问题背景
在牛客网上遇到这样一个问题:
https://www.nowcoder.com/questionTerminal/fcb839e841a74daab2e442f4dba5b707

本来觉得挺简单的一道问题,后来发现并不是那么回事……
我们用眼一看就能看明白的事情,怎么写起程序来就变得这么复杂???
一时之间又想不出来什么好办法,于是去网上找题解吧。
结果找了一圈,大体知道什么意思了,但是没看见自己满意的,于是琢磨着自己写一篇出来,以便后人乘凉。
先说一句,这其实是个数学问题,只是现在要求我们使用编程语言来写出算法而已。那么,我们需要先想明白这个数学问题怎么做,之后再写程序。
解决思路
网上有很多思路,比如面积法、向量法、角度法、交点个数法。我感觉运算比较方便的是向量法。(这里指的运算方便是指便于计算机计算)
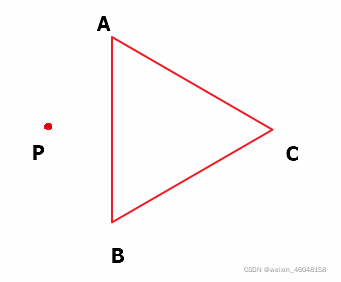
先看看多边形边数 n = 3 n = 3 n=3 的情况,这是个三角形👇
相信你一眼就能看出来 点P在三角形ABC外部
不过我们如何使用数学的语言来表述这个事实呢?
先假定坐标:
P
(
x
0
,
y
0
)
,
A
(
x
1
,
y
1
)
,
B
(
x
2
,
y
2
)
,
C
(
x
3
,
y
3
)
P(x_0, y_0), A(x_1, y_1), B(x_2, y_2), C(x_3, y_3)
P(x0,y0),A(x1,y1),B(x2,y2),C(x3,y3)
上过大学的同学都知道矢量是可以进行叉乘运算的,比如
A
B
→
×
A
P
→
\overrightarrow{AB} × \overrightarrow{AP}
AB×AP
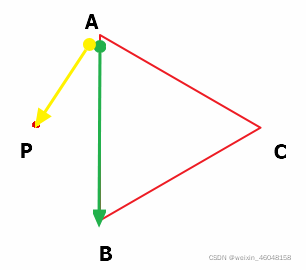
得到的结果是一个向量,这个向量的方向垂直于纸面(也就是图中三角形所在的平面),至于方向具体是向内还是向外,则要看AB与AP的位置关系。我们使用右手定则就可以判断。图中
A
B
×
A
P
AB × AP
AB×AP的方向是垂直于纸面向内的。
要是使用行列式来计算
A
B
→
×
A
P
→
\overrightarrow{AB} × \overrightarrow{AP}
AB×AP结果的话,大概是这样👇
∣
x
2
−
x
1
y
2
−
y
1
x
0
−
x
1
y
0
−
y
1
∣
\begin{vmatrix} x_2 - x_1 & y_2 - y_1 \\ x_0 - x_1 & y_0 - y_1 \\ \end{vmatrix}
x2−x1x0−x1y2−y1y0−y1
行列式的计算方法不再赘述,想必大家都会,不会就百度吧。
当然,使用计算机来计算会很快。
我们需要的是这个行列式的结果的正负性,它表现了两个向量的位置关系,如果结果为正,说明第二个向量在第一个向量的逆时针方向,反之,说明第二个向量在第一个向量的顺时针方向
【注意】这里的顺时针和逆时针是从咱们读者的角度观察得到的,也就是正对屏幕向里的方向。另外,顺时针与逆时针的角度都不能大于180度!不然就乱套了,这样的说法也就失效了。
其实也可以换一种说法,使用向量与点的相对位置关系,
将向量AB看作是一个以A为转动中心, B为转动末端的一个指针,
若点P在指针顺时针转动180度以内的方向上,等价于 A B → × A P → \overrightarrow{AB} × \overrightarrow{AP} AB×AP 使用行列式计算的结果 < 0;
若点P在指针逆时针转动180度以内的方向上,等价于 A B → × A P → \overrightarrow{AB} × \overrightarrow{AP} AB×AP 使用行列式计算的结果 > 0;
若点P恰好在向量AB所在的直线上,则行列式的计算结果为0 (向量AB与AP共线);
严格地讲,两个向量进行叉积运算地结果是向量,不能与数量 0 比较大小,但为了我们讨论问题方便,直接使用行列式的计算结果的正负来代替原来叉积的方向了,请不要dui我.
聪明的读者应该猜到判断的方法了,没错,就是不断计算
A
B
→
×
A
P
→
\overrightarrow{AB} × \overrightarrow{AP}
AB×AP
B
C
→
×
B
P
→
\overrightarrow{BC} × \overrightarrow{BP}
BC×BP
C
A
→
×
C
P
→
\overrightarrow{CA} × \overrightarrow{CP}
CA×CP
如果上面三个式子的正负性相同,说明,点P就在三角形ABC的内部!
需要注意,上面的式子具有轮换对称性,每个式子左边的向量都对应三角形的一条边,而且三个位于式子左边的向量首尾相接正好 “围成一圈”!
我在上面画出的三角形ABC的三个顶点
A
,
B
,
C
A, B, C
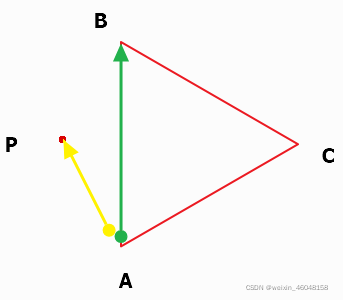
A,B,C是逆时针方向分布的,下面再来一个顺时针分布的👇
这时候
A
B
→
×
A
P
→
\overrightarrow{AB} × \overrightarrow{AP}
AB×AP 的方向正好与前一种相反!
此时,可以使用计算机进行如下计算,
A
B
→
×
A
P
→
\overrightarrow{AB} × \overrightarrow{AP}
AB×AP的结果 > 0 (表示点P在向量AB的左侧)
B
C
→
×
B
P
→
\overrightarrow{BC} × \overrightarrow{BP}
BC×BP的结果 < 0 (表示点P在向量BC的右侧)
C
A
→
×
C
P
→
\overrightarrow{CA} × \overrightarrow{CP}
CA×CP的结果 < 0 (表示点P在向量CA的右侧)
由于这三个式子最终的结果的正负不一样,我们有理由判定 “点P不在三角形ABC之中”
口诀就是,都在同一侧则在其内,不都在同一侧则在其外
当然,如果某一个式子的结果为0,说明点 P 在三角形的某一条边所在的直线上,
以
A
B
→
×
A
P
→
\overrightarrow{AB} × \overrightarrow{AP}
AB×AP 的结果 = 0 为例,
可能有如下的五种情况,
我们不认为点P1、P2、P3在三角形内部(Inside the triangle),这三个点应该看作是“在三角形上(On the triangle)”的.
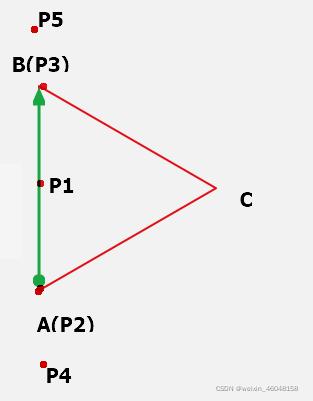
至于 P4、P5,则是 “在三角形外(Outside the triangle)”
所以行列式的值为 0 能够推出来两种情况,不能简单认为一定是在三角形外或者上.
好说, 如果 A . x ⩽ P . x ⩽ B . x A.x \leqslant P.x \leqslant B.x A.x⩽P.x⩽B.x 或者 B . x ⩽ P . x ⩽ A . x B.x \leqslant P.x \leqslant A.x B.x⩽P.x⩽A.x, 说明点 P在线段AB上.
(这里使用横坐标,其实使用纵坐标也是一样的)
(这里突然使用了面向对象的写法, 只是感觉表达效果更好而已, A, B, P都是Point的实例, 都具有横坐标属性x, 各位程序员伙伴们早就见怪不怪了~)
好了, 都到这里了, 其实大家应该能看出来, 上面的方法可以扩展到任意的凸多边形, 凹的不行! ! !
只要给出的点是按逆时针顺序或者顺时针顺序能够组成凸多边形`就行.
关于如何判断一组点的序列是否是按顺时针或者逆时针分布的, 以及这些点是否能够构成凸多边形, 本篇文章不再讨论. 若本篇读者反馈良好, 后续可能会更.
代码实现 C++
注意: 在C++中, 大部分小数的表示是不精确的, 因此, 在比较一个计算结果与 0 的关系时, 通常使用
1e-6来代替 0. 比如, 假设有一个浮点数num, 我们想知道它是不是等于 0, 我们需要这样写if (abs(num) <= 1e-6)(1e-6就是1乘以10的-6次方); 想知道它是不是小于0, 需要if (num < -1e-6); 想知道它是不是大于0, 需要if (num > 1e-6)
// C++ 代码如下
/* 已知四边形的四个点,求一个点是否在四边形之内的解决方法 */
/* 已知四边形(凸四边形)的四个点A、B、C、D(按逆时针顺序)的坐标,
求点P是否在ABCD所围成的四边形内,可以通过向量叉乘的方法实现。
*/
#include <iostream>
#include <vector>
#include <algorithm>
using namespace std;
struct Point {
double x, y;
Point(double x = 0, double y = 0) : x(x), y(y) {}
Point operator-(const Point &b) const { // 求向量
return Point(x - b.x, y - b.y);
}
double operator*(const Point &b) const { //叉乘
return x * b.y - y * b.x;
}
};
class PointInPolygon {
public:
bool isPointInPolygon(vector<Point>& points, Point p) {
int n = points.size();
int leftcnt = 0; // 若点P出现在一个向量的左侧, 则该变量加1
int rightcnt = 0; // 若点P出现在一个向量的右侧, 则该变量加1
for (int i = 0; i < n; ++i) {
Point AB = points[(i + 1) % n] - points[i]; // B - A 即为向量 AB
Point AP = p - points[i]; // P - A 即为向量 AP
/* 没想到吧, 其实向量也可以使用点的坐标进行表示!! */
auto cross_product = AB * AP;
if (cross_product > 1e-6) {
// 如果向量叉乘大于0,则点p在向量AB的左侧,
/* 1e-6 是为了避免浮点数的误差*/
++leftcnt;
} else if (cross_product < -1e-6) { // 点P 在向量AB的右侧
++rightcnt;
}
}
return leftcnt == n || rightcnt == n;
}
};
// 测试用例:
int main() {
PointInPolygon p;
vector<Point> points = {Point(0, 0), Point(0, 1), Point(1, 1), Point(1, 0)};
// 输入的点必须按照 逆时针顺序 或者 顺时针顺序 且能够构成凸多边形, 否则判断结果不正确!
// Should Output 0
cout << p.isPointInPolygon(points, Point(-1, -1)) << endl;
cout << p.isPointInPolygon(points, Point(0, 0)) << endl;
cout << p.isPointInPolygon(points, Point(1, 1)) << endl;
// Should Output 1
cout << p.isPointInPolygon(points, Point(0.5, 0.5)) << endl;
cout << p.isPointInPolygon(points, Point(0.2, 0.8)) << endl;
return 0;
}
尾声 & 琐记
凸多边形的性质: 外角和360° (不管有多少条边)
继续发展下去可以得到 高斯-博内公式
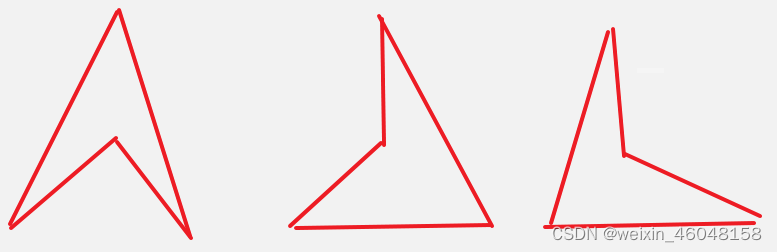
任意给出4个点, 不一定能组成凸多边形, 也不一定能组成凹多边形, 如果能组成凹多边形, 不只有一种情况.
在下面这三张图里, 我已经 “尽力” 表现出了这样一个事实: 给定四个点可以组成凹多边形, 但是有三种情况,凹陷的部分不一样.
凹多边形可以看成是由大的凸多边形扣除小的凸多边形得到的.
有一篇文章提到利用面积进行四边形的凸凹性判断: https://blog.csdn.net/xinyu391/article/details/92685023
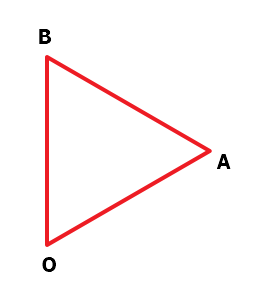
值得注意的是, 求三角形的面积不需要海伦公式. 因为海伦公式适合已知三角形的三条边长求面积, 现在只知道三个点的坐标, 转化成边的长度需要开平方, 计算代价很大. 最好的办法是:使用向量叉积
S
△
A
B
C
=
1
2
×
∣
O
A
→
×
O
B
→
∣
S_\triangle{ABC} = \frac{1}{2}\times |\overrightarrow {OA} \times \overrightarrow {OB}|
S△ABC=21×∣OA×OB∣
发现了一些有价值的资料: