pcd", *cloudView); // Load .pcd File
//==========================
// Pointcloud Visualization
//==========================
// Create viewer object titled "Captured Frame"
boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer(new pcl::visualization::PCLVisualizer("Captured Frame"));
//set CoordinateSystem
viewer->addCoordinateSystem(0.1);
// Set background of viewer to black
viewer->setBackgroundColor(0, 0, 0);
// Add generated point cloud and identify with string "Cloud"
viewer->addPointCloud<pcl::PointXYZRGB>(cloudView, "Cloud");
// Default size for rendered points
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 1, "Cloud");
// Viewer Properties
viewer->initCameraParameters(); // Camera Parameters for ease of viewing
cout << endl;
cout << "Press [Q] in viewer to continue. " << endl;
viewer->spin(); // Allow user to rotate point cloud and view it
// Note: No method to close PC visualizer, pressing Q to continue software flow only solution.
}
//========================================
// userInput
// - Prompts user for a char to
// test for decision making.
// [y|Y] - Capture frame and save as .pcd
// [n|N] - Exit program
//========================================
bool userInput(void) {
bool setLoopFlag;
bool inputCheck = false;
char takeFrame; // Utilize to trigger frame capture from key press ('t')
do {
// Prompt User to execute frame capture algorithm
cout << endl;
cout << "Generate a Point Cloud? [y/n] ";
cin >> takeFrame;
cout << endl;
// Condition [Y] - Capture frame, store in PCL object and display
if (takeFrame == 'y' || takeFrame == 'Y') {
setLoopFlag = true;
inputCheck = true;
takeFrame = 0;
}
// Condition [N] - Exit Loop and close program
else if (takeFrame == 'n' || takeFrame == 'N') {
setLoopFlag = false;
inputCheck = true;
takeFrame = 0;
}
// Invalid Input, prompt user again.
else {
inputCheck = false;
cout << "Invalid Input." << endl;
takeFrame = 0;
}
} while (inputCheck == false);
return setLoopFlag;
}
float get_depth_scale(rs2::device dev)
{
// Go over the device's sensors
for (rs2::sensor& sensor : dev.query_sensors())
{
// Check if the sensor if a depth sensor
if (rs2::depth_sensor dpt = sensor.as<rs2::depth_sensor>())
{
return dpt.get_depth_scale();
}
}
throw std::runtime_error("Device does not have a depth sensor");
}
bool profile_changed(const std::vector<rs2::stream_profile>& current, const std::vector<rs2::stream_profile>& prev)
{
for (auto&& sp : prev)
{
//If previous profile is in current (maybe just added another)
auto itr = std::find_if(std::begin(current), std::end(current), [&sp](const rs2::stream_profile& current_sp) { return sp.unique_id() == current_sp.unique_id(); });
if (itr == std::end(current)) //If it previous stream wasn't found in current
{
return true;
}
}
return false;
}
代码比较多,后面肯定需要对代码再进行整理和精炼。
简单介绍一下代码的运行过程吧。
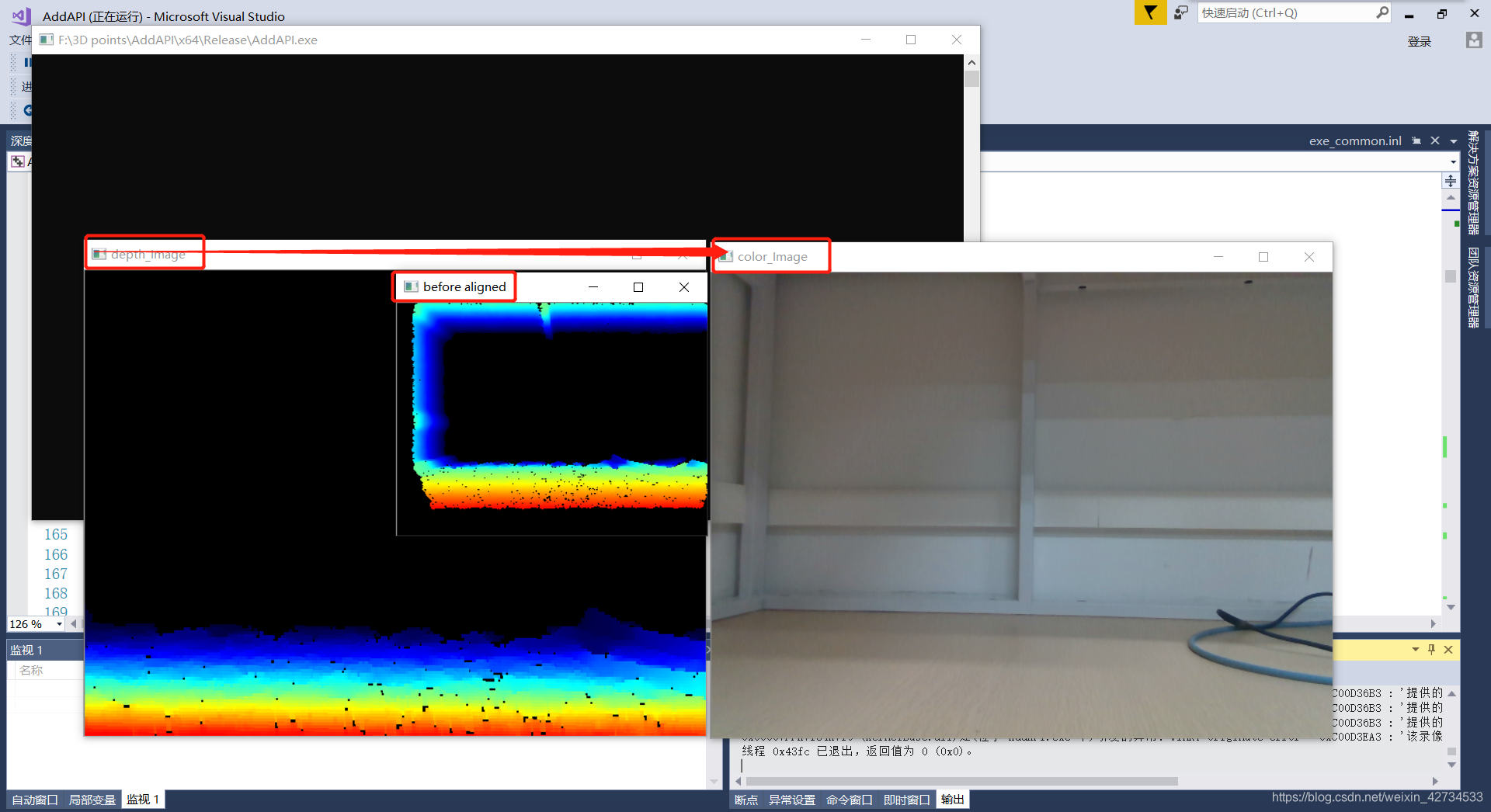
两幅深度图,一副是对齐前的一副是对齐后的。后面操作选择对齐后的深度图与RGB图像进行映射匹配。
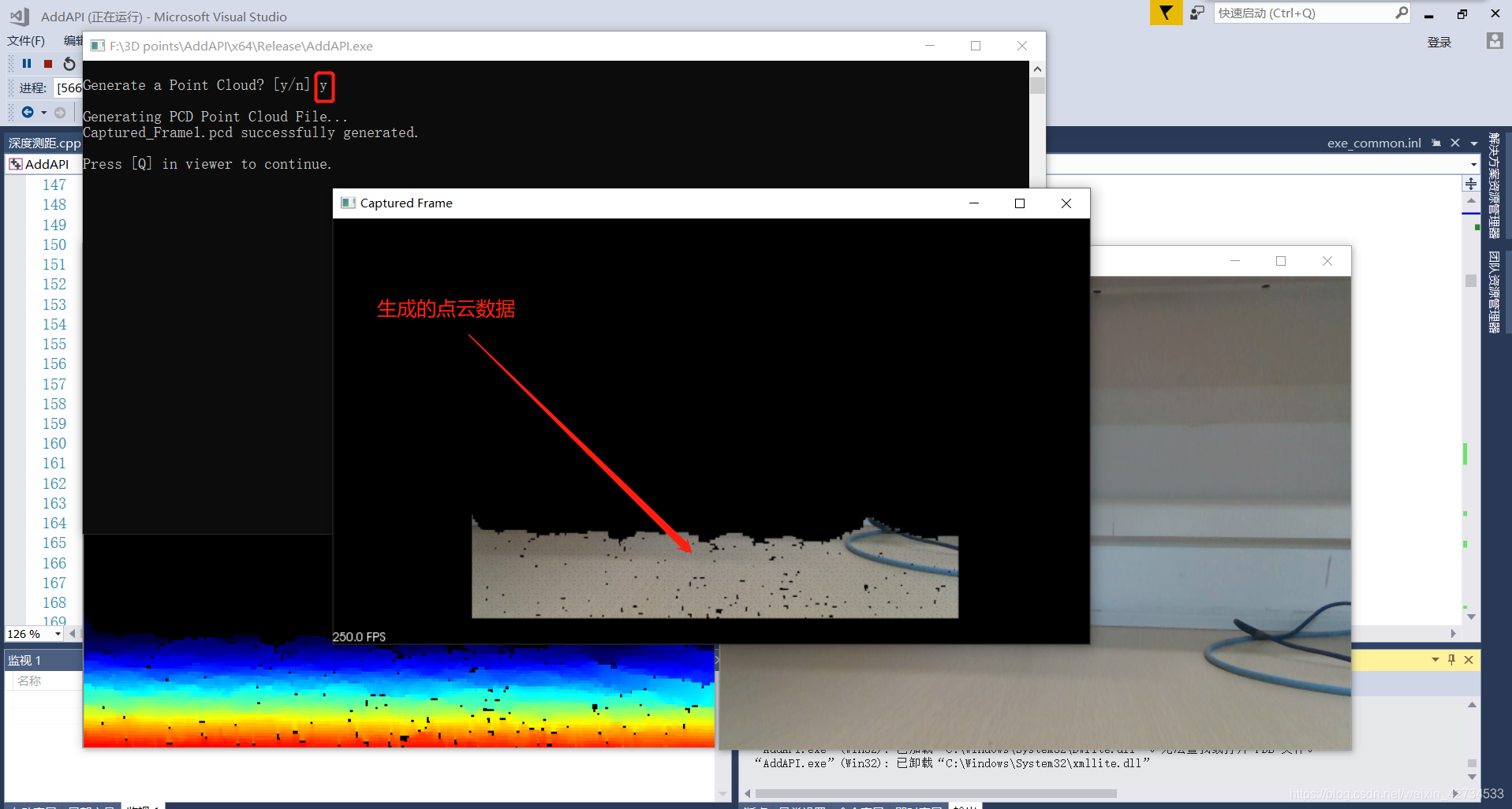
当键盘点击enter键后,会出现提示,输入y或者Y,即可生成场景的点云数据。如图所示。
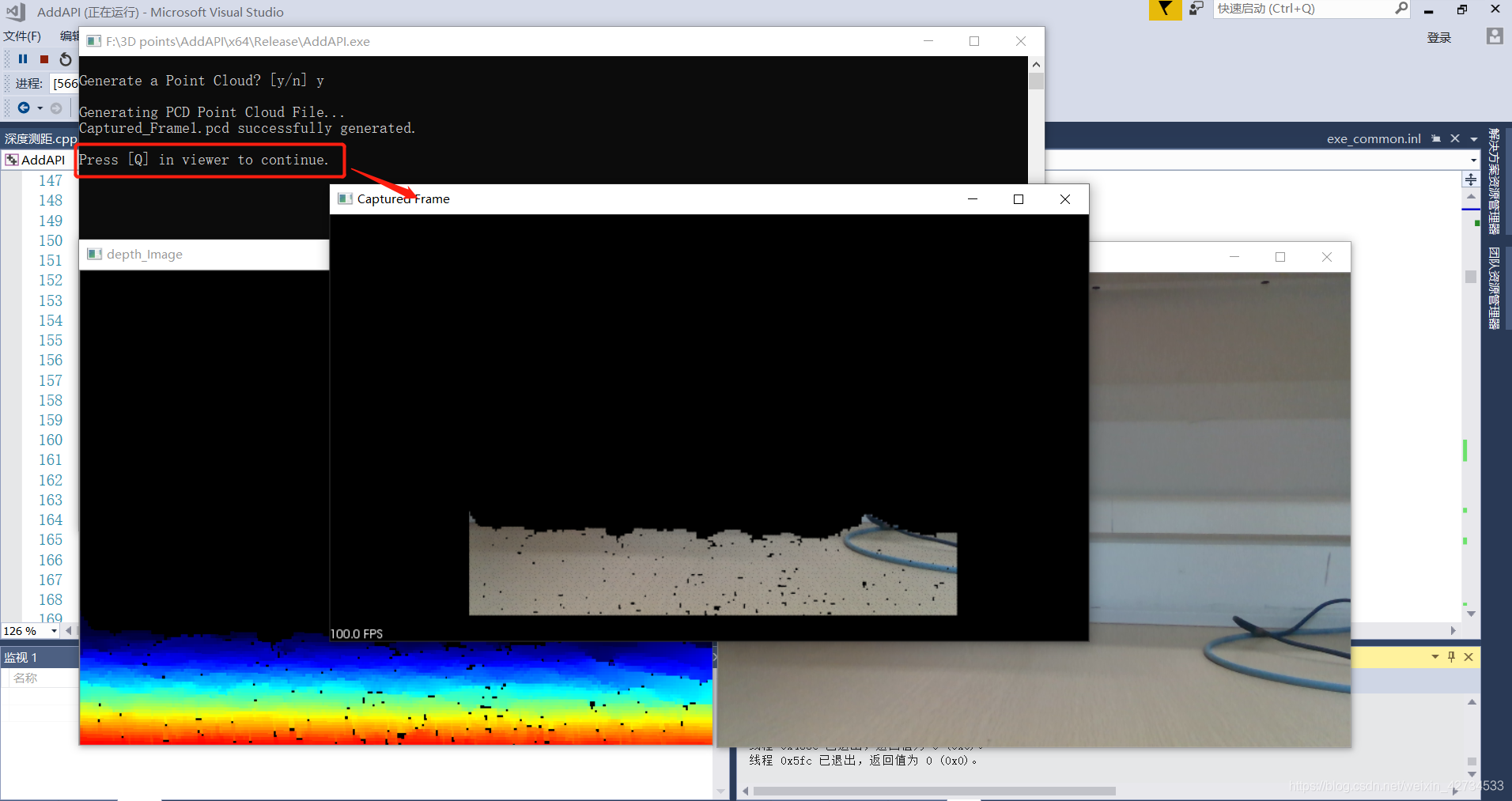
当在点云可视化界面按【Q】键时,继续进入点云数据采集循环中,如下图所示:
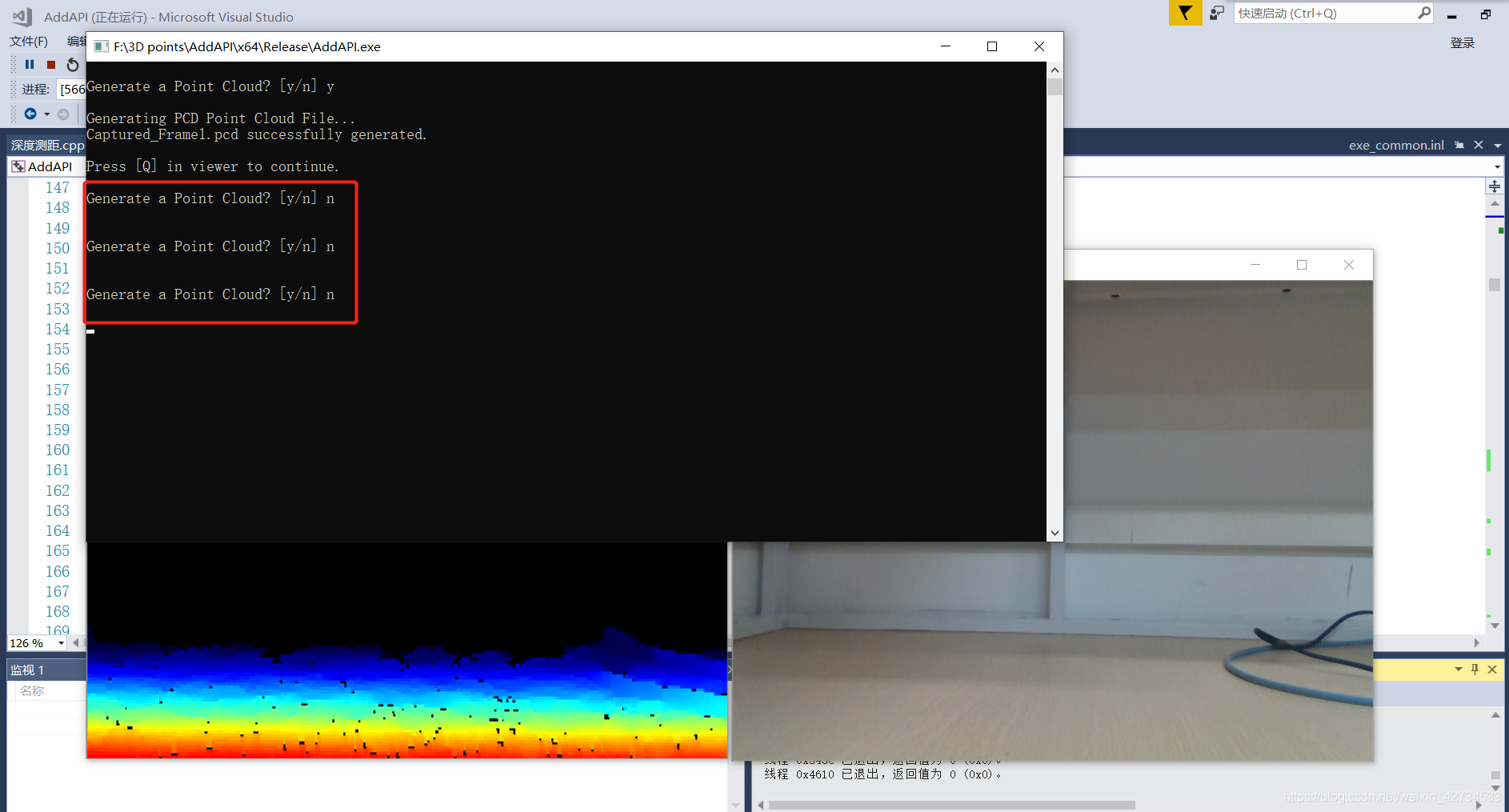
当输入【N或n】键时,程序则进入待采集循环中,一致等待生成点云的指令输入,如下图所示:
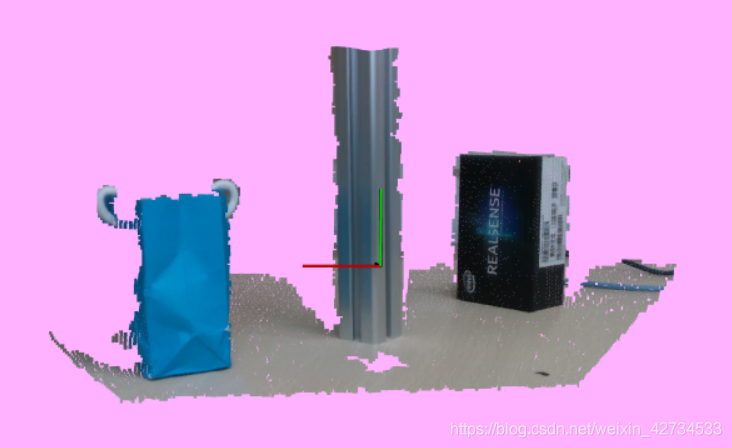
附上一张场景中有目标的点云图像,该点云数据在PCL可视化模块中显示,如图所示:
OK,以上时这段时间对D435深度相机的学习和使用,后续还会分享使用过程中的一些应用和案例。