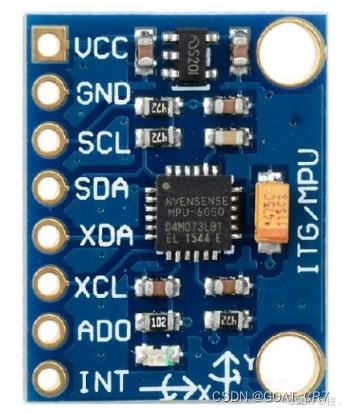
硬件图片
需要新建的文件夹
1、MPU6050_Reg.h文件内容
#ifndef __MPU6050_REG_H
#define __MPU6050_REG_H
#define MPU6050_SMPLRT_DIV 0x19
#define MPU6050_CONFIG 0x1A
#define MPU6050_GYRO_CONFIG 0x1B
#define MPU6050_ACCEL_CONFIG 0x1C
#define MPU6050_ACCEL_XOUT_H 0x3B
#define MPU6050_ACCEL_XOUT_L 0x3C
#define MPU6050_ACCEL_YOUT_H 0x3D
#define MPU6050_ACCEL_YOUT_L 0x3E
#define MPU6050_ACCEL_ZOUT_H 0x3F
#define MPU6050_ACCEL_ZOUT_L 0x40
#define MPU6050_TEMP_OUT_H 0x41
#define MPU6050_TEMP_OUT_L 0x42
#define MPU6050_GYRO_XOUT_H 0x43
#define MPU6050_GYRO_XOUT_L 0x44
#define MPU6050_GYRO_YOUT_H 0x45
#define MPU6050_GYRO_YOUT_L 0x46
#define MPU6050_GYRO_ZOUT_H 0x47
#define MPU6050_GYRO_ZOUT_L 0x48
#define MPU6050_PWR_MGMT_1 0x6B
#define MPU6050_PWR_MGMT_2 0x6C
#define MPU6050_WHO_AM_I 0x75
#endif
MPU6050.h文件内容
#ifndef __MPU6050_H
#define __MPU6050_H
#include "stm32f10x.h"
void MPU6050_writeReg(uint8_t RegAddress,uint8_t Data);
uint8_t MPU6050_ReadReg(uint8_t RegAddress);
void MPU6050_Init(void);
void MPU6050_GetData(int16_t *AccX,int16_t *AccY,int16_t *AccZ,
int16_t *GyroX,int16_t *GyroY,int16_t *GyroZ);
uint8_t MPU6050_GetID(void);
#endif
2、写MPU6050寄存器函数
2.1写单个字节

#include "MPU6050.h"
#include "I2C.h"
#include "MPU6050_Reg.h"
#define MPU6050_ADDRESS 0xD0
void MPU6050_writeReg(uint8_t RegAddress,uint8_t Data)
{
MyI2C_Start();
MyI2C_SendByte(MPU6050_ADDRESS);
MyI2C_ReceiveAck();
MyI2C_SendByte(RegAddress);
MyI2C_ReceiveAck();
MyI2C_SendByte(Data);
MyI2C_ReceiveAck();
MyI2C_Stop();
}
3、读MPU6050寄存器函数
3.1读单个字节:

uint8_t MPU6050_ReadReg(uint8_t RegAddress)
{
uint8_t Data;
MyI2C_Start();
MyI2C_SendByte(MPU6050_ADDRESS);
MyI2C_ReceiveAck();
MyI2C_SendByte(RegAddress);
MyI2C_ReceiveAck();
MyI2C_Start();
MyI2C_SendByte(MPU6050_ADDRESS | 0X01);
MyI2C_ReceiveAck();
Data = MyI2C_ReceiveByte();
MyI2C_SendAck(1);
MyI2C_Stop();
return Data;
}
4、初始化MPU6050函数
void MPU6050_Init(void)
{
MyI2C_Init();
MPU6050_writeReg(MPU6050_PWR_MGMT_1,0x01);
MPU6050_writeReg(MPU6050_PWR_MGMT_2,0x02);
MPU6050_writeReg(MPU6050_SMPLRT_DIV,0x09);
MPU6050_writeReg(MPU6050_CONFIG,0x06);
MPU6050_writeReg(MPU6050_GYRO_CONFIG,0x18);
MPU6050_writeReg(MPU6050_ACCEL_CONFIG,0x18);
}
5、读取MPU6050设备ID函数(不要这个函数也是可以的)
uint8_t MPU6050_GetID(void)
{
return MPU6050_ReadReg(MPU6050_WHO_AM_I);
}
6、读取加速度计、陀螺仪原始数值
void MPU6050_GetData(int16_t *AccX,int16_t *AccY,int16_t *AccZ,
int16_t *GyroX,int16_t *GyroY,int16_t *GyroZ)
{
uint8_t DataL;
uint8_t DataH;
DataH = MPU6050_ReadReg(MPU6050_ACCEL_XOUT_H);
DataL = MPU6050_ReadReg(MPU6050_ACCEL_XOUT_L);
*AccX = (DataH << 8) | DataL;
DataH = MPU6050_ReadReg(MPU6050_ACCEL_YOUT_H);
DataL = MPU6050_ReadReg(MPU6050_ACCEL_YOUT_L);
*AccY = (DataH << 8) | DataL;
DataH = MPU6050_ReadReg(MPU6050_ACCEL_ZOUT_H);
DataL = MPU6050_ReadReg(MPU6050_ACCEL_ZOUT_L);
*AccZ = (DataH << 8) | DataL;
DataH = MPU6050_ReadReg(MPU6050_GYRO_XOUT_H);
DataL = MPU6050_ReadReg(MPU6050_GYRO_XOUT_L);
*GyroX = (DataH << 8) | DataL;
DataH = MPU6050_ReadReg(MPU6050_GYRO_YOUT_H);
DataL = MPU6050_ReadReg(MPU6050_GYRO_YOUT_L);
*GyroY = (DataH << 8) | DataL;
DataH = MPU6050_ReadReg(MPU6050_GYRO_ZOUT_H);
DataL = MPU6050_ReadReg(MPU6050_GYRO_ZOUT_L);
*GyroZ = (DataH << 8) | DataL;
}
7、main函数
#include "stm32f10x.h"
#include "Delay.h"
#include "OLED.h"
#include "MPU6050.h"
int16_t AX,AY,AZ,GX,GY,GZ;
uint8_t ID;
int main(void)
{
OLED_Init();
MPU6050_Init();
OLED_ShowString(1,1,"ID");
ID = MPU6050_GetID();
OLED_ShowHexNum(1,4,ID,2);
while(1)
{
MPU6050_GetData(&AX,&AY,&AZ,&GX,&GY,&GZ);
OLED_ShowSignedNum(2,1,AX,5);
OLED_ShowSignedNum(3,1,AY,5);
OLED_ShowSignedNum(4,1,AZ,5);
OLED_ShowSignedNum(2,8,GX,5);
OLED_ShowSignedNum(3,8,GY,5);
OLED_ShowSignedNum(4,8,GZ,5);
}
}