MATLAB控制STK实现:仿真并获取低轨卫星与指定区域地面站的可见性数据
本次仿真主要参考了多篇文献和网站,包括但不限于:《Using MATLAB for STK Automation》、CSDN博文: 拜火先知的博客_CSDN博客-笔记、AGI官网有关MATLAB的内容等内容,学习后很有收获,在此写下学习记录。
文章目录
实验目的
使用MATLAB控制STK,实现如下功能:
- 生成1颗LEO卫星或产生一个LEO星座
- 在指定的区域内均匀分布目标接收机,指定区域大小为100km或500km
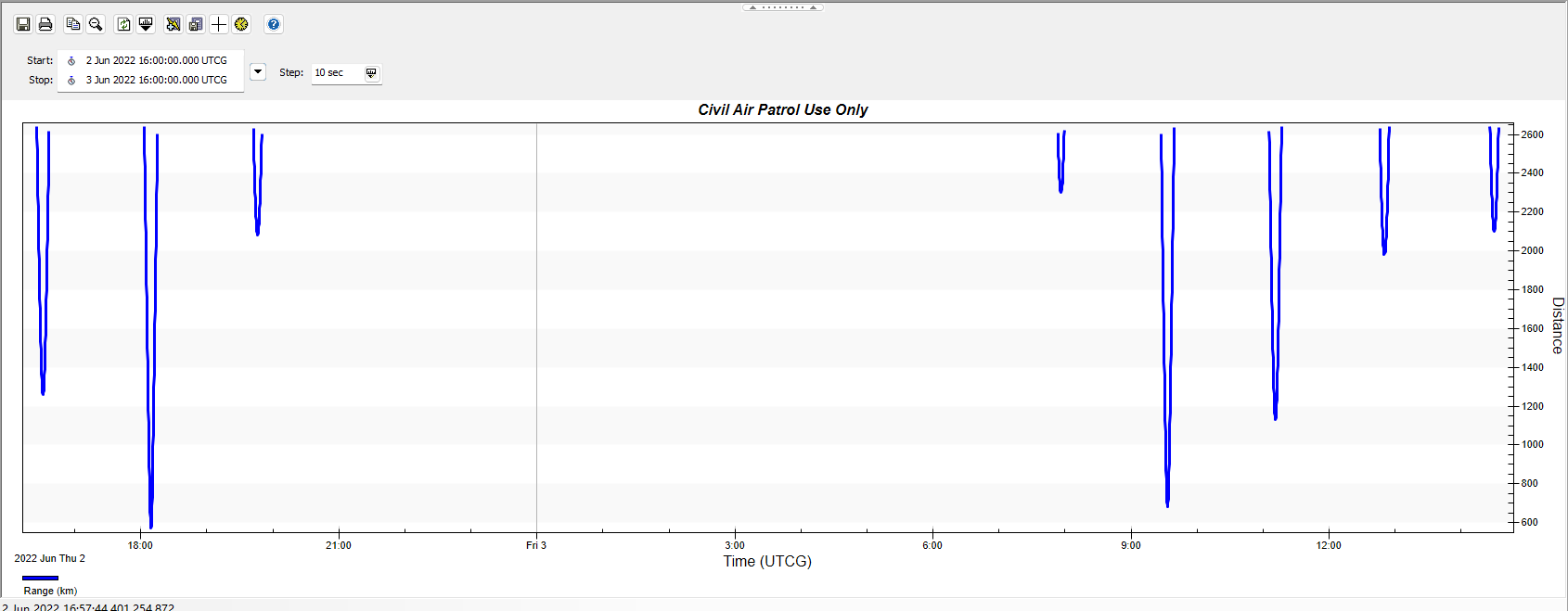
- 通过STK的access分析低轨卫星在过顶时,卫星相对于目标接收机的距离/速度/加速度/多普勒频率(分辨率为10s)
MATLAB与STK互联并创建场景
MATLAB与STK互联,主要有两种方式,一种是connect、一种是com口。这里主要采用com口形式,要比connect连接简单一些。
在MATLAB命令窗口(或新建.m文件)输入以下命令:
%这里改成自己STK的版本号
uiapplication = actxserver(‘STK11.application’);
键入下面的代码以创建具有自定义时间段的新场景。
%root是以后操作场景以及场景中对象的源头
root = app.Per sonality2;
%新建场景
scenario = root.Children.New('eScenario','MATLAB_PredatorMission');
%将场景保存在指定目录下,同时可以将场景重新命名
root.SaveScenarioAs('E:\Program Files\STK\Documents\STK 11 (x64)\Scenario1_jz2');
scenario.SetTimePeriod('2 Jun 2022 16:00:00.000','3 Jun 2022 16:00:00.000');
scenario.StartTime = '2 Jun 2022 16:00:00.000';
scenario.StopTime = '3 Jun 2022 16:00:00.000';
root.ExecuteCommand('Animate * Reset');
创建新卫星对象
以下代码,将新建卫星对象。控制句柄为sat
%mysat是卫星在STK场景中的名字
sat = scenario.Children.New(‘eSatellite’,'mysat');
%执行下面命令,也可建立卫星。因为‘eSatellite’枚举序号为18
%sat = scenario.Children.New(18,‘mysat’);
%执行Propagate命令后,卫星将运行,即在STK中可以看到卫星运行轨迹
sat.Propagator.Propagate;
关于STK卫星对象属性值的设置,参见MATLAB与STK互联5:查看STK中对象的属性(2)—卫星对象属性梳理1_拜火先知的博客-CSDN博客
在新建卫星对象后,直接执行:sat.Propagate语句,会生成STK默认参数的卫星。默认参数为:倾角28.5°,轨道高度300km的圆轨道,动力学模型为二体模型。
我们在分析问题时,绝大多数情况下都不会使用上述的默认参数,这就涉及到卫星轨道参数设置。卫星轨道参数设置,也存在多种方法,下面介绍:设置经典的轨道六根数。
%将卫星轨道参数转换为开普勒六根数形式
kep=satPro.InitialState.Representation.ConvertTo(‘eOrbitStateClassical’);
%卫星轨道参数设置,可选择的形式有以下几种
%eOrbitStateClassical—经典轨道六根数形式
%eOrbitStateCartesian—位置、速度信息形式
%其他形式,大家可根据STK属性页查看,命名规则大致如上
下面是卫星参数设置,是本文重点
轨道类型设置
kep.SizeShapeType = 'eSizeShapeAltitude';
这里轨道形状类型,可以查看STK卫星轨道属性页面,有如下参数:
eSizeShapeSemimajorAxis—半长轴+偏心率型
eSizeShapeAltitude—远地点、近地点高度型
eSizeShapeRadius—远地点、近地点半径型
eSizeShapePeriod—轨道周期型
eSizeShapeMeanmotion—平动型
+++
LocationType:用于指定航天器在epoch轨道上的位置的元素
Orientation:轨道方向
kep.LocationType = 'eLocationTrueAnomaly';
kep.Orientation.AscNodeType = 'eAscNodeLAN';
+++
SizeShape:轨道的大小和形状
Orientation:轨道方向
Orientation.ArgOfPerigee:在卫星运动方向和轨道平面上,从上升节点到偏心矢量(轨道最低点)的角度。使用角维度。
Orientation.Inclination:轨道倾角。角动量矢量(垂直于轨道平面)和惯性Z轴之间的角。使用角维度。
kep.SizeShape.PerigeeAltitude = 500;
kep.SizeShape.ApogeeAltitude = 500;
kep.Orientation.Inclination = 60;
kep.Orientation.ArgOfPerigee = 0;
kep.Orientation.AscNode.Value = 0;
kep.Location.Value = 0;
+++
显示卫星轨迹
sat.Propagator.InitialState.Representation.Assign(kep);
sat.Propagator.Propagate;
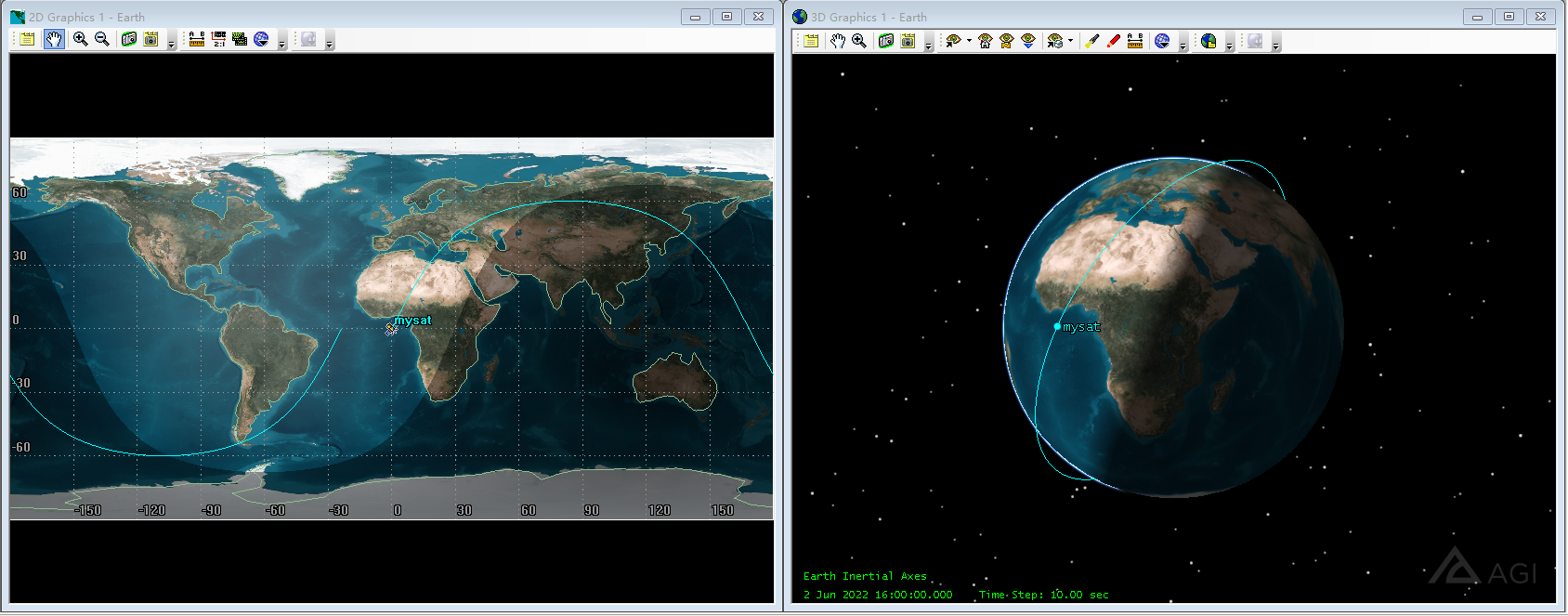
通过matlab运行后,STK生成的“mysat”卫星如图。
创建均匀分布的目标接收机
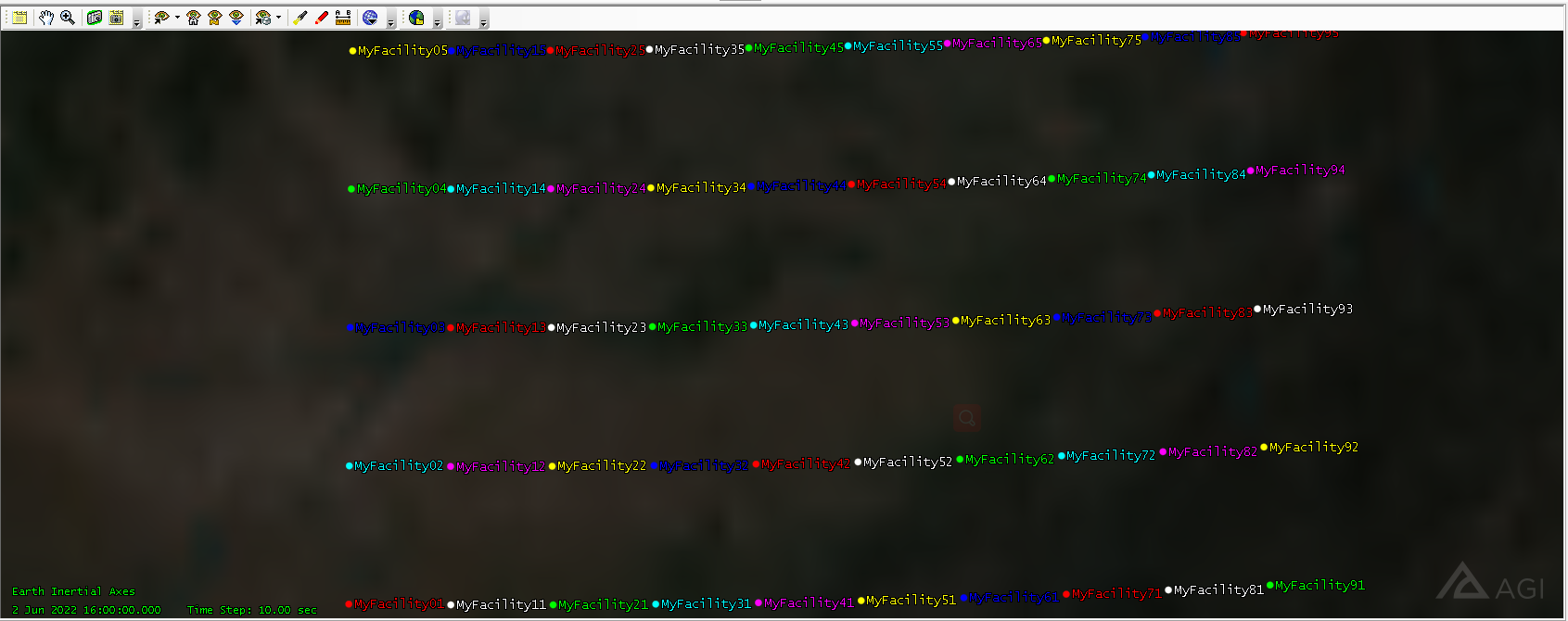
在一个指定的目标区域内,按照每隔0.5个经度和0.5个纬度(每个约50km分布一个监测站),均匀分布着多个Facility、Sensor、Receiver(由于输出多普勒频率只能用transmitter到receiver,所以需要在Facility上附着Sensor和Receiver),这三者属于附着关系,Receiver附着在Sensor上,Sensor附着在Facility上。
首先附上生成的结果图,由图知,监测站等距离均匀地分布在一个正方形区域内,每隔约50km分布一个。
具体创建流程如下:
创建新的Facility并设置参数
首先需要进行for循环,在经纬度方向上个循环10次,也就是说一共在方圆500km内建立100个监测站。root.CurrentScenario.Children.New是建立一个新的Facility。
for Lat=0:9
for lon=0:9
facility = root.CurrentScenario.Children.New('eFacility', ['MyFacility',num2str(lon),num2str(Lat)]);
接着对Facility设置参数,值得一提的是,在对Facility进行位置定义时,facility.Position.AssignGeodetic每次增加0.5个经度/纬度。
facility.Position.AssignGeodetic(41.9849+Lat*0.5,120.4039+lon*0.5,0) % Latitude, Longitude, Altitude
% Set altitude to height of terrain
facility.UseTerrain = true;
% Set altitude to a distance above the ground
facility.HeightAboveGround = .05; % km
创建新的Sensor并设置参数
创建新的Sensor的语句是:
sensor = facility.Children.New('eSensor',['MySensor',num2str(lon),num2str(Lat)]);
我们发现,如果单纯用该语句,那么sensor的视图会很难看,因此,我们需要关闭这个sight,但是由于找不到如何关闭,所以,只能接下来设置一下Constraints了,将Sensor的range_Max设置为0.
故代码如下:
senConstraints = sensor.AccessConstraints;
altitude = senConstraints.AddConstraint('eCstrRange');%file:///E:/Program%20Files/AGI/STK%2011/Help/Programming/index.htm#DocX/STKObjects~IAgSensor.html?Highlight=sensor.AccessConstraints
altitude.EnableMax = true;
altitude.Max = 0;
% 可算出来了,设置了sensor的Constraints中的Range参数,让他为0,这样sensor就不会是个圆锥型了
% IAgAccessConstraintCollection Collection
% 对于sensor常规参数的修改,参考网址是:file:///E:/Program%20Files/AGI/STK%2011/Help/Programming/index.htm#DocX/STKObjects~IAgAccessConstraintCollection.html?Highlight=eCstrLunarElevationAngle%20eCstrLighting
%STK开发如果没有头绪,一个是查帮助,另一个就是用get、invoke查看相关信息。所以,可以上get
代码不多,但是很费力地才运行成功。
创建新的Receiver并设置参数
设置Receiver的最大接收范围是5000km,仰角为5°
receiver = sensor.Children.New('eReceiver', ['MyReceiver',num2str(lon),num2str(Lat)]);
%设置地面站约束
facConstraints = receiver.AccessConstraints;
%设置最大距离约束
rangeCstr = facConstraints.AddConstraint('eCstrRange');
rangeCstr.EnableMax = 1;
rangeCstr.Max = 2000;
%设置仰角约束
elevationCstr = facConstraints.AddConstraint('eCstrElevationAngle');
elevationCstr.EnableMin = 1;
elevationCstr.Min = 5;
创建Access分析
sat2rec=receiver.GetAccessToObject(Transmitter);
sat2rec.ComputeAccess;
end
end
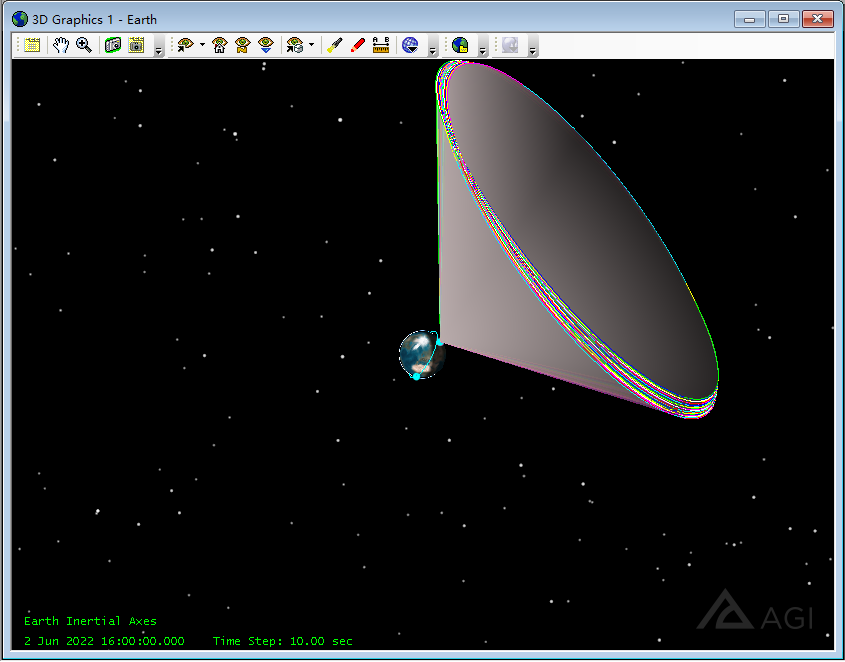
最终生成的结果如下,视频中所展示的那样
<video id=“video” controls=""src=“https://pdswsj.oss-cn-beijing.aliyuncs.com/img/20220605_193050.mp4” preload=“none”>
卫星相对于目标接收机的距离/速度/加速度/多普勒频率的计算
获取的方法包括使用STK逐一计算和使用MATLAB自动化获取两种方法
使用STK逐一计算方法
选择:Analysis-Access,在Access for中选择“mysat”,任意选择一个MyFacility,这里拟选择“MyFacility00”,然后单击“Report & Graph Manager…”,在右边“Styles”中选择AER,可以生成详细报告和图表
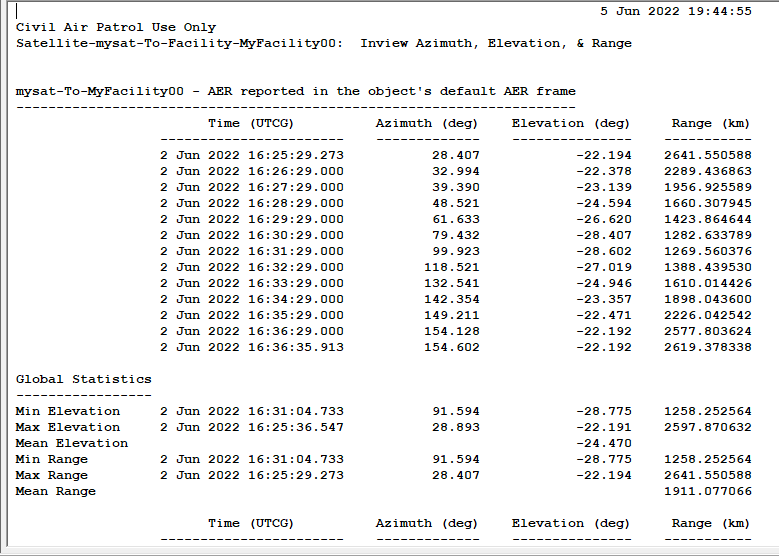
此外,选择任意transmitter和receiver还可以产生多普勒频率的仿真值,使用的是“Link Budget - detailed”这个Styles
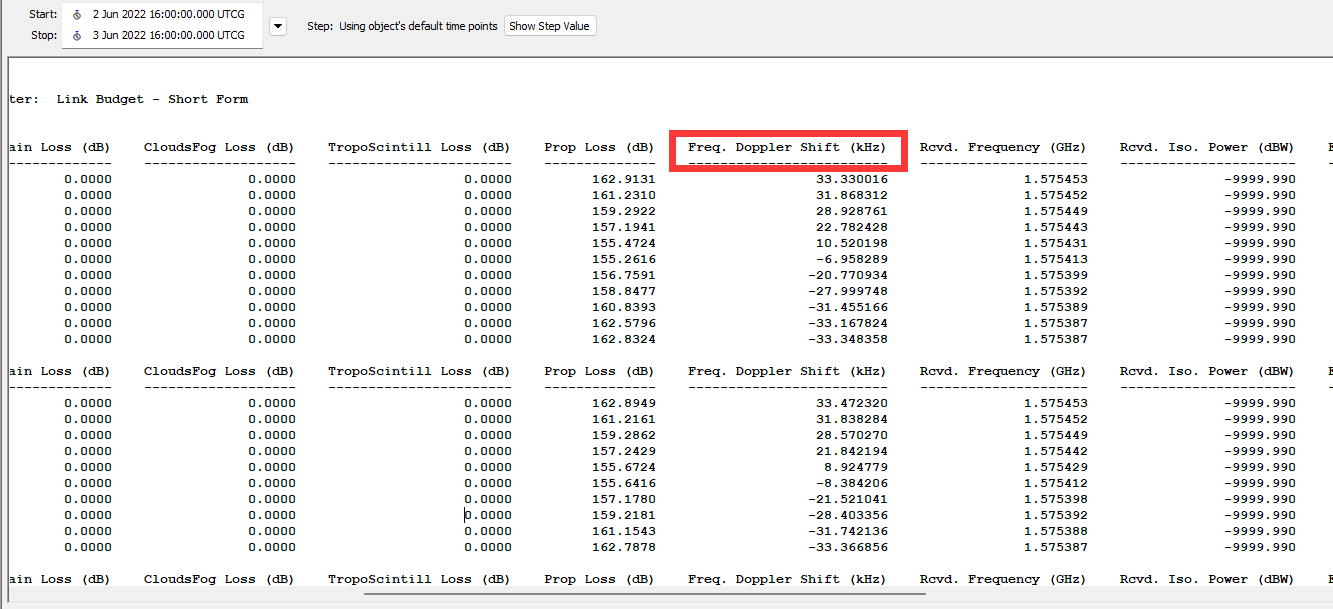
如上图所示。
使用MATLAB自动化获取report
正在学习,下周更新……
——————————————————————————————————————
更新:
使用MATLAB自动化获取report
实现MATLAB自动化需要以下几步:
计算卫星可见性次数
使用前文定义的sat2fac对象,根据STK提供的接口(IAgStkAccess Interface):
acc_interval = sat2fac.ComputedAccessIntervalTimes;
%可见次数如下
count=acc_interval.Count;
计算出在一天时间内卫星可见次数。
获取卫星可见性数据
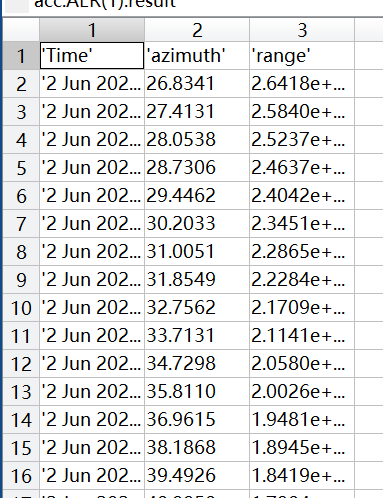
可见性数据包括各个时刻(分辨率为10秒),卫星相对于地面站的仰角,距离等要素。
acc.AER(lon*10+Lat).result(1,:)={'Time' 'azimuth' 'range'};
sum=0;
for i=0:count-1
[str,sto] = acc_interval.GetInterval(i);
%结合上篇博文,获取第一个可见弧段内的方位角
aerDP = sat2fac.DataProviders.Item('AER Data').Group.Item('VVLH CBF').Exec(str,sto,10);
azimuth = cell2mat(aerDP.DataSets.GetDataSetByName('Azimuth').GetValues);
range = cell2mat(aerDP.DataSets.GetDataSetByName('Range').GetValues);
time = aerDP.DataSets.GetDataSetByName('Time').GetValues;
len=length(range);
for j=1:len
acc.AER(lon*10+Lat).result(j+1+sum,:)={time(j) azimuth(j) range(j)};
end
sum=sum+len;
end
实验结果
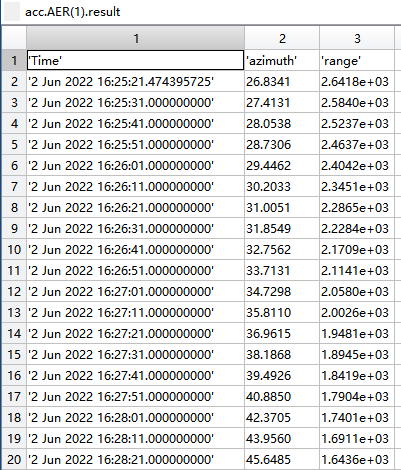
MATLAB结构体数据
我们讲个地面站与卫星的参数保存为一个结构体,字段1代表Facility01地面站相对于卫星Sat的各个可见时刻的数据信息。如图所示:
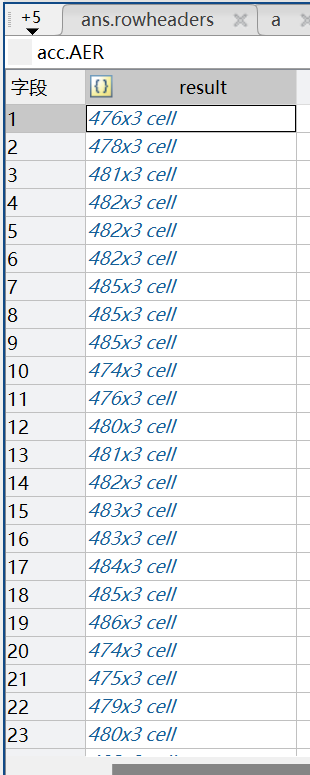
该图就是Facility01地面站相对于卫星Sat的各个可见时刻的具体数据信息。
实验效果视频
实验全流程视频如下
<video id=“video” controls=""src=“https://pdswsj.oss-cn-beijing.aliyuncs.com/img/20220612_181543.mp4” preload=“none”>
实验代码
写了一晚上程序,可以实现这个目标了,先附上最终代码
clear all
clc
app = actxserver('STK11.application');
root = app.Personality2;
scenario = root.Children.New('eScenario','MATLAB_PredatorMission');
root.SaveScenarioAs('E:\Program Files\STK\Documents\STK 11 (x64)\Scenario1_jz2');
scenario.SetTimePeriod('2 Jun 2022 16:00:00.000','3 Jun 2022 16:00:00.000');
scenario.StartTime = '2 Jun 2022 16:00:00.000';
scenario.StopTime = '3 Jun 2022 16:00:00.000';
root.ExecuteCommand('Animate * Reset');
%facility = scenario.Children.New('eFacility','GroundStation');
% areaTarget = root.CurrentScenario.Children.New('eAreaTarget', 'MyAreaTarget');
% root.BeginUpdate();
% areaTarget.AreaType = 'eEllipse';
% ellipse = areaTarget.AreaTypeData;
% %ellipse.Add(48.897, 18.637);
% ellipse.SemiMajorAxis = 85.25; % in km (distance dimension)
% ellipse.SemiMinorAxis = 85.25; % in km (distance dimension)
% ellipse.Bearing = 44; % in deg (angle dimension)
% root.EndUpdate();
sat = scenario.Children.New(18,'mysat');
kep = sat.Propagator.InitialState.Representation.ConvertTo('eOrbitStateClassical');
kep.SizeShapeType = 'eSizeShapeAltitude';
kep.LocationType = 'eLocationTrueAnomaly';
kep.Orientation.AscNodeType = 'eAscNodeLAN';
kep.SizeShape.PerigeeAltitude = 500;
kep.SizeShape.ApogeeAltitude = 500;
kep.Orientation.Inclination = 60;
kep.Orientation.ArgOfPerigee = 0;
kep.Orientation.AscNode.Value = 0;
kep.Location.Value = 0;
sat.Propagator.InitialState.Representation.Assign(kep);
sat.Propagator.Propagate;
sensor = sat.Children.New('eSensor','MySensor_sat');
Transmitter = sensor.Children.New('eTransmitter', 'Mytransmitter');
Transmitter.SetModel('GPS Satellite Transmitter Model');
%建立卫星对象,并设置参数
% satellite = root.CurrentScenario.Children.New('eSatellite', 'MySatellite');
% scenPath = 'E:\Program Files\STK\Documents\STK 11 (x64)\Scenario1_learn3';
% satelliteFilePath = [scenPath '\ISS_25544.sa'];
% satellite.ExportTools.GetEphemerisStkExportTool.Export(satelliteFilePath);
% IAgFacility facility: Facility Object
for Lat=0:9
for lon=0:9
if lon~=0 | Lat~=0
facility = root.CurrentScenario.Children.New('eFacility', ['MyFacility',num2str(lon),num2str(Lat)]);
facility.Position.AssignGeodetic(41.9849+Lat*0.5,120.4039+lon*0.5,0) % Latitude, Longitude, Altitude
% Set altitude to height of terrain
facility.UseTerrain = true;
% Set altitude to a distance above the ground
facility.HeightAboveGround = .05; % km
sensor = facility.Children.New('eSensor',['MySensor',num2str(lon),num2str(Lat)]);
% pattern1 = sensor.Pattern;
% sensor.FieldOfView
senConstraints = sensor.AccessConstraints;
altitude = senConstraints.AddConstraint('eCstrRange');%file:///E:/Program%20Files/AGI/STK%2011/Help/Programming/index.htm#DocX/STKObjects~IAgSensor.html?Highlight=sensor.AccessConstraints
altitude.EnableMax = true;
altitude.Max = 0;
% 可算出来了,设置了sensor的Constraints中的Range参数,让他为0,这样sensor就不会是个圆锥型了
% IAgAccessConstraintCollection Collection
% 对于sensor常规参数的修改,参考网址是:file:///E:/Program%20Files/AGI/STK%2011/Help/Programming/index.htm#DocX/STKObjects~IAgAccessConstraintCollection.html?Highlight=eCstrLunarElevationAngle%20eCstrLighting
%STK开发如果没有头绪,一个是查帮助,另一个就是用get、invoke查看相
%关信息。所以,上get
% pattern1.ConeAngle = 85;
receiver = sensor.Children.New('eReceiver', ['MyReceiver',num2str(lon),num2str(Lat)]);
%设置地面站约束
facConstraints = receiver.AccessConstraints;
%设置最大距离约束
rangeCstr = facConstraints.AddConstraint('eCstrRange');
rangeCstr.EnableMax = 1;
rangeCstr.Max = 2000;
%设置仰角约束
elevationCstr = facConstraints.AddConstraint('eCstrElevationAngle');
elevationCstr.EnableMin = 1;
elevationCstr.Min = 5;
sat2fac=sat.GetAccessToObject(facility);
sat2fac.ComputeAccess;
% aerDP = sat2fac.DataProviders.Item('AER Data').Group.Item('VVLH CBF').Exec(scenario.StartTime,scenario.StopTime,60);
% azimuth = cell2mat(aerDP.DataSets.GetDataSetByName('Range').GetValues);
acc_interval = sat2fac.ComputedAccessIntervalTimes;
%可见次数如下
count=acc_interval.Count;
%可见的弧段起始时间列表
%acc_interval.ToArray(0,-1)
%str、sto分别是第一个弧段的起始时间,是字符串类型。
acc.AER(lon*10+Lat).result(1,:)={'Time' 'azimuth' 'range'};
sum=0;
for i=0:count-1
[str,sto] = acc_interval.GetInterval(i);
%结合上篇博文,获取第一个可见弧段内的方位角
aerDP = sat2fac.DataProviders.Item('AER Data').Group.Item('VVLH CBF').Exec(str,sto,10);
azimuth = cell2mat(aerDP.DataSets.GetDataSetByName('Azimuth').GetValues);
range = cell2mat(aerDP.DataSets.GetDataSetByName('Range').GetValues);
time = aerDP.DataSets.GetDataSetByName('Time').GetValues;
len=length(range);
for j=1:len
acc.AER(lon*10+Lat).result(j+1+sum,:)={time(j) azimuth(j) range(j)};
end
sum=sum+len;
end
end
end
end
% satellite = root.GetObjectFromPath('/Satellite/mysat');
% receiver = root.GetObjectFromPath('/Facility/MyFacility99');
% senConstraints = sensor.AccessConstraints;
% altitude = senConstraints.AddConstraint('eCstrAltitude');%file:///E:/Program%20
% % Files/AGI/STK%2011/Help/Programming/index.htm#DocX/STKObjects~IAgSensor.html?Highlight=sensor.AccessConstraints
% altitude.EnableMax = true;
% altitude.Max = 2;
% AER()
% 对于sensor常规参数的修改,参考网址是:file:///E:/Program%20Files/AGI/STK%2011/Help/Programming/index.htm#DocX/STKObjects~IAgAccessConstraintCollection.html?Highlight=eCstrLunarElevationAngle%20eCstrLighting
各个站点的结果输出在了一个结构体中,每个结构体包含以下三种元素(time azimuth range),其中range就是星地间距离,可以作为整个系统的 输出。数据保存在这个链接,下载即可查看https://pdswsj.oss-cn-beijing.aliyuncs.com/img/matlab.mat