面对底盘ROS分装好的api接口设备无法触碰到底层ROS话题问题,同时苦于在未导航前提前估计路程大小的我,在网上没有办法的情况下又苦恼了好几天,直到得到一个师兄的点拨,编写了如下的代码算是真正解决了不用ROS低层topic话题便可以获得估计的路程~ 【PS:这里需要换成自己机器人的api接口】
步骤如下:
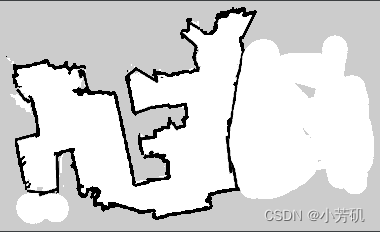
- 保存地图到本地
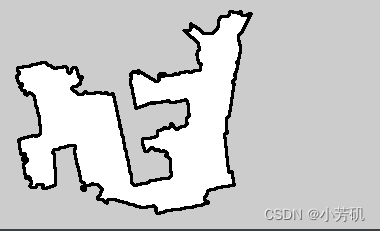
- 建立处理图片代码(我理解为去除噪声)
def map_dealing(map_path: str) -> None:
map_origin = cv2.imread(map_path, cv2.IMREAD_GRAYSCALE)
width, high = np.shape(map_origin)
for x in range(width):
for y in range(high):
if 0 <= map_origin[x, y] <= 204:
map_origin[x, y] = 0
else:
map_origin[x, y] = 255
num_labels, labels, stats, centroids = cv2.connectedComponentsWithStats(map_origin, connectivity=4)
area = stats[:, 4:5] # area
max1 = np.sort(area, axis=0)[-1] # first area label
max_index = area.tolist().index(max1)
max2 = np.sort(area, axis=0)[-2] # second area label
max2_index = area.tolist().index(max2)
map_connectedcomponents = map_origin
for x in range(width):
for y in range(high):
if labels[x, y] == max2_index:
map_connectedcomponents[x, y] = 255
else:
map_connectedcomponents[x, y] = 204
for x in range(width):
for y in range(high):
if map_origin[x, y] == 0:
map_connectedcomponents[x, y] = 0
map_binary = np.array(map_connectedcomponents)
for x in range(width):
for y in range(high):
if map_binary[x, y] == 204:
map_binary[x, y] = 0
contours, hierarchy = cv2.findContours(map_binary, cv2.RETR_LIST, cv2.CHAIN_APPROX_SIMPLE)
cv2.drawContours(map_connectedcomponents, contours, -1, 0, 2)
map_name = map_path.split('.')
cv2.imwrite(map_name[0] + 'Dealing' + '.png', map_connectedcomponents)
目的与结果如下:
变成如下:
- 写 像素到真实世界的映射函数/真实世界到像素的映射函数
def real_to_pix(self, real_x, real_y):
"""
世界坐标转换成像素坐标
:param real_x: 世界坐标x
:param real_y: 世界坐标y
:return: (像素坐标x, 像素坐标y)
"""
return int((real_x - self.origin_x) / self.resolution), \
int(self.height - (real_y - self.origin_y) / self.resolution)
def pix_to_real(self, pix_x, pix_y):
"""
像素坐标转换成世界坐标
:param pix_x: 像素坐标x
:param pix_y: 像素坐标y
:return: (世界坐标x, 世界坐标y)
"""
return self.resolution * pix_x + self.origin_x, self.origin_y - (pix_y - self.height) * self.resolution
import math
from water_api import WaterApi
water = WaterApi("192.168.10.10", 31001)
water.map_dealing("/home/water/下载/yolov5_d435i_detection/xindongyuan20230408.png")
# exit(0)
start = []
location = water.robot_status()
print(location['results']['current_pose'])
start.append(location['results']['current_pose']['x'])
start.append(location['results']['current_pose']['y'])import math
from water_api import WaterApi
water = WaterApi("192.168.10.10", 31001)
water.map_dealing("/home/water/下载/yolov5_d435i_detection/xindongyuan20230408.png")
# exit(0)
start = []
location = water.robot_status()
print(location['results']['current_pose'])
start.append(location['results']['current_pose']['x'])
start.append(location['results']['current_pose']['y'])
# water.move_location_pretend(-4.4617, -1.7089, -3.0321)
pix_start_x, pix_start_y = water.real_to_pix(start[0], start[1])
# print("plan:", plan['results']['distance']) # 距离长度
#
import json
with open('/home/water/下载/yolov5_d435i_detection/position.json', 'r') as f:
result = json.load(f)
print(result['沙发'])
real_end_x, real_end_y = result['沙发']['x'], result['沙发']['y']
pix_end_x, pix_end_y = water.real_to_pix(real_end_x, real_end_y)
# import math
# print(math.sqrt(math.pow((0.2139 + 4.4617 ), 2) + math.pow(0.1294 + 1.7089, 2)))
import networkx as nx
import cv2
def dist(a, b):
(x1, y1) = a
(x2, y2) = b
return math.sqrt((x1 - x2) ** 2 + (y1 - y2) ** 2)
def distance(x_start, y_start, x_end, y_end):
image = cv2.imread('/home/water/下载/yolov5_d435i_detection/xindongyuan20230408Dealing.png')
graph = nx.Graph()
sum = 0
for i in range(image.shape[0]):
for j in range(image.shape[1]):
if image[i][j][0] == 255 and image[i][j][1] == 255 and image[i][j][2] == 255:
sum += 1
graph.add_node((i, j))
for di in range(-5, 6): # -4, 5
for dj in range(-5, 6):
if graph.has_node((i + di, j + dj)):
graph.add_edge((i, j), (i + di, j + dj), weight=math.sqrt(di**2 + dj**2))
'''if graph.has_node((i - 1, j)):
graph.add_edge((i, j), (i - 1, j))
if graph.has_node((i + 1, j)):
graph.add_edge((i, j), (i + 1, j))
if graph.has_node((i, j - 1)):
graph.add_edge((i, j), (i, j - 1))
if graph.has_node((i, j + 1)):
graph.add_edge((i, j), (i, j + 1))'''
assert graph.has_node((y_start, x_start))
assert graph.has_node((y_end, x_end))
print(len(graph.edges))
print(len(graph.nodes))
path = nx.astar_path(graph, (y_start, x_start), (y_end, x_end), heuristic=dist, weight='weight') # weight='weight'
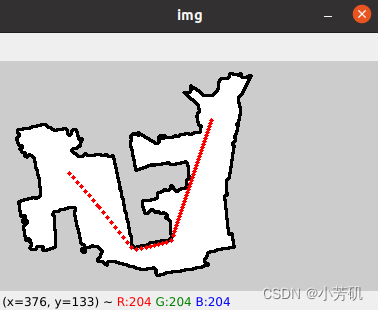
##########################
# for i in range(len(path)):
# cv2.circle(image, (path[i][1], path[i][0]), 2, (0, 0, 255), -1)
# cv2.imshow('img', image)
# cv2.waitKey(100000)
#############################3
path_real = []
for i in range(len(path)):
x, y = water.pix_to_real(path[i][1], path[i][0])
path_real.append([x, y])
S = 0
for i in range(len(path_real) - 1):
S += dist(path_real[i], path_real[i+1]) * 1.2525
return S
S = distance(pix_start_x, pix_start_y, pix_end_x, pix_end_y)
print("S:", S)
# water.move_location_pretend(-4.4617, -1.7089, -3.0321)
pix_start_x, pix_start_y = water.real_to_pix(start[0], start[1])
# print("plan:", plan['results']['distance']) # 距离长度
#
import json
with open('/home/water/下载/yolov5_d435i_detection/position.json', 'r') as f:
result = json.load(f)
print(result['沙发'])
real_end_x, real_end_y = result['沙发']['x'], result['沙发']['y']
pix_end_x, pix_end_y = water.real_to_pix(real_end_x, real_end_y)
# import math
# print(math.sqrt(math.pow((0.2139 + 4.4617 ), 2) + math.pow(0.1294 + 1.7089, 2)))
import networkx as nx
import cv2
def dist(a, b):
(x1, y1) = a
(x2, y2) = b
return math.sqrt((x1 - x2) ** 2 + (y1 - y2) ** 2)
def distance(x_start, y_start, x_end, y_end):
image = cv2.imread('/home/water/下载/yolov5_d435i_detection/xindongyuan20230408Dealing.png')
graph = nx.Graph()
sum = 0
for i in range(image.shape[0]):
for j in range(image.shape[1]):
if image[i][j][0] == 255 and image[i][j][1] == 255 and image[i][j][2] == 255:
sum += 1
graph.add_node((i, j))
for di in range(-5, 6): # -4, 5
for dj in range(-5, 6):
if graph.has_node((i + di, j + dj)):
graph.add_edge((i, j), (i + di, j + dj), weight=math.sqrt(di**2 + dj**2))
'''if graph.has_node((i - 1, j)):
graph.add_edge((i, j), (i - 1, j))
if graph.has_node((i + 1, j)):
graph.add_edge((i, j), (i + 1, j))
if graph.has_node((i, j - 1)):
graph.add_edge((i, j), (i, j - 1))
if graph.has_node((i, j + 1)):
graph.add_edge((i, j), (i, j + 1))'''
assert graph.has_node((y_start, x_start))
assert graph.has_node((y_end, x_end))
print(len(graph.edges))
print(len(graph.nodes))
path = nx.astar_path(graph, (y_start, x_start), (y_end, x_end), heuristic=dist, weight='weight') # weight='weight'
##########################
# for i in range(len(path)):
# cv2.circle(image, (path[i][1], path[i][0]), 2, (0, 0, 255), -1)
# cv2.imshow('img', image)
# cv2.waitKey(100000)
#############################3
path_real = []
for i in range(len(path)):
x, y = water.pix_to_real(path[i][1], path[i][0])
path_real.append([x, y])
S = 0
for i in range(len(path_real) - 1):
S += dist(path_real[i], path_real[i+1]) * 1.2525
return S
S = distance(pix_start_x, pix_start_y, pix_end_x, pix_end_y)
print("S:", S)
计算出来的结果: