C语言实现巴特沃斯带通滤波器
1. 引言
在数字信号处理领域,数字滤波器的高效实现一直是研究和实践的重点。当前,有多种编程语言可供选择,如C语言、Matlab语言与Python语言,即使如Python与Matlab有实现数字滤波器的库函数,但 Python 和 Matlab 在数字滤波器实现方面都存在着不容忽视的缺点。
Python是一种解释型语言,其代码在运行时需要通过解释器逐行翻译并执行,执行效率低。虽然 Python 有高效的数值计算库(如 Numpy),但在底层计算上,由于解释过程的存在,会引入一定的开销。例如,在同样的 FIR 数字滤波器实现中,Python 的循环结构(即使是使用了 Numpy 的向量化操作)在执行速度上通常比 C 语言慢几倍到几十倍不等,特别是当信号长度很长时,这种性能差距会进一步拉大。此外,由于Python自动内存管理在处理大型信号集时易浪费内存、产生碎片,且在硬件控制上较弱,对嵌入式等资源受限硬件平台适应性差。
Matlab 虽有丰富信号处理库,这使得它在快速原型开发方面具有一定优势。然而,Matlab高度依赖自身软件环境,这意味着要运行 Matlab 编写的数字滤波器程序,必须安装完整的 Matlab 软件。这种依赖性极大地限制了程序的可移植性,使得在不同的操作系统或硬件平台上部署变得复杂且困难。而且,将 Matlab 程序转化为独立的可执行应用程序的过程复杂且效率不高,这在实际的工程应用中会带来诸多不便。
相比之下, C 语言优势显著。C语言编译后直接运行,执行效率高,能快速处理滤波器的数学运算。C 语言有精细内存管理,可按需分配释放内存,适合资源有限环境。它还便于硬件控制,可直接访问寄存器和设置参数,可移植性也很好。因此,使用 C 语言实现数字滤波器具有重要意义,下面将介绍其实现方法。
2. 滤波器算法结构
2.1 滤波器系数的获取
滤波器函数的作用是对信号进行处理,以去除或减少不需要的频率成分,同时保留或增强有用的信号部分。不同类型的滤波器能够实现不同的效果,主要分为以下几类:
- 低通滤波器(Low-pass filter):只允许
低频成分通过,抑制高频成分。适用于去除高频噪声,常用于平滑信号。 - 高通滤波器(High-pass filter):只允许
高频成分通过,抑制低频成分。常用于去除慢变化的信号成分,如去除信号中的趋势或偏移。 - 带通滤波器(Band-pass filter):
允许特定频段的信号通过,抑制高于或低于该频段的成分。用于提取特定频段的信号成分。 - 带阻滤波器(Band-stop filter):
阻止特定频段的信号通过,允许其他频率通过。常用于消除电源干扰频率(如50Hz或60Hz)等。
由于每种类型的滤波器设计目标和频率范围不同,因此计算得到的滤波器系数也不同。设计滤波器系数的手动计算可能非常复杂,因此通常使用信号处理软件(如MATLAB、Python中的scipy.signal库)来自动生成所需的滤波器系数。例如:
- Matlab代码
%% 使用Matlab获取带通滤波器系数 % 设定参数 Fs = 250; % 采样率 (Hz) low_cutoff_bandpass = 4; % 带通滤波器的低频截止 (Hz) high_cutoff_bandpass = 40; % 带通滤波器的高频截止 (Hz) order = 4; % 滤波器阶数 % 归一化截止频率 low_normalized_bandpass = low_cutoff_bandpass / (Fs / 2); high_normalized_bandpass = high_cutoff_bandpass / (Fs / 2); % 设计4阶巴特沃斯带通滤波器 [b_bandpass, a_bandpass] = butter(order, [low_normalized_bandpass high_normalized_bandpass], 'bandpass'); disp('b_bandpass:'); disp(b_bandpass); disp('a_bandpass:'); disp(a_bandpass); - Python代码
'''使用Python获取带通滤波器系数''' from scipy.signal import butter, filtfilt fs = 250 # 采样率 nyq = 0.5 * fs # 归一化频率 order = 4 # 阶数 low_bandpass, high_bandpass = 4, 40 Wn_bandpass = [low_bandpass / nyq, high_bandpass / nyq] b_bandpass, a_bandpass = butter(order, Wn_bandpass, btype='bandpass', analog=False) print("b_bandpass:", b_bandpass.tolist()) print("a_bandpass:", a_bandpass.tolist())
2.2 数字滤波器差分函数
数字滤波器用于离散时间信号处理,即信号在离散时间点上采样并处理。差分方程是描述离散系统的一种标准数学形式,它使用输入、输出的当前和历史样本值,能很好地描述滤波器的递推关系。
一个典型的线性差分方程形式为:
y
[
n
]
=
−
∑
k
=
1
N
a
k
∗
y
[
n
−
k
]
+
∑
k
=
0
M
b
k
∗
x
[
n
−
k
]
(1)
y[n]=-\sum_{k=1}^Na_k*y[n-k]+\sum_{k=0}^Mb_k*x[n-k]\tag{1}
y[n]=−k=1∑Nak∗y[n−k]+k=0∑Mbk∗x[n−k](1)
其中, y [ n ] y[n] y[n]是当前输出, x [ n ] x[n] x[n]是当前输入, a k a_k ak 和 b k b_k bk 是滤波器系数, N N N 和 M M M 分别是反馈和前馈的延迟阶数。
通过差分方程可以实现递归和非递归滤波器的结构:
-
非递归结构(FIR型滤波器):仅包含输入的前馈项(即上式中的 a k = 0 a_k=0 ak=0),没有反馈项,因此更稳定,没有延迟累积或振荡问题。其数学形式为:
y [ n ] = ∑ k = 0 M b k ∗ x [ n − k ] (2) y[n]=\sum_{k=0}^Mb_k*x[n-k]\tag{2} y[n]=k=0∑Mbk∗x[n−k](2) -
递归结构(IIR型滤波器):包含输出的反馈项,可以实现复杂的频率响应,但可能会导致非线性相位或稳定性问题。其数学形式为:
y [ n ] = ∑ k = 0 M b k ∗ x [ n − k ] − ∑ k = 1 N a k ∗ y [ n − k ] (3) y[n]=\sum_{k=0}^Mb_k*x[n-k]-\sum_{k=1}^Na_k*y[n-k]\tag{3} y[n]=k=0∑Mbk∗x[n−k]−k=1∑Nak∗y[n−k](3)
由于IIR型滤波器具有低阶高效、计算量小、适合模拟滤波器特性以及良好的低频性能等优点,其在实时处理和资源受限的应用中具有显著优势。因此IIR型滤波器广泛用于音频处理、无线通信、航空航天、图像处理、医疗设备(ECG、EEG、超声信号处理)等领域。下面给出IIR型滤波器的差分函数C语言实现代码:
#include <stdio.h>
#include <math.h>
#include <memory.h>
#include <stdlib.h>
#include <string.h>
#define EPS 0.000001
// IIR型数字滤波器函数
void digitalFilter(const double* inputSignal, double* outputSignal, int inputLength, double* filterCoefficientsA, double* filterCoefficientsB,
int filterLength, double* initialConditions)
{
double normalizationFactor;
int i, j;
// 判断是否需要归一化
if ((filterCoefficientsA[0] - 1.0 > EPS) || (filterCoefficientsA[0] - 1.0 < -EPS)) {
normalizationFactor = filterCoefficientsA[0];
for (i = 0; i < filterLength; i++) {
filterCoefficientsB[i] /= normalizationFactor;
filterCoefficientsA[i] /= normalizationFactor;
}
}
// 将输出信号初始化为零
for (i = 0; i < inputLength; i++) {
outputSignal[i] = 0.0;
}
// 递归型差分方程
filterCoefficientsA[0] = 0.0;
for (i = 0; i < inputLength; i++) {
for (j = 0; i >= j && j < filterLength; j++) {
// 计算滤波器输出
outputSignal[i] += (filterCoefficientsB[j] * inputSignal[i - j] - filterCoefficientsA[j] * outputSignal[i - j]);
}
// 如果有初始条件且当前位置小于滤波器长度减一,加上初始条件
if (initialConditions && i < filterLength - 1) {
outputSignal[i] += initialConditions[i];
}
}
filterCoefficientsA[0] = 1.0;
}
2.3 滤波器的因果性与边缘效应
大多数滤波器都是因果滤波器,它们依赖当前和之前的样本来计算输出。当信号到达起点或终点时,缺少足够的历史或未来样本,导致滤波器无法正确初始化和延续滤波操作,从而产生不真实的波动或偏差。
滤波操作通常是卷积或相关操作的一种。在卷积运算中,滤波器窗口会滑动到信号的两端,而此时滤波器的一部分会超出信号范围。由于信号两端没有足够的数据来进行完整的卷积计算,这会导致滤波器输出不准确,产生边缘效应。
而在对任务态的EEG数据进行滤波处理时,我们希望滤波后的数据与滤波前的数据的相位保持一致,以避免出现相位偏移现象,影响事件相关电位分析、事件监测、伪影判别与脑网络分析等情况。零相位滤波信号器可成功克服这些不利因素,因为零相位滤波器在滤波后不会引起相位失真现象。而上述介绍的IIR型滤波器本身是因果的,会引入相位延迟,因此通常需要通过双向滤波来实现零相位响应。
双向滤波的原理是:由于正向滤波会带来一个正向的延迟,逆向滤波会带来一个逆向的延迟。因此先将信号先正向通过IIR滤波器,再反向通过同样的IIR滤波器,这样可以消除相位偏移。然而,这种双向滤波方式可能导致边界效应和稳定性问题。
2.4 矩阵乘法函数
为了实现稳定的双向滤波,通常使用状态空间模型来描述IIR滤波器。状态空间模型提供了矩阵表示的滤波器结构,可以方便地在正向和反向方向上进行递推,并且能够确保在双向滤波过程中保持系统的稳定性。
状态空间模型的形式为:
x
[
n
+
1
]
=
A
x
[
n
]
+
B
u
[
n
]
(4)
x[n+1]=Ax[n]+Bu[n] \tag{4}
x[n+1]=Ax[n]+Bu[n](4)
y
[
n
]
=
C
x
[
n
]
+
D
u
[
n
]
(5)
y[n]=Cx[n]+Du[n]\tag{5}
y[n]=Cx[n]+Du[n](5)
这里, A 、 B 、 C 、 D A、B、C、D A、B、C、D 是描述滤波器动态特性的矩阵。零相位滤波需要在正反方向上计算状态,这会涉及矩阵乘法和逆矩阵计算。为此,我们在实现零相位滤波器时应实现矩阵乘法与逆矩阵计算函数。
// 矩阵乘法函数
void matrixMultiplication(double* matrixA, double* matrixB, double* resultMatrix, int numRowsA, int numColsA, int numColsB) {
int rowIndex, colIndex, commonIndex;
int elementIndex;
for (rowIndex = 0; rowIndex < numRowsA; rowIndex++) {
for (colIndex = 0; colIndex < numColsB; colIndex++) {
elementIndex = rowIndex * numColsB + colIndex;
resultMatrix[elementIndex] = 0.0;
// 遍历两个矩阵共同的维度,即矩阵A的列与矩阵B的行
for (commonIndex = 0; commonIndex < numColsA; commonIndex++) {
// 计算矩阵乘法
resultMatrix[elementIndex] += matrixA[rowIndex * numColsA + commonIndex] * matrixB[commonIndex * numColsB + colIndex];
}
}
}
return;
}
2.5 逆矩阵函数
在双向滤波中,状态向量在滤波过程中反向运行。要实现这种反向递推(尤其是在状态空间模型中),需要求解状态向量的初始条件。这通常涉及到逆矩阵计算,特别是在确定系统的初始状态向量时,用于确保滤波结果的精确性和稳定性。
下面这个函数用于计算给定矩阵的逆矩阵。它使用高斯 - 约旦消元法来实现。首先,通过寻找最大元素来进行行和列的交换,以避免除以小的数导致数值不稳定。然后,逐步将矩阵转换为单位矩阵,同时对原始矩阵进行操作,最终得到逆矩阵。
int inverseMatrix(double* matrix, int matrixSize) {
// 用于存储行和列的交换索引
int* rowIndices, *columnIndices;
int i, j, k, l, u, v;
double d, p;
// 分配内存
rowIndices = (int*)malloc(matrixSize * sizeof(int));
columnIndices = (int*)malloc(matrixSize * sizeof(int));
for (k = 0; k < matrixSize; k++) {
// 寻找最大元素
d = 0.0;
for (i = k; i < matrixSize; i++) {
for (j = k; j < matrixSize; j++) {
l = i * matrixSize + j;
p = fabs(matrix[l]);
if (p > d) {
d = p;
rowIndices[k] = i;
columnIndices[k] = j;
}
}
}
// 判断是否可逆
if (d + 1.0 == 1.0) {
free(rowIndices);
free(columnIndices);
printf("err**not invn");
return 0;
}
// 交换行
if (rowIndices[k]!= k) {
for (j = 0; j < matrixSize; j++) {
u = k * matrixSize + j;
v = rowIndices[k] * matrixSize + j;
p = matrix[u];
matrix[u] = matrix[v];
matrix[v] = p;
}
}
// 交换列
if (columnIndices[k]!= k) {
for (i = 0; i < matrixSize; i++) {
u = i * matrixSize + k;
v = i * matrixSize + columnIndices[k];
p = matrix[u];
matrix[u] = matrix[v];
matrix[v] = p;
}
}
// 计算对角线元素的倒数
l = k * matrixSize + k;
matrix[l] = 1.0 / matrix[l];
// 更新非对角线上的元素
for (j = 0; j < matrixSize; j++) {
if (j!= k) {
u = k * matrixSize + j;
matrix[u] = matrix[u] * matrix[l];
}
}
for (i = 0; i < matrixSize; i++) {
if (i!= k) {
for (j = 0; j < matrixSize; j++) {
if (j!= k) {
u = i * matrixSize + j;
matrix[u] = matrix[u] - matrix[i * matrixSize + k] * matrix[k * matrixSize + j];
}
}
}
}
for (i = 0; i < matrixSize; i++) {
if (i!= k) {
u = i * matrixSize + k;
matrix[u] = -matrix[u] * matrix[l];
}
}
}
// 恢复交换的列和行
for (k = matrixSize - 1; k >= 0; k--) {
if (columnIndices[k]!= k) {
for (j = 0; j < matrixSize; j++) {
u = k * matrixSize + j;
v = columnIndices[k] * matrixSize + j;
p = matrix[u];
matrix[u] = matrix[v];
matrix[v] = p;
}
}
if (rowIndices[k]!= k) {
for (i = 0; i < matrixSize; i++) {
u = i * matrixSize + k;
v = i * matrixSize + rowIndices[k];
p = matrix[u];
matrix[u] = matrix[v];
matrix[v] = p;
}
}
}
// 释放内存
free(rowIndices);
free(columnIndices);
return 0;
}
2.6 零相位滤波器函数
上面谈到零相位滤波器可成功消除相位失真的现象。这样的处理方式非常适合对时域特征要求严格的信号处理任务,如EEG信号分析,确保滤波后的信号在保留频率特征的同时,不会受到滤波器引入的相位延迟影响。
具体而言,本文借助于以下几个步骤,成功将IIR型滤波器转化为IIR型零相位型滤波器:
-
边缘反射扩展:为了减少滤波器对信号两端的边缘效应,可通过
反射扩展输入信号的两端。前端和后端的信号样本被用来创建扩展信号,避免了因无法访问两端数据而产生的失真。 -
初始化滤波器状态:在IIR型滤波器中,初始条件对正确滤波非常关键。通过计算工作矩阵和瞬态向量,函数
求解出初始条件,从而避免了滤波器启动时的瞬态响应对信号的影响。 -
正向滤波:对扩展信号执行
正向滤波,得到初步的滤波结果。正向滤波会引入相位失真,但这不影响最终的结果,因为接下来会进行反向滤波。 -
反向滤波:反转正向滤波结果,并对反转后的信号执行
逆向滤波。由于信号的顺序已经被反转,反向滤波能消除相位失真。 -
恢复原始顺序:反向滤波后的信号再
反转回原始顺序,得到最终的零相位滤波结果。 -
内存管理:在整个过程中,动态分配了多个内存块用于存储扩展信号、滤波器状态、矩阵计算等中间结果,并在结束时释放内存,避免内存泄漏。
// filtfilt 函数:对输入信号进行零相位滤波
int filtfilt(double* input_signal, double* output_signal, int signal_length, double* filter_a, double* filter_b, int filter_order)
{
int reflection_length;
int extended_length; // 扩展序列的长度,包括边缘反射部分
int i;
double *extended_signal, *filtered_signal, *p, *t, *end;
double *workspace_matrix, *transient_vector, *initial_conditions;
double first_sample, last_sample;
// 根据滤波器阶数计算反射长度
reflection_length = filter_order - 1;
// 检查输入信号长度是否过短或滤波器参数是否无效
if(signal_length <= 3 * reflection_length || filter_order < 2) return -1;
// 定义扩展长度以容纳边缘反射,用于减小边缘效应
extended_length = 6 * reflection_length + signal_length;
extended_signal = (double *)malloc(extended_length * sizeof(double));
filtered_signal = (double *)malloc(extended_length * sizeof(double));
workspace_matrix = (double*)malloc(sizeof(double) * reflection_length * reflection_length);
transient_vector = (double*)malloc(sizeof(double) * reflection_length);
initial_conditions = (double*)malloc(sizeof(double) * reflection_length);
// 检查内存分配是否成功
if( !extended_signal || !filtered_signal || !workspace_matrix || !transient_vector || !initial_conditions ){
free(extended_signal);
free(filtered_signal);
free(workspace_matrix);
free(transient_vector);
free(initial_conditions);
return 1;
}
// 在信号开始处反射以减小边缘效应
first_sample = input_signal[0];
for(p = input_signal + 3 * reflection_length, t = extended_signal; p > input_signal; --p, ++t)
*t = 2.0 * first_sample - *p;
// 复制信号的主体部分
for(end = input_signal + signal_length; p < end; ++p, ++t)
*t = *p;
// 在信号结束处反射以减小边缘效应
last_sample = input_signal[signal_length - 1];
for(end = extended_signal + extended_length, p -= 2; t < end; --p, ++t)
*t = 2.0 * last_sample - *p;
// 初始化工作矩阵,用于求解初始条件
memset(workspace_matrix, 0, sizeof(double) * reflection_length * reflection_length);
workspace_matrix[0] = 1.0 + filter_a[1];
for(i = 1; i < reflection_length; i++) {
workspace_matrix[i * reflection_length] = filter_a[i + 1];
workspace_matrix[i * reflection_length + i] = 1.0;
workspace_matrix[(i - 1) * reflection_length + i] = -1.0;
}
// 计算用于初始条件的瞬态向量
for(i = 0; i < reflection_length; i++) {
transient_vector[i] = filter_b[i + 1] - filter_a[i + 1] * filter_b[0];
}
// 如果矩阵求逆成功,计算初始条件
if(inverseMatrix(workspace_matrix, reflection_length)) {
free(initial_conditions);
initial_conditions = NULL;
} else {
matrixMultiplication(workspace_matrix, transient_vector, initial_conditions, reflection_length, reflection_length, 1);
}
free(workspace_matrix);
free(transient_vector);
// 对扩展信号执行正向滤波,将结果保存在 filtered_signal 中
first_sample = extended_signal[0];
if(initial_conditions) {
for(p = initial_conditions, end = initial_conditions + reflection_length; p < end; )
*(p++) *= first_sample;
}
digitalFilter(extended_signal, filtered_signal, extended_length, filter_a, filter_b, filter_order, initial_conditions);
// 反转滤波后的信号以进行逆向滤波
for(p = filtered_signal, end = filtered_signal + extended_length - 1; p < end; p++, end--) {
double temp = *p;
*p = *end;
*end = temp;
}
// 对反转后的信号执行逆向滤波
last_sample = (*filtered_signal) / first_sample;
if(initial_conditions) {
for(p = initial_conditions, end = initial_conditions + reflection_length; p < end; )
*(p++) *= last_sample;
}
digitalFilter(filtered_signal, extended_signal, extended_length, filter_a, filter_b, filter_order, initial_conditions);
// 将滤波后的信号反转回原顺序,并存储在 output_signal 中
end = output_signal + signal_length;
p = extended_signal + 3 * reflection_length + signal_length - 1;
while(output_signal < end) {
*output_signal++ = *p--;
}
// 清理分配的内存
free(initial_conditions);
free(extended_signal);
free(filtered_signal);
return 0;
}
3. 完整代码实现
#include <stdio.h>
#include <math.h>
#include <memory.h>
#include <stdlib.h>
#include <string.h>
#define EPS 0.000001
// IIR型数字滤波器函数
void digitalFilter(const double* inputSignal, double* outputSignal, int inputLength, double* filterCoefficientsA, double* filterCoefficientsB,
int filterLength, double* initialConditions)
{
double normalizationFactor;
int i, j;
// 判断是否需要归一化
if ((filterCoefficientsA[0] - 1.0 > EPS) || (filterCoefficientsA[0] - 1.0 < -EPS)) {
normalizationFactor = filterCoefficientsA[0];
for (i = 0; i < filterLength; i++) {
filterCoefficientsB[i] /= normalizationFactor;
filterCoefficientsA[i] /= normalizationFactor;
}
}
// 将输出信号初始化为零
for (i = 0; i < inputLength; i++) {
outputSignal[i] = 0.0;
}
// 递归式差分方程
filterCoefficientsA[0] = 0.0;
for (i = 0; i < inputLength; i++) {
for (j = 0; i >= j && j < filterLength; j++) {
// 计算滤波器输出
outputSignal[i] += (filterCoefficientsB[j] * inputSignal[i - j] - filterCoefficientsA[j] * outputSignal[i - j]);
}
// 如果有初始条件且当前位置小于滤波器长度减一,加上初始条件
if (initialConditions && i < filterLength - 1) {
outputSignal[i] += initialConditions[i];
}
}
filterCoefficientsA[0] = 1.0;
}
// 矩阵乘法函数
void matrixMultiplication(double* matrixA, double* matrixB, double* resultMatrix, int numRowsA, int numColsA, int numColsB) {
int rowIndex, colIndex, commonIndex;
int elementIndex;
for (rowIndex = 0; rowIndex < numRowsA; rowIndex++) {
for (colIndex = 0; colIndex < numColsB; colIndex++) {
elementIndex = rowIndex * numColsB + colIndex;
resultMatrix[elementIndex] = 0.0;
// 遍历两个矩阵共同的维度,即矩阵A的列与矩阵B的行
for (commonIndex = 0; commonIndex < numColsA; commonIndex++) {
// 计算矩阵乘法
resultMatrix[elementIndex] += matrixA[rowIndex * numColsA + commonIndex] * matrixB[commonIndex * numColsB + colIndex];
}
}
}
return;
}
//求逆矩阵,当返回值为0时成功求解逆矩阵
int inverseMatrix(double* matrix, int matrixSize) {
// 用于存储行和列的交换索引
int* rowIndices, *columnIndices;
int i, j, k, l, u, v;
double d, p;
// 分配内存
rowIndices = (int*)malloc(matrixSize * sizeof(int));
columnIndices = (int*)malloc(matrixSize * sizeof(int));
for (k = 0; k < matrixSize; k++) {
// 寻找最大元素
d = 0.0;
for (i = k; i < matrixSize; i++) {
for (j = k; j < matrixSize; j++) {
l = i * matrixSize + j;
p = fabs(matrix[l]);
if (p > d) {
d = p;
rowIndices[k] = i;
columnIndices[k] = j;
}
}
}
// 判断是否可逆
if (d + 1.0 == 1.0) {
free(rowIndices);
free(columnIndices);
printf("err**not invn");
return 0;
}
// 交换行
if (rowIndices[k]!= k) {
for (j = 0; j < matrixSize; j++) {
u = k * matrixSize + j;
v = rowIndices[k] * matrixSize + j;
p = matrix[u];
matrix[u] = matrix[v];
matrix[v] = p;
}
}
// 交换列
if (columnIndices[k]!= k) {
for (i = 0; i < matrixSize; i++) {
u = i * matrixSize + k;
v = i * matrixSize + columnIndices[k];
p = matrix[u];
matrix[u] = matrix[v];
matrix[v] = p;
}
}
// 计算对角线元素的倒数
l = k * matrixSize + k;
matrix[l] = 1.0 / matrix[l];
// 更新非对角线上的元素
for (j = 0; j < matrixSize; j++) {
if (j!= k) {
u = k * matrixSize + j;
matrix[u] = matrix[u] * matrix[l];
}
}
for (i = 0; i < matrixSize; i++) {
if (i!= k) {
for (j = 0; j < matrixSize; j++) {
if (j!= k) {
u = i * matrixSize + j;
matrix[u] = matrix[u] - matrix[i * matrixSize + k] * matrix[k * matrixSize + j];
}
}
}
}
for (i = 0; i < matrixSize; i++) {
if (i!= k) {
u = i * matrixSize + k;
matrix[u] = -matrix[u] * matrix[l];
}
}
}
// 恢复交换的列和行
for (k = matrixSize - 1; k >= 0; k--) {
if (columnIndices[k]!= k) {
for (j = 0; j < matrixSize; j++) {
u = k * matrixSize + j;
v = columnIndices[k] * matrixSize + j;
p = matrix[u];
matrix[u] = matrix[v];
matrix[v] = p;
}
}
if (rowIndices[k]!= k) {
for (i = 0; i < matrixSize; i++) {
u = i * matrixSize + k;
v = i * matrixSize + rowIndices[k];
p = matrix[u];
matrix[u] = matrix[v];
matrix[v] = p;
}
}
}
// 释放内存
free(rowIndices);
free(columnIndices);
return 0;
}
// filtfilt 函数:对输入信号进行零相位滤波
int filtfilt(double* input_signal, double* output_signal, int signal_length, double* filter_a, double* filter_b, int filter_order)
{
int reflection_length;
int extended_length; // 扩展序列的长度,包括边缘反射部分
int i;
double *extended_signal, *filtered_signal, *p, *t, *end;
double *workspace_matrix, *transient_vector, *initial_conditions;
double first_sample, last_sample;
// 根据滤波器阶数计算反射长度
reflection_length = filter_order - 1;
// 检查输入信号长度是否过短或滤波器参数是否无效
if(signal_length <= 3 * reflection_length || filter_order < 2) return -1;
// 定义扩展长度以容纳边缘反射,用于减小边缘效应
extended_length = 6 * reflection_length + signal_length;
extended_signal = (double *)malloc(extended_length * sizeof(double));
filtered_signal = (double *)malloc(extended_length * sizeof(double));
workspace_matrix = (double*)malloc(sizeof(double) * reflection_length * reflection_length);
transient_vector = (double*)malloc(sizeof(double) * reflection_length);
initial_conditions = (double*)malloc(sizeof(double) * reflection_length);
// 检查内存分配是否成功
if( !extended_signal || !filtered_signal || !workspace_matrix || !transient_vector || !initial_conditions ){
free(extended_signal);
free(filtered_signal);
free(workspace_matrix);
free(transient_vector);
free(initial_conditions);
return 1;
}
// 在信号开始处反射以减小边缘效应
first_sample = input_signal[0];
for(p = input_signal + 3 * reflection_length, t = extended_signal; p > input_signal; --p, ++t)
*t = 2.0 * first_sample - *p;
// 复制信号的主体部分
for(end = input_signal + signal_length; p < end; ++p, ++t)
*t = *p;
// 在信号结束处反射以减小边缘效应
last_sample = input_signal[signal_length - 1];
for(end = extended_signal + extended_length, p -= 2; t < end; --p, ++t)
*t = 2.0 * last_sample - *p;
// 初始化工作矩阵,用于求解初始条件
memset(workspace_matrix, 0, sizeof(double) * reflection_length * reflection_length);
workspace_matrix[0] = 1.0 + filter_a[1];
for(i = 1; i < reflection_length; i++) {
workspace_matrix[i * reflection_length] = filter_a[i + 1];
workspace_matrix[i * reflection_length + i] = 1.0;
workspace_matrix[(i - 1) * reflection_length + i] = -1.0;
}
// 计算用于初始条件的瞬态向量
for(i = 0; i < reflection_length; i++) {
transient_vector[i] = filter_b[i + 1] - filter_a[i + 1] * filter_b[0];
}
// 如果矩阵求逆成功,计算初始条件
if(inverseMatrix(workspace_matrix, reflection_length)) {
free(initial_conditions);
initial_conditions = NULL;
} else {
matrixMultiplication(workspace_matrix, transient_vector, initial_conditions, reflection_length, reflection_length, 1);
}
free(workspace_matrix);
free(transient_vector);
// 对扩展信号执行正向滤波,将结果保存在 filtered_signal 中
first_sample = extended_signal[0];
if(initial_conditions) {
for(p = initial_conditions, end = initial_conditions + reflection_length; p < end; )
*(p++) *= first_sample;
}
digitalFilter(extended_signal, filtered_signal, extended_length, filter_a, filter_b, filter_order, initial_conditions);
// 反转滤波后的信号以进行逆向滤波
for(p = filtered_signal, end = filtered_signal + extended_length - 1; p < end; p++, end--) {
double temp = *p;
*p = *end;
*end = temp;
}
// 对反转后的信号执行逆向滤波
last_sample = (*filtered_signal) / first_sample;
if(initial_conditions) {
for(p = initial_conditions, end = initial_conditions + reflection_length; p < end; )
*(p++) *= last_sample;
}
digitalFilter(filtered_signal, extended_signal, extended_length, filter_a, filter_b, filter_order, initial_conditions);
// 将滤波后的信号反转回原顺序,并存储在 output_signal 中
end = output_signal + signal_length;
p = extended_signal + 3 * reflection_length + signal_length - 1;
while(output_signal < end) {
*output_signal++ = *p--;
}
// 清理分配的内存
free(initial_conditions);
free(extended_signal);
free(filtered_signal);
return 0;
}
int main()
{
// 例子带通滤波器系数(4阶Butterworth带通滤波器,采样率250Hz, 4-40Hz)
double b_bandpass[] = {0.016255176549541173, 0.0, -0.06502070619816469, 0.0,
0.09753105929724704, 0.0, -0.06502070619816469, 0.0, 0.016255176549541173};
double a_bandpass[] = {1.0, -5.360703285534569, 12.74230451194405, -17.736407401314917,
15.949378473690096, -9.51256976782561, 3.6615254094399727, -0.8286427351763588, 0.08515392332605591};
// 定义测试的待滤波数据, 1s, 250个采样点
double x[] = {7994.9079, 7978.61475, 7976.6703, 7992.0918, 8006.7534, 8000.07075, 7987.5771, 7984.0458, 7999.9143, 8014.4418,
8004.0714, 7983.04005, 7980.8721, 7994.70675, 8009.0778, 7999.93665, 7981.4979, 7978.3242, 7994.66205, 8007.84855,
7997.2323, 7981.6767, 7984.2693, 7999.9143, 8012.7879, 8001.18825, 7982.8389, 7984.06815, 7998.19335, 8004.8313,
7994.7291, 7978.9053, 7976.24565, 7989.52155, 7999.75785, 7988.31465, 7978.12305, 7977.2514, 7993.49985, 8009.10015,
7997.74635, 7978.57005, 7973.4519, 7987.24185, 8006.28405, 7999.13205, 7983.88935, 7980.2463, 7992.38235, 8005.8147,
7998.7074, 7981.43085, 7977.2514, 7991.8236, 8008.07205, 7997.12055, 7980.0675, 7974.10005, 7985.36445, 7998.37215,
7990.0803, 7974.8376, 7971.55215, 7982.45895, 7999.8249, 7995.2655, 7977.81015, 7978.7712, 7995.3549, 8004.9207,
7990.8849, 7975.21755, 7977.00555, 7994.03625, 8008.0497, 7997.1429, 7979.86635, 7978.25715, 7996.40535, 8008.69785,
7998.23805, 7983.26355, 7982.2131, 7996.89705, 8008.74255, 7999.0203, 7981.20735, 7978.7265, 7996.13715, 8013.3243,
8005.39005, 7987.51005, 7984.91745, 7999.2438, 8010.7764, 8000.2272, 7989.11925, 7989.2757, 7999.44495, 8006.46285,
7996.36065, 7982.8836, 7979.37465, 7998.8415, 8017.01205, 8006.59695, 7990.5273, 7983.5541, 7999.71315, 8015.2017,
8008.7202, 7992.96345, 7991.48835, 8006.9769, 8018.1966, 8004.89835, 7983.2859, 7979.77695, 8002.1046, 8017.86135,
8005.6806, 7985.9232, 7985.40915, 8005.47945, 8017.0791, 8003.8926, 7986.34785, 7990.90725, 8005.5465, 8017.99545,
8011.2681, 7991.1531, 7988.09115, 8005.3677, 8016.498, 8003.95965, 7989.0522, 7995.6231, 8011.7598, 8022.86775,
8014.6653, 7997.3664, 7995.3996, 8011.02225, 8022.6666, 8008.69785, 7988.80635, 7987.9794, 7998.86385, 8011.3128,
8001.5682, 7987.3983, 7986.07965, 8000.07075, 8011.4022, 8003.8479, 7993.05285, 7994.2821, 8009.54715, 8023.203,
8014.1736, 7996.8747, 7992.69525, 8005.5912, 8019.3588, 8009.1225, 7998.0369, 7999.6014, 8014.06185, 8020.4316,
8011.37985, 8000.3166, 8000.8083, 8017.68255, 8027.226, 8007.98265, 7995.33255, 7997.52285, 8016.34155, 8029.2375,
8016.52035, 7997.2323, 7993.7457, 8009.81535, 8020.72215, 8006.73105, 7994.84085, 7995.64545, 8007.0216, 8012.1621,
7999.6908, 7987.28655, 7987.19715, 8001.6576, 8012.45265, 7997.96985, 7986.83955, 7987.51005, 8001.4341, 8010.03885,
7993.2093, 7978.5924, 7979.2629, 7995.8019, 8003.3562, 7993.72335, 7980.00045, 7979.91105, 7998.68505, 8014.1289,
8000.0931, 7983.57645, 7982.05665, 7996.36065, 8008.8543, 8000.51775, 7983.93405, 7982.50365, 7997.47815, 8011.0446,
8000.1378, 7981.0956, 7980.5592, 7998.1263, 8010.97755, 8001.4341, 7989.3204, 7989.07455, 7998.7074, 8007.53565,
7995.91365, 7984.7163, 7984.91745, 8004.9207, 8015.13465, 8003.51265, 7987.2642, 7985.2080, 8007.4239, 8019.3588,
8005.83705, 7994.61735, 7995.46665, 8006.5299, 8014.50885, 8001.41175, 7984.51515, 7983.5541, 8001.6576, 8009.9718};
// 使用自定义的滤波器对250个采样点数据进行数字滤波
int x_length = 250;
double y[250];
int coeff_length = sizeof(b_bandpass) / sizeof(b_bandpass[0]);
// 应用filtfilt进行带通滤波
filtfilt(x, y, x_length, a_bandpass, b_bandpass, coeff_length);
// 打开文件进行写入
FILE *output_file = fopen("c_output_signal_blog.txt", "w");
if (output_file == NULL) {
printf("Failed to open file for writing!\n");
return 1;
}
// 输出结果
printf("Output result after bandpass filtering in C language:\n");
for (int i = 0; i < x_length; i++) {
printf("%f, ", y[i]);
// 打开文件进行写入
fprintf(output_file, "%f\n", y[i]);
}
return 0;
}
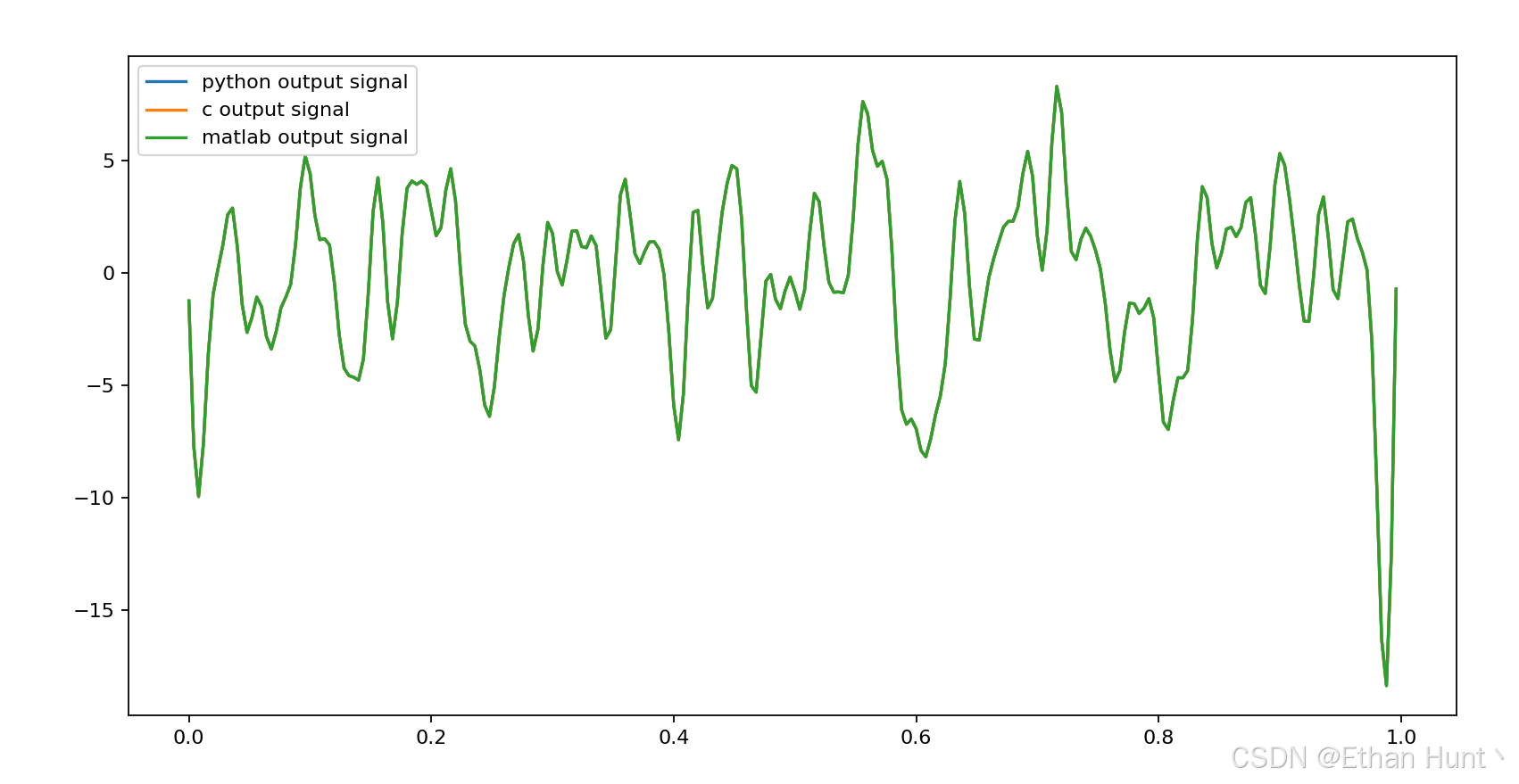
4. 实现效果对比
当使用相同的滤波系数与输入信号时,python、c、matlab三种编程语言实现的零相位IIR型滤波器输出信号在绘图时曲线应完全重合,如下图所示: