1.算法原理
1.1原理
体素下采样是一种常用的点云处理技术,主要用于降低点云的密度,减少数据量,同时保持点云的特征。它通过在三维空间中定义一个体素网格,然后将每个体素内的点云数据替换为一个单独的点来实现。体素的大小可以根据需求进行调整,较大的体素会导致更大的下采样程度,而较小的体素则会保留更多的原始数据。
一般最常用的下采样方法为体素化网格的采样方法,即减少点的数量,并同时保持点云的形状特征基本不变,同时基本上保留了空间结构信息。在点云配准、曲面重建、形状识别等算法速度中非常实用。
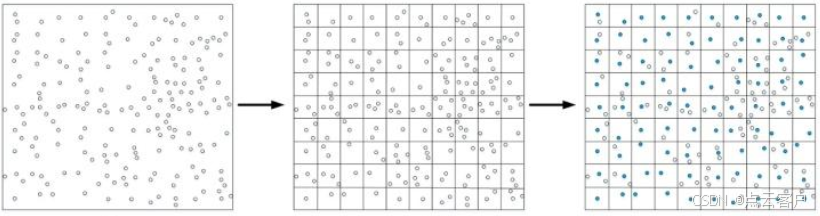
体素下采样的原理如图所示,首先将点云空间进行网格化,也称体素化,即图(b),网格化后的每一个格子称为体素,在这些划分为一个个极小的格子中包含一些点,然后对这些点取平均或加权平均得到一个点,以此来替代原来网格中所有的点,即图(c)中蓝色的点。显然,网格选取越大则采样之后的点云越少,处理速度变快,但会对原先点云过度模糊,网格选取越小,则作用相反。
1.2算法流程
体素下采样的实现原理如下:
-
定义体素网格:将点云空间划分为一个个小的立方体(体素)。
-
选择代表点:在每个体素内,选择一个点作为该体素的代表点。通常选择距离体素中心最近的点作为代表点。
-
生成