PV-RCNN: Point-Voxel Feature Set Abstraction for 3D Object Detection
目录
-
- PV-RCNN: Point-Voxel Feature Set Abstraction for 3D Object Detection
-
- Abstraction:
- Method:
-
- 1 PV-RCNN for Point Cloud Object Detection
Abstraction:
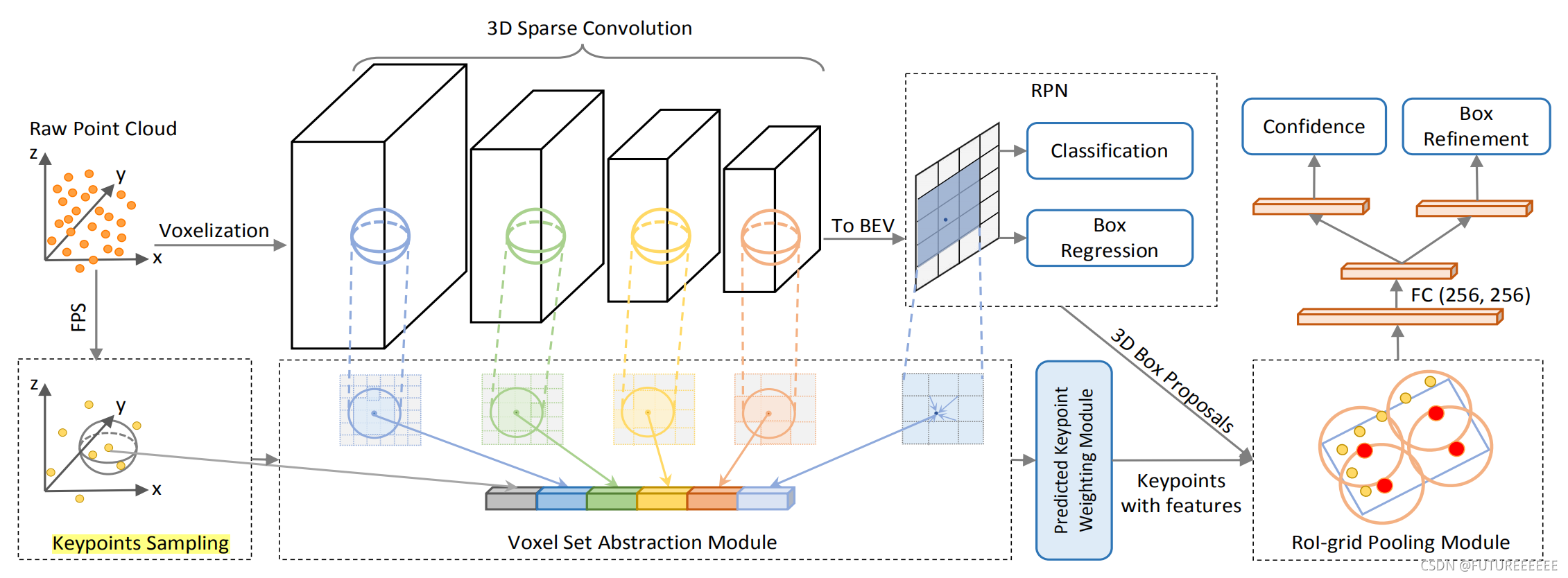
利用了两个优势:1 3d体素CNN网络的高效性 2 pointnet中灵活的感受野。如图上半部分所示,通过3d体素卷积网络获得BEV(鸟瞰图),经有RPN模块获得3d的box proposal区域,为进一步获得proposal的置信度并精炼其3d box的定位,提出了一种关键点特征序列生成算法,如图下半部分所示,首先在原始点云中使用FPS采样出关键点,这些关键点连同关键点周围一定范围的点输入到pointnet中获得关键点特征序列。该过程在卷积的不同尺度特征图中多次进行,最终获得一个多尺度的、由关键点及其周围点产生的特征序列。计算每一个RPN提出给出的3d box范围内的关键点,将这些关键点在上述总关键点特征序列中的特征提取出来,用于对3dbox的置信度以及位置精炼。
Method:
1 PV-RCNN for Point Cloud Object Detection
本文提出了一个两阶段3d检测网络框架旨在实现更为精确的3d检测。总的来说,基于3d体素的稀疏CNN网络计算效率很高,有能力产生高质量的Proposal ;而基于pointnet的方法能够灵活的调整感受野,获取上下文信息。PV-RCNN结合了上述的两种优势:如网络概览图所示,PV-RCNN使用一个稀疏的3d体素卷积网络作为主干网络,对于每一个一阶段检测器给出的3dproposal,我们提出两种提取其对应场景特征的工具:1 voxel-to-keypoint scene encoding 将所有的特征收集在一个关键点特征序列中,2 point-to grid RoI feature abstraction 高效的将Proposal区域内的关键点特征序列用于推理,优化propsal的位置和置信度。
1.1 3D Voxel CNN for Effificient Feature Encoding and Proposal Generation(基于3d体素卷积主干网络的特征编码和3d Proposal 生成模块)
3D voxel CNN是一种高效、准确的主干网络,可以将点云转化成稀疏的3d特征。这种方法的缺陷如下:1 输出的特征图被降采样,导致object的定位存在偏差。2 对于每一个proposal在二阶段分类中,只能获得很小领域范围内的特征。
虽然可以直接将3d propoal区域内的多尺度体素特征(即在不同尺度的特征图中进行ROipool)直接送入二阶段检测器用作计算置信度和boxr efinement,但是这之中含有很多的无效点,而且计算开销大。所以本文提出了一种基于Pointnet(具有从任意大小领域中获取特征的能力),多尺度关键点特征序列编码网络,将propoal内的关键点特征用于精炼proposal。
3D voxel CNN:输入的原始点云被划分成L × W × H的体素(不同与pointpiller中的xoy平面上的二维体素划分,本文使用的体素是三维的),网络通过一系列的3x3x3卷积将原始点云逐级降采样。
3D proposal generation:将Z轴特征压缩,获得鸟瞰的特征图(降采样了八倍)使用anchor-based approaches ,这种方法recall很高。
f i ( p v k ) = max { G ( M ( S i ( l k ) ) ) } ( 1 ) f_{i}^{\left(p v_{k}\right)}=\max \left\{G\left(\mathcal{M}\left(S_{i}^{\left(l_{k}\right)}\right)\right)\right\} (1) fi