本文旨在以 4D 毫米波雷达的 PCD 点云格式文件为基础,直接生成可用于后续无人机路径规划、能提供雷达感知环境的 2D 导航地图文件PGM,从而为无人机在相关环境中的飞行路径规划等操作提供有力的基于雷达感知的环境信息支撑。
安装PCD转PGM代码
代码来自参考博客的github:
3D激光SLAM点云地图pcd转导航可用的2D栅格地图_pcd2pgm-CSDN博客
GitHub - hujiax380/pcd2pgm: A tool that can convert PCD pointcloud file to PGM map file
nvidia@Xavier-NX:~$ mkdir -p ~/pcd2pgm_test/src
nvidia@Xavier-NX:~$ cd pcd2pgm_test/
nvidia@Xavier-NX:~/pcd2pgm_test$ cd src/
nvidia@Xavier-NX:~/pcd2pgm_test/src$ catkin_init_workspace
Creating symlink "/home/nvidia/pcd2pgm_test/src/CMakeLists.txt" pointing to "/opt/ros/melodic/share/catkin/cmake/toplevel.cmake"
nvidia@Xavier-NX:~/pcd2pgm_test/src$ git clone https://github.com/hujiax380/pcd2pgm.git修改点云的路径为自己的点云数据:
这是我的4D毫米波雷达对外界场景点云进行滤波后的一份PCD数据:
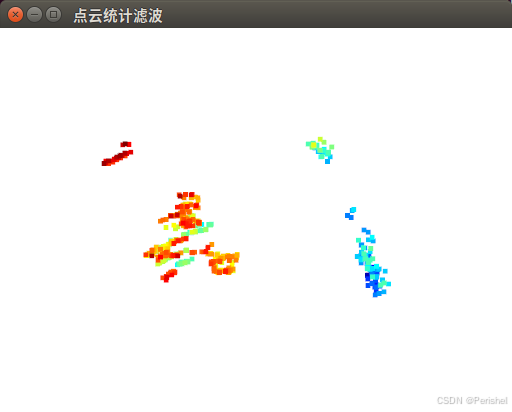
代码部分:修改自己的PCD文件路径和PCD文件名
#include <ros/ros.h>
#include <nav_msgs/OccupancyGrid.h>
#include <nav_msgs/GetMap.h>
#include <sensor_msgs/PointCloud2.h>
#include <pcl/io/pcd_io.h>
#include <pcl_conversions/pcl_conversions.h>
#include <pcl/point_types.h>
std::string file_directory;
std::string file_name;
std::string pcd_file;
std::string map_topic_name;
const std::string pcd_format = ".pcd";
nav_msgs::OccupancyGrid map_topic_msg;
double map_resolution = 0.05;
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_after_PassThrough(new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_after_Radius(new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZ>::Ptr pcd_cloud(new pcl::PointCloud<pcl::PointXYZ>);
void SetMapTopicMsg(const pcl::PointCloud<pcl::PointXYZ>::Ptr cloud, nav_msgs::OccupancyGrid& msg);
int main(int argc, char** argv)
{
ros::init(argc, argv, "pcl_filters");
ros::NodeHandle nh;
ros::NodeHandle private_nh("~");
ros::Rate loop_rate(1.0);
private_nh.param("file_directory", file_directory, std::string("/home/nvidia/PCD_test_data/"));//此处需要修改为自己pcd文件的路径
ROS_INFO("*** file_directory = %s ***\n", file_directory.c_str());
private_nh.param("file_name", file_name, std::string("test"));//此处"pcd_name"需要修改为自己的pcd文件名,无需.pcd
ROS_INFO("*** file_name = %s ***\n", file_name.c_str());
pcd_file = file_directory + file_name + pcd_format;
ROS_INFO("*** pcd_file = %s ***\n", pcd_file.c_str());
private_nh.param("map_resolution", map_resolution, 0.05);
private_nh.param("map_topic_name", map_topic_name, std::string("map"));
ros::Publisher map_topic_pub = nh.advertise<nav_msgs::OccupancyGrid>(map_topic_name, 1);
if (pcl::io::loadPCDFile<pcl::PointXYZ> (pcd_file, *pcd_cloud) == -1)
{
PCL_ERROR ("Couldn't read file: %s \n", pcd_file.c_str());
return (-1);
}
std::cout << "输入点云点数:" << pcd_cloud->points.size() << std::endl;
SetMapTopicMsg(pcd_cloud, map_topic_msg);
while(ros::ok())
{
map_topic_pub.publish(map_topic_msg);
loop_rate.sleep();
ros::spinOnce();
}
return 0;
}
void SetMapTopicMsg(const pcl::PointCloud<pcl::PointXYZ>::Ptr cloud, nav_msgs::OccupancyGrid& msg)
{
msg.header.seq = 0;
msg.header.stamp = ros::Time::now();
msg.header.frame_id = "map";
msg.info.map_load_time = ros::Time::now();
msg.info.resolution = map_resolution;
double x_min, x_max, y_min, y_max; //这里是投影到xy平面,如果要投到xz/yz,这里以及后面的xy对应的数据改为你想投影的平面
if(cloud->points.empty())
{
ROS_WARN("pcd is empty!\n");
return;
}
for(int i = 0; i < cloud->points.size() - 1; i++)
{
if(i == 0)
{
x_min = x_max = cloud->points[i].x;
y_min = y_max = cloud->points[i].y;
}
double x = cloud->points[i].x;
double y = cloud->points[i].y;
if(x < x_min) x_min = x;
if(x > x_max) x_max = x;
if(y < y_min) y_min = y;
if(y > y_max) y_max = y;
}
msg.info.origin.position.x = x_min;
msg.info.origin.position.y = y_min;
msg.info.origin.position.z = 0.0;
msg.info.origin.orientation.x = 0.0;
msg.info.origin.orientation.y = 0.0;
msg.info.origin.orientation.z = 0.0;
msg.info.origin.orientation.w = 1.0;
msg.info.width = int((x_max - x_min) / map_resolution);
msg.info.height = int((y_max - y_min) / map_resolution);
msg.data.resize(msg.info.width * msg.info.height);
msg.data.assign(msg.info.width * msg.info.height, 0);
ROS_INFO("data size = %d\n", msg.data.size());
for(int iter = 0; iter < cloud->points.size(); iter++)
{
int i = int((cloud->points[iter].x - x_min) / map_resolution);
if(i < 0 || i >= msg.info.width) continue;
int j = int((cloud->points[iter].y - y_min) / map_resolution);
if(j < 0 || j >= msg.info.height - 1) continue;
msg.data[i + j * msg.info.width] = 100;
}
}
修改完成进行编译:
nvidia@Xavier-NX:~/pcd2pgm_test$ catkin_make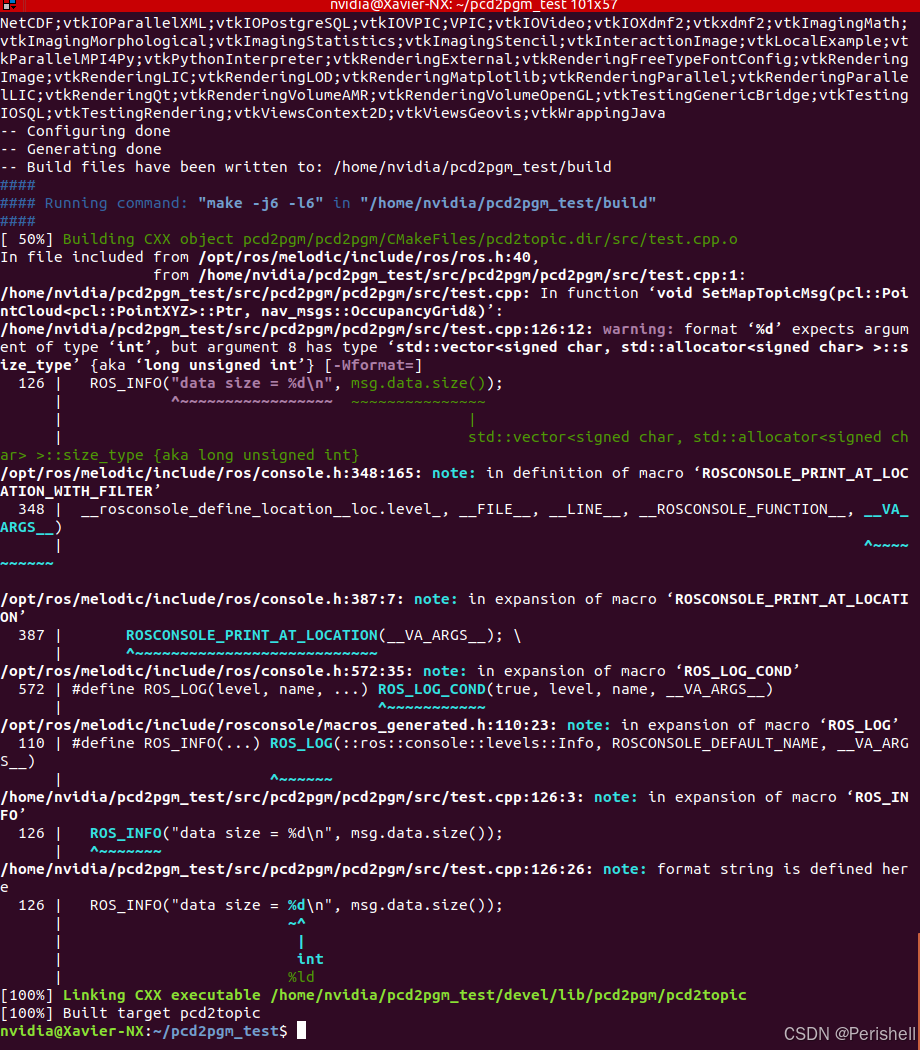
编译完成source一下 :
nvidia@Xavier-NX:~/pcd2pgm_test$ source devel/setup.bash然后打开roscore,打开新终端,进行rosrun:
roscore
rosrun pcd2pgm pcd2topic报错没有包就再source一下

然后另起终端:
nvidia@Xavier-NX:~/pcd2pgm_test$ rosrun map_server map_saver
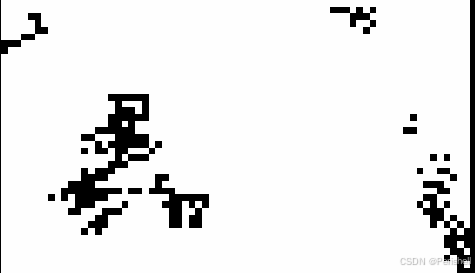
结果:
原点云数据:
分辨率为0.05

分辨率为0.5