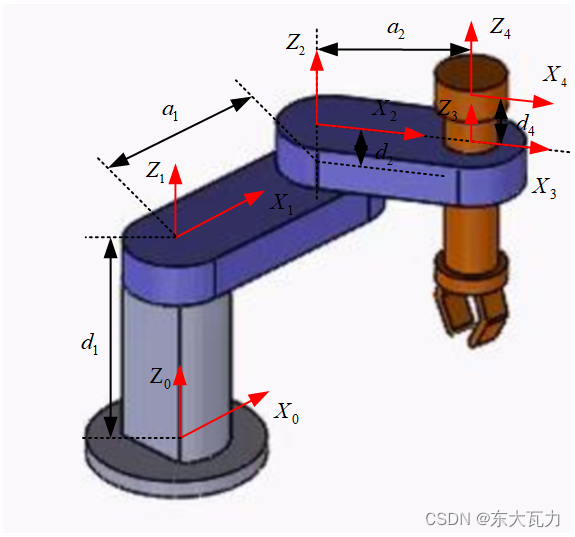
1.SCARA机器人结构

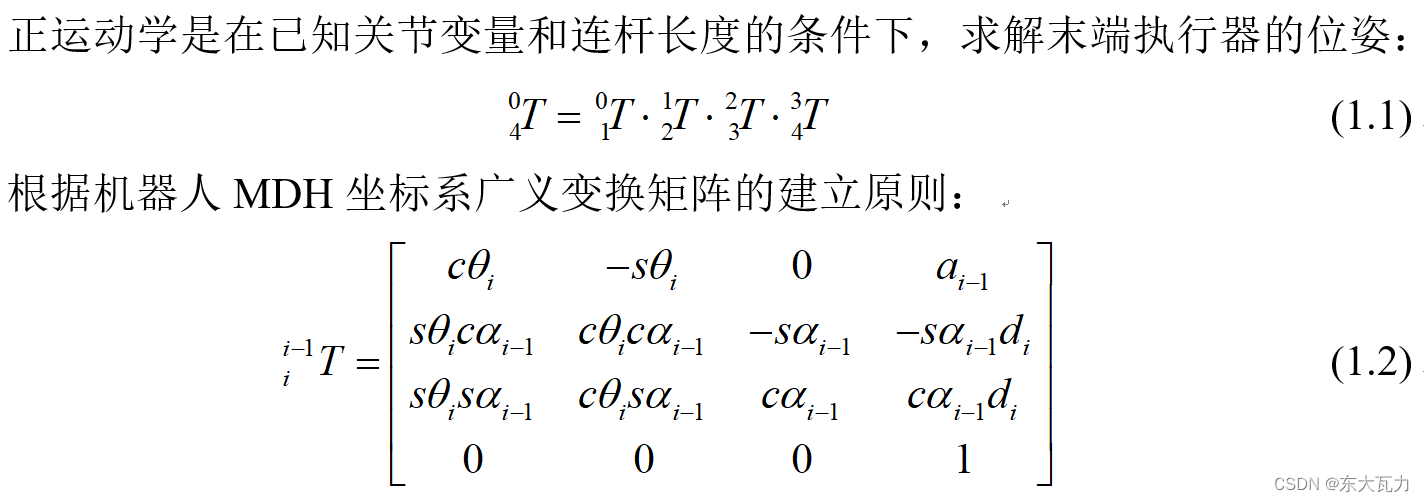
2.MDH建模
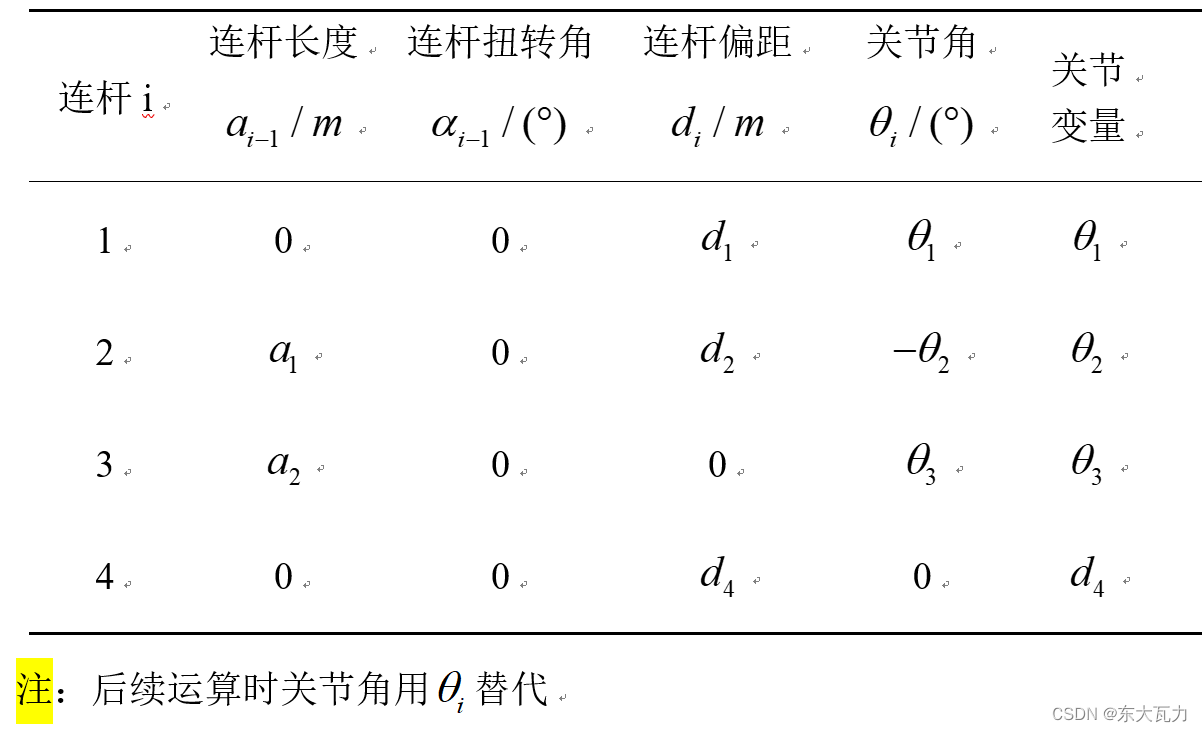
采用MDH参数法建立运动学坐标系模型,采用该方法建立如图机械臂坐标系模型,得到如表所示的MDH参数表。
过程细节参看往期文章:
链接: 机器人学导论-运动学(1)
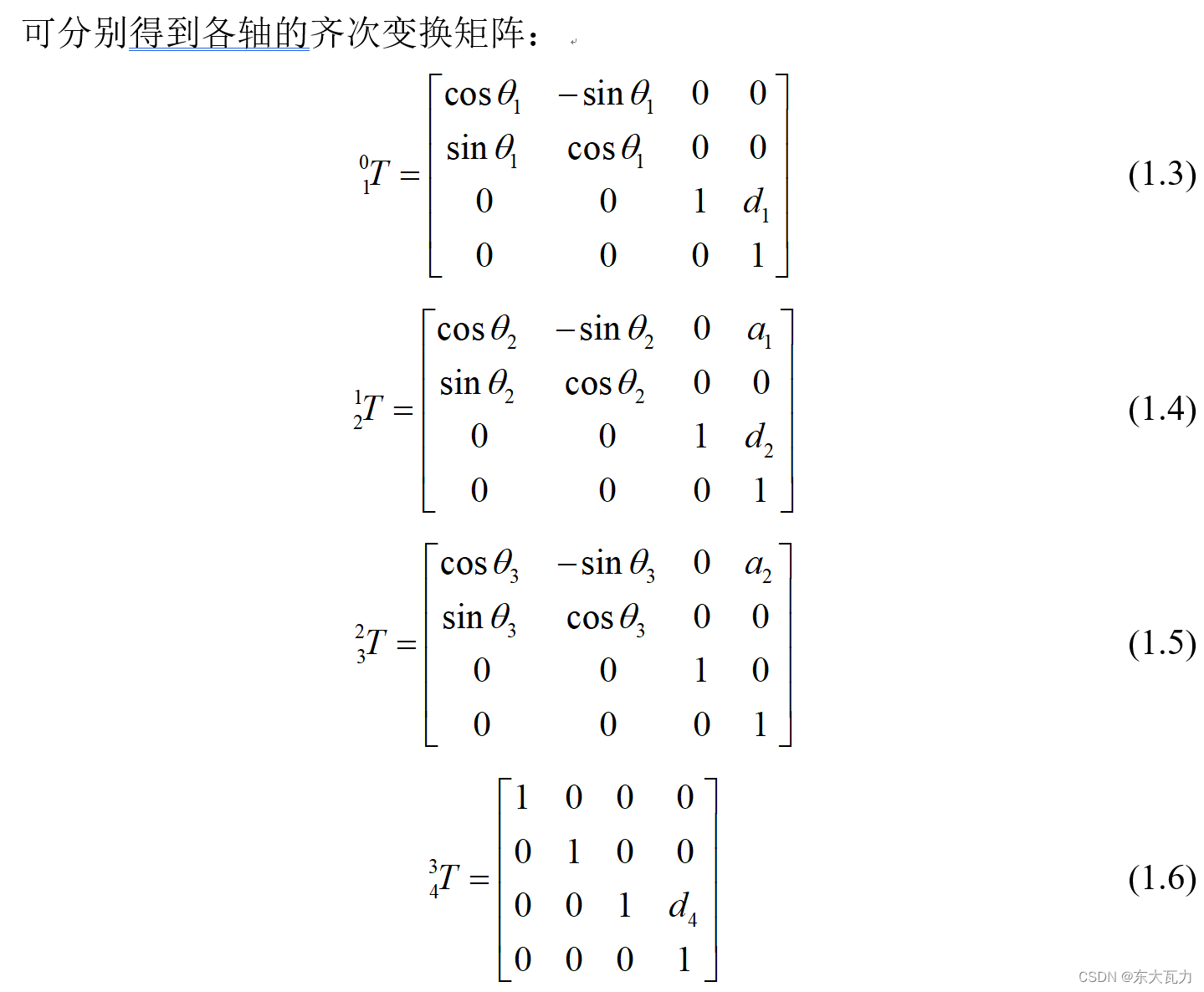
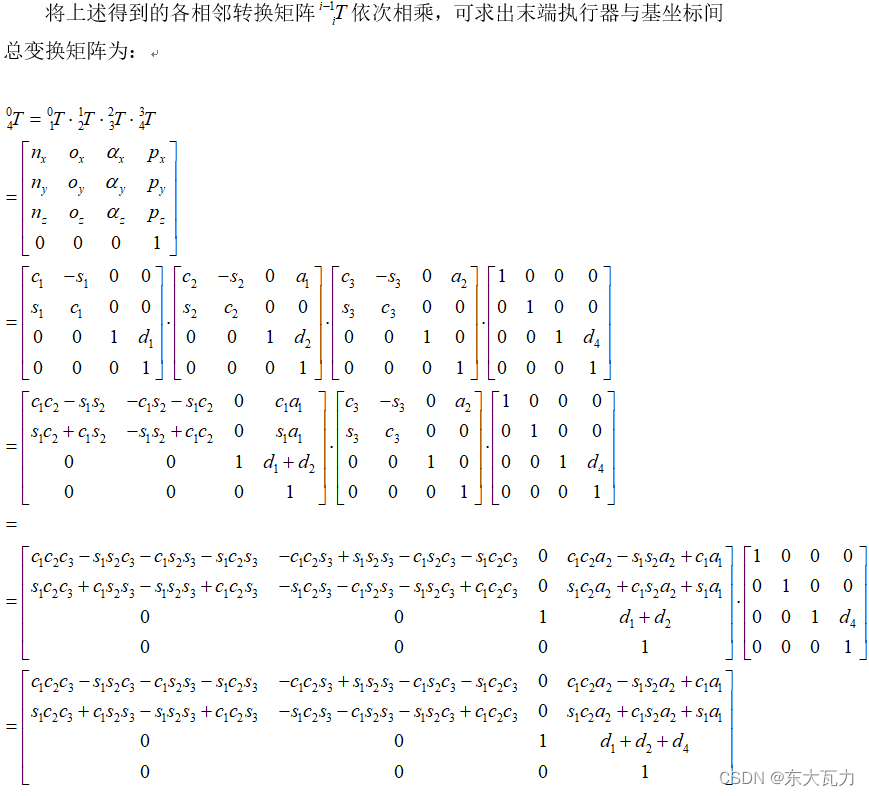
3.正运动学
采用MDH参数法建立运动学坐标系模型,采用该方法建立如图机械臂坐标系模型,得到如表所示的MDH参数表。
过程细节参看往期文章:
链接: 机器人学导论-运动学(1)
道可道,非常道;名可名,非常名。 无名,天地之始,有名,万物之母。 故常无欲,以观其妙,常有欲,以观其徼。 此两者,同出而异名,同谓之玄,玄之又玄,众妙之门。