文章目录
1. 简明误差卡尔曼滤波器(ESKF)及其推导过程
简介
本文主要介绍一种特殊正交群
SO(3)
\text{SO(3)}
SO(3) 上的ESKF(Error State Kalman Filter, 误差卡尔曼滤波器)(有时也叫做流形上的ESKF)推导过程。
ESKF基本过程及优点
在现代的大多数IMU系统中,人们往往使用误差状态卡尔曼滤波器(Error State Kalman Filter, ESKF),而非原始状态的卡尔曼滤波器。大部分基于滤波器的LIO或VIO实现,都使用ESKF作为状态估计方法。
相比于传统KF,ESKF的优点如下:
- 在旋转的处理上,
ESKF的状态变量可以采用最小化的参数表达,也就是使用三维变量来表达旋转的增量。而传统的KF则需要使用四元数( 4 4 4维)或更高维的表达(旋转矩阵, 9 9 9维),要不就得采用带奇异性的表达方式(欧拉角)。 ESKF总是在原点附近,距离奇异点较远,并且也不会由于离工作点太远而导致线性化近似不够的问题。ESKF的状态量为小量,其二阶变量相对来说可以忽略。同时大多数雅可比矩阵在小量情况下变得非常简单,甚至可以用单位阵代替。- 误差状态的运动学也相比原状态变量要来的更小,因为我们可以把大量更新部分放到原状态变量中。
在ESKF中,我们通常把原状态变量称为名义状态变量(Norminal State),把ESKF中的状态变量称为误差状态变量(Error State)。
ESKF整体流程如下:
- 当
IMU测量数据到达时,首先将其积分后,放入名义状态变量中。 - 由于这种做法没有考虑噪声,其结果自然会快速漂移。于是我们希望把误差部分作为误差变量,放入
ESKF中。 ESKF内部会考虑各种噪声和零偏的影响,并且给出误差状态的一个 高斯分布 描述。同时ESKF本身作为一种卡尔曼滤波器,也具有预测过程和修正过程。其中 修正过程 需要依赖IMU以外的传感器观测。在修正后,ESKF可以给出 后验的误差高斯分布。- 随后,我们将这部分误差放入
名义状态变量中,并把ESKF置零,这样就完成了一次循环。
ESKF参数含义
连续时间上的 ESKF状态方程
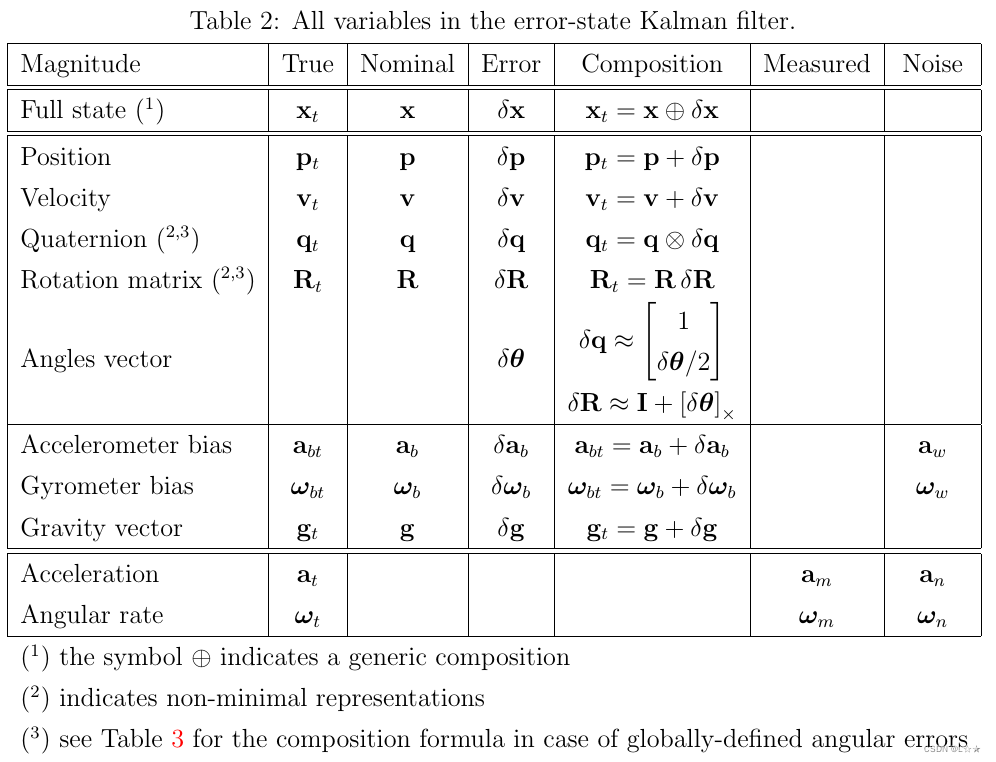
我们设ESKF的真值状态为:
x
t
=
[
p
t
,
v
t
,
R
t
,
b
a
t
,
b
g
t
,
g
t
]
T
x_t = [p_t, v_t,R_t,b_{at},b_{gt},g_t]^\text{T}
xt=[pt,vt,Rt,bat,bgt,gt]T
这个状态随时间改变,可以记为
x
(
t
)
t
x(t)_t
x(t)t。
在连续时间上,我们记IMU读数为
ω
~
,
a
~
\tilde{\omega}, \tilde{a}
ω~,a~,那么可以写出状态变量导数 相对于 观测量之间的关系式:
p
t
˙
=
v
t
(1 a)
\dot{p_t} = v_t \tag{1 a}
pt˙=vt(1 a)
v ˙ t = R t ( a ~ − b a t − η a ) + g (1 b) \dot{v}_t = R_t(\tilde{a} - b_{at} -\eta_a) + g \tag {1 b} v˙t=Rt(a~−bat−ηa)+g(1 b)
R ˙ t = R t ( ω ~ − b g t − η g ) ∧ (1 c) \dot{R}_t = R_t(\tilde{\omega} - b_{gt} - \eta_g)^{\wedge} \tag{1 c} R˙t=Rt(ω~−bgt−ηg)∧(1 c)
b ˙ g t = η b g (1 d) \dot{b}_{gt} = \eta_{bg} \tag{1 d} b˙gt=ηbg(1 d)
b ˙ a t = η b a (1 e) \dot{b}_{at} = \eta_{ba} \tag{1 e} b˙at=ηba(1 e)
g ˙ = 0 (1 f) \dot{g} = 0 \tag{1 f} g˙=0(1 f)
其中,带下标 t t t 的表示真值。
这里把重力
g
g
g 考虑进来的主要理由是方便确定IMU的初始姿态。
-
如果我们不在状态方程里写出重力变量,那么就必须事先确定初始时刻的
IMU朝向 R ( 0 ) R(0) R(0),才能执行后续的计算。此时IMU的姿态就是相对于初始的水平面来描述的。 -
而如果把重力写出来,就可以设
IMU的初始姿态为单位矩阵 R = I R = I R=I,而把重力方向作为IMU当前姿态相对于水平面的一个度量。
两种方法都是可行的,不过将重力方向单独表达出来会使初始状态表达更为简单,同时还可以增加一些线性性。
如果把观测量 和 噪声量 整理成一个向量,我们也可以把上式整理成矩阵形式。不过这里的矩阵形式将含有很多的 零项,相比于上式不会有明显的简化,所以这里采用散开的公式表示。
误差状态方程推导
下面我们推导误差状态方程。首先定义误差状态变量为:
p
t
=
p
+
δ
p
(2 a)
p_t = p + \delta p \tag{2 a}
pt=p+δp(2 a)
v t = v + δ v (2 b) v_t = v + \delta v \tag{2 b} vt=v+δv(2 b)
R t = R δ R 或 q t = q δ q (2 c) R_t = R\delta R \space \space 或 \space\space q_t = q \delta q \tag{2 c} Rt=RδR 或 qt=qδq(2 c)
b g t = b g + δ b g (2 d) b_{gt} = b_g + \delta b_g \tag{2 d} bgt=bg+δbg(2 d)
b a t = b a + δ b a (2 e) b_{at} = b_a + \delta b_a \tag{2 e} bat=ba+δba(2 e)
g t = g + δ g (2 f) g_t = g + \delta g \tag{2 f} gt=g+δg(2 f)
其中,不带下标的就是名义状态变量。名义状态变量 的运动学方程 与真值相同,只是 不需要考虑噪声(因为噪声在误差状态方程中考虑了) 。 其中旋转部分的
δ
R
\delta R
δR 可以用它的李代数
Exp
(
δ
θ
)
\text{Exp}(\delta \theta)
Exp(δθ)来表示,此时旋转公式也需要改成用指数形式来表达。
关于误差变量的平移、零偏和重力公式,都很容易的而出对应的时间导数表达式,只需要在等式两侧分别对时间求导即可:
δ
p
˙
=
δ
v
(3 a)
\delta \dot{p} = \delta v \tag{3 a}
δp˙=δv(3 a)
δ b g ˙ = η g (3 b) \delta \dot{b_g} = \eta_g \tag{3 b} δbg˙=ηg(3 b)
δ b a ˙ = η a (3 c) \delta \dot{b_a} = \eta_a \tag{3 c} δba˙=ηa(3 c)
δ g = 0 (3 d) \delta g = 0 \tag{3 d} δg=0(3 d)
而速度、旋转两式由于和 δ R \delta R δR有关系,所以需要单独推导。
误差状态的旋转项
对旋转式两侧求时间导数,可得:
R
˙
t
=
R
˙
Exp
(
δ
θ
)
+
R
Exp
(
δ
θ
)
˙
=
R
t
(
ω
~
−
b
g
t
−
η
g
)
∧
(4)
\begin{aligned} \dot{R}_t &= \dot{R}\text{Exp}(\delta \theta) + R \dot{\text{Exp}(\delta \theta)} \\ &=R_t(\tilde{\omega} - b_{gt} -\eta_g)^{\wedge } \end{aligned} \tag{4}
R˙t=R˙Exp(δθ)+RExp(δθ)˙=Rt(ω~−bgt−ηg)∧(4)
该式右侧的
Exp
(
δ
θ
)
˙
\dot{\text{Exp}(\delta \theta)}
Exp(δθ)˙ 满足:
Exp
(
δ
θ
)
˙
=
Exp
(
δ
θ
)
δ
θ
˙
∧
(5)
\dot{\text{Exp}(\delta \theta)} = \text{Exp}(\delta \theta) \delta \dot{\theta}^{\wedge } \tag{5}
Exp(δθ)˙=Exp(δθ)δθ˙∧(5)
因此,公式(4)中第一个式子可以写成:
R
˙
Exp
(
δ
θ
)
+
R
Exp
(
δ
θ
)
˙
=
R
(
ω
~
−
b
g
)
∧
Exp
(
δ
θ
)
+
R
Exp
(
δ
θ
)
δ
θ
˙
∧
(6)
\dot{R}\text{Exp}(\delta \theta) + R \dot{\text{Exp}(\delta \theta)} = R(\tilde{\omega} - b_{g})^{\wedge} \text{Exp}(\delta \theta) + R\text{Exp}(\delta \theta) \delta\dot{\theta} ^{\wedge } \tag{6}
R˙Exp(δθ)+RExp(δθ)˙=R(ω~−bg)∧Exp(δθ)+RExp(δθ)δθ˙∧(6)
而 第二个式子可以写成:
R t ( ω ~ − b g t − η g ) ∧ = R Exp ( δ θ ) ( ω ~ − b g t − η g ) ∧ (7) R_t(\tilde{\omega} - b_{gt} -\eta_g)^{\wedge } = R\text{Exp}(\delta \theta)(\tilde{\omega} - b_{gt} -\eta_g)^{\wedge } \tag{7} Rt(ω~−bgt−ηg)∧=RExp(δθ)(ω~−bgt−ηg)∧(7)
比较公式(6)、(7),将 δ θ ˙ \delta \dot{\theta} δθ˙ 移到一侧,约掉两侧左边的 R R R ,整理类似项,不难得到:
Exp
(
δ
θ
)
δ
θ
˙
∧
=
Exp
(
δ
θ
)
(
ω
~
−
b
g
t
−
η
g
)
∧
−
(
ω
~
−
b
g
)
∧
Exp
(
δ
θ
)
(8)
\text{Exp}(\delta \theta) \delta\dot{\theta} ^{\wedge } = \text{Exp}(\delta \theta)(\tilde{\omega} - b_{gt} -\eta_g)^{\wedge }- (\tilde{\omega} - b_{g})^{\wedge} \text{Exp}(\delta \theta) \tag{8}
Exp(δθ)δθ˙∧=Exp(δθ)(ω~−bgt−ηg)∧−(ω~−bg)∧Exp(δθ)(8)
注意到
Exp
(
δ
θ
)
\text{Exp}(\delta \theta)
Exp(δθ) 本身是一个
SO(3)
\text{SO(3)}
SO(3) 矩阵,我们利用
SO(3)
\text{SO(3)}
SO(3) 上的伴随性质:
ϕ
∧
R
=
R
(
R
T
ϕ
)
∧
(9)
\phi ^{\wedge} R = R (R^{\text{T}} \phi )^{\wedge } \tag{9}
ϕ∧R=R(RTϕ)∧(9)
来交换公式(8)中的
Exp
(
δ
θ
)
\text{Exp}(\delta \theta)
Exp(δθ) :
Exp
(
δ
θ
)
δ
θ
˙
∧
=
Exp
(
δ
θ
)
(
ω
~
−
b
g
t
−
η
g
)
∧
−
Exp
(
δ
θ
)
Exp
(
−
δ
θ
)
(
ω
~
−
b
g
)
∧
=
Exp
(
δ
θ
)
[
(
ω
~
−
b
g
t
−
η
g
)
∧
−
Exp
(
−
δ
θ
)
(
ω
~
−
b
g
)
∧
]
≈
Exp
(
δ
θ
)
[
(
ω
~
−
b
g
t
−
η
g
)
∧
−
(
(
I
−
δ
θ
∧
)
(
ω
~
−
b
g
)
)
∧
]
=
Exp
(
δ
θ
)
[
b
g
−
b
g
t
−
η
g
+
δ
θ
∧
ω
~
−
δ
θ
∧
b
g
]
∧
=
Exp
(
δ
θ
)
[
(
−
ω
~
+
b
g
)
∧
δ
θ
−
δ
b
g
−
η
g
]
∧
(10)
\begin{aligned} \text{Exp}(\delta \theta) \delta\dot{\theta} ^{\wedge } &= \text{Exp}(\delta \theta)(\tilde{\omega} - b_{gt} -\eta_g)^{\wedge } - \text{Exp}(\delta \theta) \text{Exp}(-\delta \theta) (\tilde{\omega} - b_{g})^{\wedge} \\ &= \text{Exp}(\delta \theta) \left [ (\tilde{\omega} - b_{gt} -\eta_g)^{\wedge } - \text{Exp}(-\delta \theta) (\tilde{\omega} - b_{g})^{\wedge} \right] \\ &\approx \text{Exp}(\delta \theta) \left [ (\tilde{\omega} - b_{gt} -\eta_g)^{\wedge } - \left ((I-\delta \theta ^{\wedge}) (\tilde{\omega} - b_{g}) \right )^{\wedge} \right] \\ &= \text{Exp}(\delta \theta) \left [ b_{g} - b_{gt} - \eta_g + \delta \theta ^{\wedge}\tilde{\omega} - \delta \theta ^{\wedge}b_{g} \right] ^{\wedge } \\ &= \text{Exp}(\delta \theta) \left [ (-\tilde{\omega} + b_{g})^{\wedge} \delta \theta - \delta b_{g} - \eta_g \right] ^{\wedge } \end{aligned} \tag{10}
Exp(δθ)δθ˙∧=Exp(δθ)(ω~−bgt−ηg)∧−Exp(δθ)Exp(−δθ)(ω~−bg)∧=Exp(δθ)[(ω~−bgt−ηg)∧−Exp(−δθ)(ω~−bg)∧]≈Exp(δθ)[(ω~−bgt−ηg)∧−((I−δθ∧)(ω~−bg))∧]=Exp(δθ)[bg−bgt−ηg+δθ∧ω~−δθ∧bg]∧=Exp(δθ)[(−ω~+bg)∧δθ−δbg−ηg]∧(10)
约掉公式(10)等式左侧的系数,可得:
δ θ ˙ ≈ − ( ω ~ − b g ) ∧ δ θ − δ b g − η g (11) \delta\dot{\theta} \approx -(\tilde{\omega} - b_{g})^{\wedge} \delta \theta - \delta b_{g} - \eta_g \tag{11} δθ˙≈−(ω~−bg)∧δθ−δbg−ηg(11)
误差状态的速度项
接下来考虑速度方程的误差形式。同样地,对两侧求时间导数,就可以得到
δ
v
˙
\delta \dot{v}
δv˙ 的表达式。等式左侧为:
v
˙
t
=
R
t
(
a
~
−
b
a
t
−
η
a
)
+
g
t
=
R
Exp
(
δ
θ
)
(
a
~
−
b
a
−
δ
b
a
−
η
a
)
+
g
+
δ
g
≈
R
(
I
+
δ
θ
∧
)
(
a
~
−
b
a
−
δ
b
a
−
η
a
)
+
g
+
δ
g
≈
R
a
~
−
R
b
a
−
R
δ
b
a
−
R
η
a
+
R
δ
θ
∧
a
−
R
δ
θ
∧
b
a
+
g
+
δ
g
=
R
a
~
−
R
b
a
−
R
δ
b
a
−
R
η
a
−
R
a
~
∧
δ
θ
+
R
b
a
∧
δ
θ
+
g
+
δ
g
(12)
\begin{aligned} \dot{v}_t &= R_t(\tilde{a} - b_{at} -\eta_a) + g_t \\ &= R \text{Exp}(\delta \theta) (\tilde{a} - b_{a} - \delta b_a -\eta_a) + g + \delta g \\ &\approx R(I + \delta \theta ^{\wedge})(\tilde{a} - b_{a} - \delta b_a -\eta_a) + g + \delta g \\ &\approx R\tilde{a} - Rb_a - R\delta b_a - R\eta_a + R\delta \theta ^{\wedge} a - R\delta \theta ^{\wedge} b_a + g + \delta g \\ &= R\tilde{a} - Rb_a - R\delta b_a - R\eta_a - R\tilde{a}^{\wedge} \delta \theta + Rb_a^{\wedge} \delta \theta + g + \delta g \end{aligned} \tag{12}
v˙t=Rt(a~−bat−ηa)+gt=RExp(δθ)(a~−ba−δba−ηa)+g+δg≈R(I+δθ∧)(a~−ba−δba−ηa)+g+δg≈Ra~−Rba−Rδba−Rηa+Rδθ∧a−Rδθ∧ba+g+δg=Ra~−Rba−Rδba−Rηa−Ra~∧δθ+Rba∧δθ+g+δg(12)
在公式(12)中,由第三行向第四行推导时,需要忽略
δ
θ
∧
\delta \theta ^{\wedge}
δθ∧ 与
δ
b
a
\delta b_a
δba,
η
a
\eta_a
ηa 相乘的二阶小量。
从第四行推第五行则用到了叉乘符号交换顺序后,需要加负号的性质。
另一方面,等式右侧为:
v
˙
+
θ
v
˙
=
R
(
a
~
−
b
a
)
+
g
+
δ
v
˙
(13)
\dot{v} + \theta\dot{v} =R(\tilde{a} - b_a) + g + \delta \dot{v} \tag{13}
v˙+θv˙=R(a~−ba)+g+δv˙(13)
因为上面两式相等,可以得到:
δ
v
˙
=
−
R
(
a
~
−
b
a
)
∧
δ
θ
−
R
δ
b
a
−
R
η
a
+
δ
g
(14)
\delta \dot{v} = -R(\tilde{a} - b_a)^{\wedge} \delta \theta - R \delta b_a - R \eta_a + \delta g \tag{14}
δv˙=−R(a~−ba)∧δθ−Rδba−Rηa+δg(14)
这样我们就得到了
δ
v
\delta v
δv的运动学模型。
需要补充一句,由于上式中 η a \eta_a ηa 是一个零均值白噪声,它乘上任意旋转矩阵之后,仍然是一个零均值白噪声,而且由于 R T R = I R^{\text{T}}R = I RTR=I,其协方差矩阵也不变。
所以,公式(14)可以简化为:
δ
v
˙
=
−
R
(
a
~
−
b
a
)
∧
δ
θ
−
R
δ
b
a
−
η
a
+
δ
g
(15)
\delta \dot{v} = -R(\tilde{a} - b_a)^{\wedge} \delta \theta - R \delta b_a - \eta_a + \delta g \tag{15}
δv˙=−R(a~−ba)∧δθ−Rδba−ηa+δg(15)
完整误差变量的运动学方程
至此,我们可以把误差变量的运动学方程整理如下:
δ
p
˙
=
δ
v
(16 a)
\delta \dot{p} = \delta v \tag{16 a}
δp˙=δv(16 a)
δ v ˙ = − R ( a ~ − b a ) ∧ δ θ − R δ b a − η a + δ g (16 b) \delta \dot{v} = -R(\tilde{a} - b_a)^{\wedge} \delta \theta - R \delta b_a - \eta_a + \delta g \tag{16 b} δv˙=−R(a~−ba)∧δθ−Rδba−ηa+δg(16 b)
δ θ ˙ ≈ − ( ω ~ − b g ) ∧ δ θ − δ b g − η g (16 c) \delta\dot{\theta} \approx -(\tilde{\omega} - b_{g})^{\wedge} \delta \theta - \delta b_{g} - \eta_g \tag{16 c} δθ˙≈−(ω~−bg)∧δθ−δbg−ηg(16 c)
δ b g ˙ = η g (16 d) \delta \dot{b_g} = \eta_g \tag{16 d} δbg˙=ηg(16 d)
δ b a ˙ = η a (16 e) \delta \dot{b_a} = \eta_a \tag{16 e} δba˙=ηa(16 e)
δ g = 0 (16 f) \delta g = 0 \tag{16 f} δg=0(16 f)
离散时间上的ESKF运动学方程
从连续时间状态方程,推出离散时间的状态方程并不困难,不妨直接来列写它们。
名义状态变量的离散时间运动学方程可以写为:
p
(
t
+
Δ
t
)
=
p
(
t
)
+
v
Δ
t
+
1
2
(
R
(
a
~
−
b
a
)
)
Δ
t
2
+
1
2
g
Δ
t
2
(17 a)
p(t + \Delta t) = p(t) + v \Delta t + \frac{1}{2}(R(\tilde{a} - b_a)) \Delta t^2 + \frac{1}{2}g \Delta t^2 \tag{17 a}
p(t+Δt)=p(t)+vΔt+21(R(a~−ba))Δt2+21gΔt2(17 a)
v ( t + Δ t ) = v ( t ) + R ( a ~ − b a ) ) Δ t + g Δ t (17 b) v(t + \Delta t) = v(t) + R(\tilde{a} - b_a)) \Delta t + g \Delta t \tag{17 b} v(t+Δt)=v(t)+R(a~−ba))Δt+gΔt(17 b)
R ( t + Δ t ) = R ( t ) Exp ( ( ω ~ − b g ) Δ t ) (17 c) R(t + \Delta t) = R(t)\text{Exp}((\tilde{\omega} - b_g) \Delta t) \tag{17 c} R(t+Δt)=R(t)Exp((ω~−bg)Δt)(17 c)
b g ( t + Δ t ) = b g ( t ) (17 d) b_g(t + \Delta t) = b_g(t) \tag{17 d} bg(t+Δt)=bg(t)(17 d)
b a ( t + Δ t ) = b a ( t ) (17 e) b_a(t + \Delta t) = b_a(t) \tag{17 e} ba(t+Δt)=ba(t)(17 e)
g ( t + Δ t ) = g ( t ) (17 f) g(t + \Delta t) = g(t) \tag{17 f} g(t+Δt)=g(t)(17 f)
公式(17) 只需要在上面基础上,添加零偏项和重力项即可。
而误差状态的离散形式,只需要处理连续形态中的旋转部分。参考角速度的积分公式,可以将误差状态方程写为:
δ
p
(
t
+
Δ
t
)
=
δ
p
+
δ
v
Δ
t
(18 a)
\delta p(t + \Delta t) = \delta p + \delta v \Delta t \tag{18 a}
δp(t+Δt)=δp+δvΔt(18 a)
δ v ( t + Δ t ) = δ v + ( − R ( a ~ − b a ) ∧ δ θ − R δ b a + δ g ) Δ t + η v (18 b) \delta v (t + \Delta t) = \delta v + (-R (\tilde{a} - b_a)^{\wedge} \delta \theta - R \delta b_a + \delta g) \Delta t + \eta_v \tag{18 b} δv(t+Δt)=δv+(−R(a~−ba)∧δθ−Rδba+δg)Δt+ηv(18 b)
δ θ ( t + Δ t ) = Exp ( − ( ω − b a ~ ) Δ t ) δ θ − δ b g Δ t − η θ (18 c) \delta \theta(t + \Delta t) = \text{Exp}(-(\tilde{\omega - b_a}) \Delta t) \delta \theta - \delta b_g \Delta t - \eta_\theta \tag{18 c} δθ(t+Δt)=Exp(−(ω−ba~)Δt)δθ−δbgΔt−ηθ(18 c)
δ b g ( t + Δ t ) = δ b g + η g (18 d) \delta b_g (t + \Delta t) = \delta b_g + \eta_g \tag{18 d} δbg(t+Δt)=δbg+ηg(18 d)
δ b a ( t + Δ t ) = δ b a + η a (18 e) \delta b_a (t + \Delta t) = \delta b_a + \eta_a \tag{18 e} δba(t+Δt)=δba+ηa(18 e)
δ g ( t + Δ t ) = δ g (18 f) \delta g (t + \Delta t) = \delta g \tag{18 f} δg(t+Δt)=δg(18 f)
公式(18)中,需要注意的是:
- 右侧部分省略了括号里的 ( t ) (t) (t) 以简化公式;
- 关于旋转部分的积分,我们可以将连续形式 看成关于 δ θ \delta \theta δθ 的微分方程,然后求解。求解过程类似于对角速度进行积分;
- 噪声项不参与递推,需要把它们单独归入噪声部分中。连续时间的噪声项可以视为随机过程中的能量谱密度,而离散时间下的噪声变量就是我们日常看到的随机变量了。这些噪声随机变量的标准差可以列写如下:
σ ( η v ) = Δ t σ a , σ ( η θ ) = Δ t σ g , σ ( η g ) = Δ t η b g , σ ( η a ) = Δ t σ b a (19) \sigma (\eta_v) = \Delta t \sigma_a , \space \space \sigma (\eta _\theta) = \Delta t \sigma _g, \space \space \sigma (\eta _g) = \sqrt{\Delta t} \eta _{bg}, \space \space \sigma (\eta _a) = \sqrt{\Delta t} \sigma _{ba} \tag{19} σ(ηv)=Δtσa, σ(ηθ)=Δtσg, σ(ηg)=Δtηbg, σ(ηa)=Δtσba(19)
其中,前两式中的 Δ t \Delta t Δt是由积分关系导致的。
至此,我们给出了如何在ESKF中进行IMU递推的过程,对应于卡尔曼滤波器中的状态方程。
为了让滤波器收敛,我们通常需要外部的观测来对卡尔曼滤波器进行修正,也就是所谓的组合导航。当然,组合导航的方法有很多,从传统的EKF,到本节介绍的ESKF,以及预积分和图优化技术,都可以应用于组合导航中。
ESKF的运动过程
根据上述讨论,我们可以写出ESKF的运动过程。
误差状态变量
δ
x
\delta x
δx 的离散时间运动方程已经在上式给出,我们可以整体地记为:
δ
x
=
f
(
δ
x
)
+
w
,
w
∼
N
(
0
,
Q
)
(20)
\delta x = f (\delta x) + w, \space w \sim \mathcal{N}(0, Q) \tag {20}
δx=f(δx)+w, w∼N(0,Q)(20)
其中,
w w w为噪声,
按照之前定义,
Q
Q
Q应该为:
Q
=
diag
(
0
3
,
Cov
(
η
v
)
,
Cov
(
η
θ
)
,
Cov
(
η
g
)
,
Cov
(
η
a
)
,
0
3
)
(21)
Q = \text{diag}\left ( 0_3, \text{Cov}(\eta _v), \text{Cov}(\eta_\theta), \text{Cov}(\eta_g), \text{Cov}(\eta_a), 0_3 \right) \tag{21}
Q=diag(03,Cov(ηv),Cov(ηθ),Cov(ηg),Cov(ηa),03)(21)
两侧的零是由于第一个和最后一个方程,本身没有噪声导致的。
为了保持与EKF的符号通一,我们计算运动方程的线性化形式:
δ
x
=
F
δ
x
+
w
(22)
\delta x = \boldsymbol{F} \delta x + w \tag{22}
δx=Fδx+w(22)
其中,
F
\boldsymbol{F}
F为线性化后的雅可比矩阵。
由于我们列写的运动方程以及是线性化的了,只需要把他么的线性系统拿出来即可:
F
=
[
I
I
Δ
t
0
0
0
0
0
I
−
R
(
a
~
−
b
a
)
∧
Δ
t
−
R
Δ
t
0
I
Δ
t
0
0
Exp
(
−
(
ω
~
−
b
g
)
Δ
t
)
0
−
I
Δ
t
0
0
0
0
I
0
0
0
0
0
0
I
0
0
0
0
0
0
I
]
(23)
\boldsymbol{F} = \begin{bmatrix} I & I\Delta t & 0 & 0 & 0 & 0 \\ 0 & I & -R(\tilde{a} - b_a)^{\wedge} \Delta t & -R \Delta t & 0 & I \Delta t \\ 0 & 0 & \text{Exp}(-(\tilde{\omega} - b_g) \Delta t) & 0 & -I\Delta t & 0 \\ 0 & 0 & 0 & I & 0 & 0 \\ 0 & 0 & 0 & 0 & I & 0 \\ 0 & 0 & 0 & 0 & 0 & I \end{bmatrix} \tag{23}
F=⎣⎢⎢⎢⎢⎢⎢⎡I00000IΔtI00000−R(a~−ba)∧ΔtExp(−(ω~−bg)Δt)0000−RΔt0I0000−IΔt0I00IΔt000I⎦⎥⎥⎥⎥⎥⎥⎤(23)
在此基础上,我们执行ESKF的预测过程。预测过程包括对名义状态的预测(IMU积分),以及对误差状态的预测:
δ
x
pred
=
F
δ
x
(24 a)
\delta x_{\text{pred}} = \boldsymbol{F} \delta x \tag{24 a}
δxpred=Fδx(24 a)
P pred = F P F T + Q (24 b) \boldsymbol{P}_{\text{pred}} = \boldsymbol{FPF}^{\text{T}} + \boldsymbol{Q} \tag{24 b} Ppred=FPFT+Q(24 b)
不过,由于ESKF的误差状态,在每次更新以后都会被重置,因此运动方程的均值部分没有太大意义,而方差部分则可以指导整个误差估计的分布情况。
ESKF的更新过程
前面介绍的是ESKF的运动过程,现在我们来考虑更新过程。
假设一个抽象的传感器能够对状态变量产生观测,其观测方式为抽象的
h
h
h ,那么可以写为:
z
=
h
(
x
)
+
v
,
v
∼
N
(
0
,
V
)
(25)
z = h(x) + v, \space v \sim \mathcal{N}(0, \boldsymbol{V}) \tag {25}
z=h(x)+v, v∼N(0,V)(25)
其中,
z z z是观测数据 ,
v v v 是观测噪声,
V \boldsymbol{V} V 为该噪声的协方差矩阵。由于变量里已经有 R R R了,这里我们换个符号。
在传统的EKF中,我们可以直接对观测方程线性化,求出预测方程相对于状态变量的雅可比矩阵 ,进而更新卡尔曼滤波器。
而在ESKF中,我们当前拥有名义状态
x
x
x 以及误差状态
δ
x
\delta x
δx 的估计,且希望更新的是误差状态,因此要计算观测方程,相比于误差状态的雅可比矩阵:
H
=
∂
h
∂
δ
x
(26)
\boldsymbol{H} = \frac{\partial h}{\partial \delta x} \tag{26}
H=∂δx∂h(26)
然后再计算卡尔曼增益,进而计算误差状态的更新过程:
K
=
P
pred
H
T
(
H
P
pred
H
T
+
V
)
−
1
(27 a)
\boldsymbol{K} = \boldsymbol{P}_{\text{pred}} \boldsymbol{H}^{\text{T}} (\boldsymbol{H} \boldsymbol{P}_{\text{pred}} \boldsymbol{H}^{\text{T}} + \boldsymbol{V})^{-1} \tag{27 a}
K=PpredHT(HPpredHT+V)−1(27 a)
δ x = K ( z − h ( x t ) ) (27 b) \delta x = \boldsymbol{K}(z - h(x_t)) \tag{27 b} δx=K(z−h(xt))(27 b)
P = ( I − K H ) P pred (27 c) \boldsymbol{P} = (\boldsymbol{I} - \boldsymbol{KH}) \boldsymbol{P}_{\text{pred}} \tag{27 c} P=(I−KH)Ppred(27 c)
其中,
K \boldsymbol{K} K 为卡尔曼增益,
P pred \boldsymbol{P}_{\text{pred}} Ppred 为预测的协方差矩阵,
最后的 P \boldsymbol{P} P 为修正后的 协方差矩阵。
这里
H
\boldsymbol{H}
H 的计算可以通过链式法则来生成:
H
=
∂
h
∂
x
∂
x
∂
δ
x
(28)
\boldsymbol{H} = \frac{\partial h}{\partial x} \frac{\partial x}{\partial \delta x} \tag{28}
H=∂x∂h∂δx∂x(28)
其中,
第一项,只需要对观测方程进行线性化,
第二项,根据我们之前对状态变量的定义,可以得到:
∂
x
∂
δ
x
=
diag
(
I
3
,
I
3
,
∂
Log
(
R
(
Exp
(
δ
θ
)
)
)
∂
δ
θ
,
I
3
,
I
3
,
I
3
)
(29)
\frac{\partial x}{\partial \delta x} = \text{diag} \left ( \boldsymbol{I}_3, \boldsymbol{I}_3, \frac{\partial \text{Log}(R(\text{Exp}(\delta \theta ) )) }{\partial \delta \theta } , \boldsymbol{I}_3, \boldsymbol{I}_3, \boldsymbol{I}_3 \right ) \tag {29}
∂δx∂x=diag(I3,I3,∂δθ∂Log(R(Exp(δθ))),I3,I3,I3)(29)
其他几种都是平凡的,只有旋转部分,因为
δ
θ
\delta \theta
δθ 定义为
R
R
R得到右称,我们用右称的BCH即可:
∂
Log
(
R
(
Exp
(
δ
θ
)
)
)
∂
δ
θ
=
J
r
−
1
(
R
)
(30)
\frac{\partial \text{Log}(R(\text{Exp}(\delta \theta ) )) }{\partial \delta \theta } = \boldsymbol{J}_{r}^{-1}(\boldsymbol{R}) \tag{30}
∂δθ∂Log(R(Exp(δθ)))=Jr−1(R)(30)
最后,我们可以给每个变量加下标
k
k
k ,表示在
k
k
k 时刻进行状态估计。
ESKF的误差状态后续处理
在经过预测和更新过程之后,我们修正了误差状态的估计。接下来,只需要把误差状态 归入名义状态,然后重置ESKF即可。
归入部分,可以简单地写为:
p
k
+
1
=
p
k
+
δ
p
k
(30 a)
\boldsymbol{p}_{k+1} = \boldsymbol{p}_{k} + \delta \boldsymbol{p}_{k} \tag{30 a}
pk+1=pk+δpk(30 a)
v k + 1 = v k + δ v k (30 b) \boldsymbol{v}_{k+1} = \boldsymbol{v}_{k} + \delta \boldsymbol{v}_{k} \tag{30 b} vk+1=vk+δvk(30 b)
R k + 1 = R k Exp ( δ θ k ) (30 c) \boldsymbol{R}_{k+1} = \boldsymbol{R}_{k}\text{Exp}(\delta \boldsymbol{\theta}_{k}) \tag{30 c} Rk+1=RkExp(δθk)(30 c)
b g , k + 1 = b g , k + δ b g , k (30 d) \boldsymbol{b}_{g,k+1} = \boldsymbol{b}_{g,k} + \delta \boldsymbol{b}_{g,k} \tag{30 d} bg,k+1=bg,k+δbg,k(30 d)
b a , k + 1 = b a , k + δ b a , k (30 e) \boldsymbol{b}_{a,k+1} = \boldsymbol{b}_{a,k} + \delta \boldsymbol{b}_{a,k} \tag{30 e} ba,k+1=ba,k+δba,k(30 e)
g k + 1 = g k + δ g k (30 f) \boldsymbol{g}_{k+1} = \boldsymbol{g}_{k} + \delta \boldsymbol{g}_{k} \tag{30 f} gk+1=gk+δgk(30 f)
有些文献里,也会定义为广义的状态变量加法:
x
k
+
1
=
x
k
⊕
δ
x
k
(31)
\boldsymbol{x}_{k+1} = \boldsymbol{x}_{k} \oplus \delta \boldsymbol{x}_{k} \tag{31}
xk+1=xk⊕δxk(31)
这种写法,可以简化整体的表达式。不过,如果公式里出现太多的广义加减法,可能让人不好马上辨别它们的具体含义,所以本文倾向于将各状态分别写开,或者直接用加法而非广义加法符号。
ESKF的重置分为均值部分 和 协方差部分。
均值部分可以简单地实现为:
δ
x
=
0
(32)
\delta \boldsymbol{x} = \boldsymbol{0} \tag {32}
δx=0(32)
由于均值被重置了,之前我们描述的是关于
x
k
\boldsymbol{x}_{k}
xk 的切空间中的协方差,而现在描述的是
x
k
+
1
\boldsymbol{x}_{k+1}
xk+1 中的协方差。
这次重置会来带来一些微小的差异,主要影响旋转部分。事实上,在重置前,卡尔曼滤波器刻画了
x
pred
\boldsymbol{x}_{\text{pred}}
xpred 切空间处的一个高速分布
N
(
δ
x
,
P
)
\mathcal{N}(\delta \boldsymbol{x}, \boldsymbol{P})
N(δx,P),而重置之后,应该刻画
x
pred
⊞
δ
x
\boldsymbol{x}_{\text{pred}} \boxplus \delta \boldsymbol{x}
xpred⊞δx 处的一个
N
(
δ
x
,
P
reset
)
\mathcal{N}(\delta \boldsymbol{x}, \boldsymbol{P}_{\text{reset}})
N(δx,Preset) 。
我们设 重置前的名义旋转估计为
R
k
\boldsymbol{R}_k
Rk, 误差状态为
δ
θ
\delta \boldsymbol{\theta}
δθ , 卡尔曼滤波器的增量计算结果为
δ
θ
k
\delta \boldsymbol{\theta}_k
δθk, 注意此处的
δ
θ
k
\delta \boldsymbol{\theta}_k
δθk 是已知的,而
δ
θ
\delta \boldsymbol{\theta}
δθ是一个随机变量。
重置之后的名义旋转部分为:
R
+
Exp
(
δ
θ
+
)
=
R
k
Exp
(
δ
θ
k
)
Exp
(
δ
θ
+
)
=
R
k
Exp
(
δ
θ
)
(33)
\boldsymbol{R}^{+} \text{Exp}(\delta \boldsymbol{\theta}^+) = \boldsymbol{R}_k \text{Exp}(\delta \boldsymbol{\theta}_k)\text{Exp}(\delta \boldsymbol{\theta}^+) = \boldsymbol{R}_k \text{Exp}(\delta \boldsymbol{\theta}) \tag {33}
R+Exp(δθ+)=RkExp(δθk)Exp(δθ+)=RkExp(δθ)(33)
不难得到:
Exp
(
δ
θ
+
)
=
Exp
(
−
δ
θ
k
)
Exp
(
δ
θ
)
(34)
\text{Exp}(\delta \boldsymbol{\theta}^+) = \text{Exp}(-\delta \boldsymbol{\theta}_k) \text{Exp}(\delta \boldsymbol{\theta}) \tag {34}
Exp(δθ+)=Exp(−δθk)Exp(δθ)(34)
注意这里的
δ
θ
\delta \boldsymbol{\theta}
δθ 为小量,利用线性化后的BCH公式,可以得到:
δ
θ
+
=
−
δ
θ
k
+
δ
θ
−
1
2
δ
θ
k
∧
δ
θ
+
o
(
(
δ
θ
)
2
)
(35)
\delta \boldsymbol{\theta}^{+} = -\delta \boldsymbol{\theta}_k + \delta \boldsymbol{\theta} - \frac{1}{2}\delta \boldsymbol{\theta}_k^{\wedge}\delta \boldsymbol{\theta} + o((\delta \boldsymbol{\theta})^2) \tag{35}
δθ+=−δθk+δθ−21δθk∧δθ+o((δθ)2)(35)
于是有:
∂
δ
θ
+
∂
δ
θ
≈
I
−
1
2
δ
θ
k
∧
(36)
\frac{\partial \delta \boldsymbol{\theta}^+}{\partial \delta \boldsymbol{\theta}} \approx \boldsymbol{I} - \frac{1}{2} \delta \boldsymbol{\theta}_k^{\wedge } \tag{36}
∂δθ∂δθ+≈I−21δθk∧(36)
公式(36)表明,重置前后的误差状态,相差一个旋转方面的小雅克比矩阵,我们记作:
J
θ
=
I
−
1
2
δ
θ
k
∧
(37)
\boldsymbol{J_\theta} = \boldsymbol{I} - \frac{1}{2} \delta \boldsymbol{\theta}_k^{\wedge } \tag {37}
Jθ=I−21δθk∧(37)
把这个小雅可比矩阵 放到整个状态变量的维度下,并保持其他部分为单位矩阵,可以得到一个完整的雅可比矩阵:
J
k
=
diag
(
I
3
,
I
3
,
I
θ
,
I
3
,
I
3
,
I
3
)
(38)
\boldsymbol{J_k} = \text{diag}( \boldsymbol{I}_3, \boldsymbol{I}_3, \boldsymbol{I_\theta}, \boldsymbol{I}_3, \boldsymbol{I}_3, \boldsymbol{I}_3 ) \tag{38}
Jk=diag(I3,I3,Iθ,I3,I3,I3)(38)
因此,把误差状态的均值归零的同时,它们的协方差矩阵也应该进行线性变换:
P
reset
=
J
k
P
J
k
T
(39)
\boldsymbol{P}_{\text{reset}} = \boldsymbol{J}_k\boldsymbol{P}\boldsymbol{J}_k^{\text{T}} \tag{39}
Preset=JkPJkT(39)
不过,由于
δ
θ
k
\delta \boldsymbol{\theta}_k
δθk 并不大,这里的
J
k
\boldsymbol{J}_k
Jk 仍然十分接近于单位矩阵,所以大部分材料里并不处理这一项,而是直接把前面估计的
P
\boldsymbol{P}
P 矩阵作为下一个时刻的起点。
但是本文仍然要介绍这一点,该问题实际意义是做了 切空间投影,即:把一个切空间中的高斯分布投影到另一个切空间中。
小结
本文主要介绍了
SO
(
3
)
\text{SO}(3)
SO(3) 流形上的ESKF,相比于四元数形式或者欧拉角形式,更为简单,无需自定义太多符号。
本文主要参考高博知乎