视觉 SLAM 十四讲 —— 第七讲 视觉里程计1
前六讲介绍了 SLAM 会用到的基础知识,从这一讲将开始实际介绍 SLAM 的四个模块:视觉前端,优化后端,回环检测和地图构建。而视觉前端又被称为视觉里程计(Visual Odometry, VO),它根据相邻图像的信息,估计出粗略的相机运动,给后端提供较好的初始值。而根据是否需要提取特征,又分为特征点法和非特征点法。而由于基于特征点的前端运行稳定,对光照、动态物体不敏感,是当前 VO 的主流方法。
特征点法
特征点法通过提取图像中稳定、有特点的特征来描述图像,从而在更小的数据量上实现图像的描述。比较经典的人工特征包括 SIFT,SURF 和 ORB 等。
- SIFT(尺度不变特征变换,Scale-Invariant Feature Transform)充分考虑了在图像变换过程中出现光照,尺度,旋转等变化,在所有人工特征点中性能可以说是最优的。但随之而来的是极大的计算量,而由于 SLAM 需要实时提取特征,SIFT 现阶段还无法满足实时性的要求,因此在 SLAM 中很好使用 SIFT 特征。
- ORB 特征(Oriented FAST and Rotated BRIEF)通过改进 FAST 关键点使其具有了方向性,并采用二进制描述子 BRIEF 使得图像特征提取大大加速。
特征点提取速度对比(在同一副图像上提取约 1000 个特征点):ORB 约要花费 15.3ms,SURF 约花费 217.3ms,SIFT 约花费 5228.7ms
由于 ORB 在质量和性能之间的良好平衡,现阶段 SLAM 主要都是基于 ORB 进行开发的。
ORB 特征
上面提到在 ORB 中实际使用到了 FAST 关键点提取方法和 BRIEF 描述子生成方法。下面分别介绍一下两个方法的操作流程。
FAST 关键点
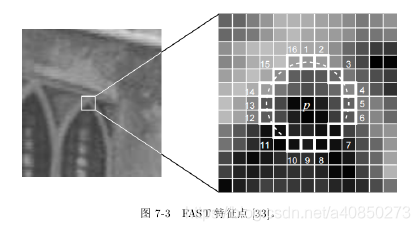
FAST 关键点优化:
- 为了进一步提高速度,还可以通过直接检测 1,5,9,13 四个像素的亮度,只有这四个像素中有三个同事大于
或小于
时,才会进行后续的判断。
- 为解决 FAST 存在的特征点扎堆的情况,在第一遍检测后还会进行极大值抑制,在一定区域内仅保留响应极大值的角点。
- 为了能够指定提取的特征点数量,可以对原始 FAST 角点分别计算 Harris 响应值,然后选取前 N 个具有最大响应值的角点
- 使用图像金字塔解决不具备尺度不变性的问题
- 使用灰度质心法(选取几何中心到灰度质权重中心的向量作为特征点方向)提取方向信息
BRIEF 描述子
BRIEF 是一种二进制描述子,起选取关键点附近有顺序的两个像素,如果第一个大于第二个则取1,否则取0。如果选取了128对这样的像素对,那么 BRIEF 就是128维由0,1构成的向量。而关于像素对的选择有很多方法,BRIEF使用随机选点的方式,提高计算速度。
同时为了利用上面FAST提取的方向信息,这里对BRIEF进行改进,计算旋转之后的“steer BRIEF”,使得BRIEF具备了较好的旋转不变性
特征匹配是SLAM中极为关键的一步,其确定了当前看到的路标与之前看到的路标之间的对应关系。然而由于图像特征的局部特性,误匹配的情况广泛存在,目前已经成为SLAM中制约性能提升的一大瓶颈。
特征提取结束之后就是特征点的匹配,常用的有暴力匹配(Brute-Force Matcher,直接计算所有关键点之间的距离,然后选取距离最小的进行关联),快速近似最近邻(FLANN,通过构建检索结构加速匹配数据,适合特征点特别多的情况)。
2D-2D:对极几何
在获取了两张图像的对应关系之后,需要根据2D的对应关系,求解3D相机的运动情况,这个问题则通过对极几何来解决。
对极约束
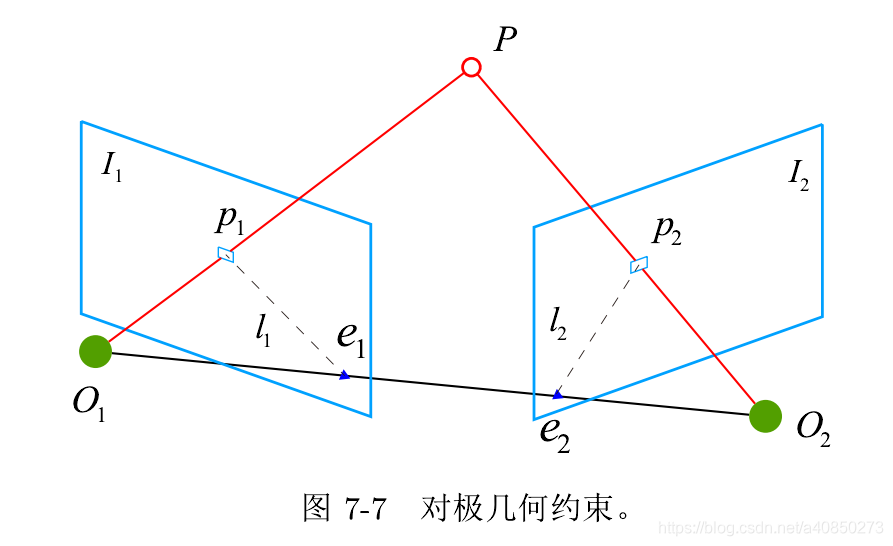
根据第五讲中介绍的针孔相机模型,可得
其中 

经过一系列等价变换,可得如下对极约束等式
上述等式中包含了平移和旋转,如果将中间部门抽象为基础矩阵 

因此相机位姿估计问题变为先求解基础矩阵和本质矩阵,再结合相机内参得到旋转矩阵和平移向量。
本质矩阵
本质矩阵是一个
- 由于对极约束等式为零,因此对本质矩阵乘以任意非零常数后,对极约束依然满足。这被称为本质矩阵在不同尺度下是等价的。
- 可以证明,本质矩阵的特征值满足
的形式,这被称为本质矩阵的内在性质。
- 本质矩阵实际上只有五个自由度。
不过由于本质矩阵的内在性质是一种非线性性质,因此如果只用五个点求解起来会非常困难。通常使用八点法(利用八个点对进行估计),因为只用到了线性性质,因此可以在线性代数框架下求解。
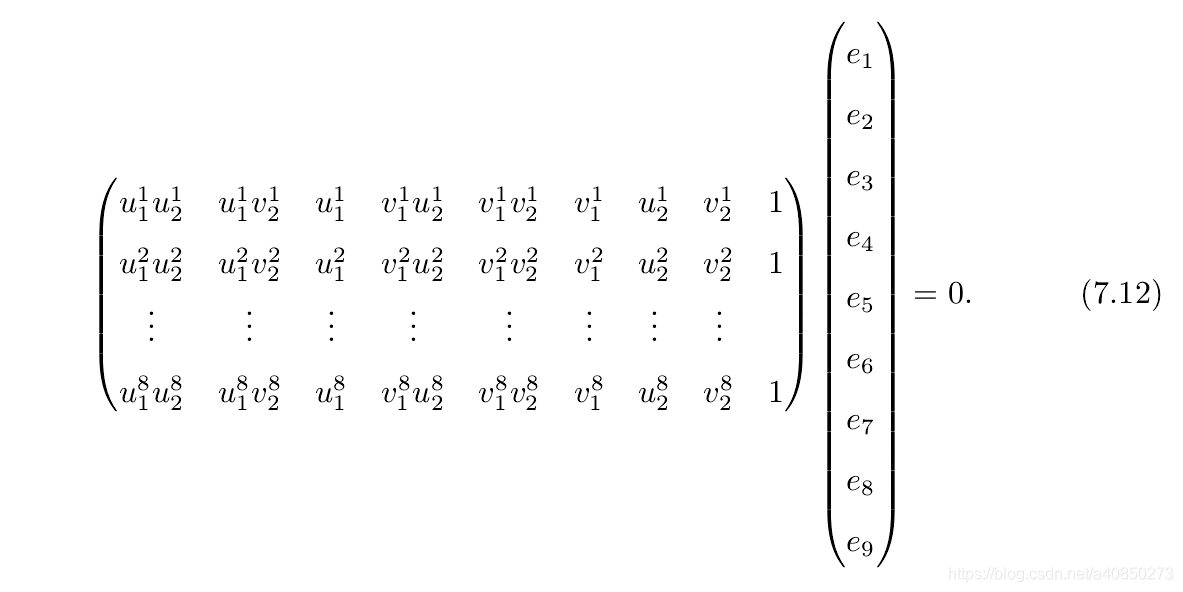
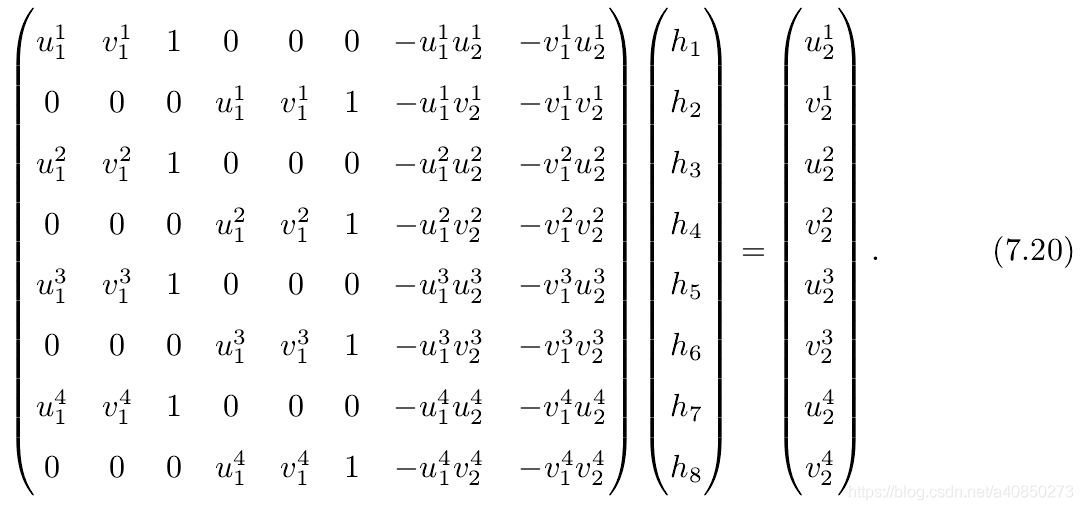
其中
![x_1^i=[u_1^i,v_1^i,1],x_2^i=[u_2^i,v_2^i,1]](/image/aHR0cHM6Ly9wcml2YXRlLmNvZGVjb2dzLmNvbS9naWYubGF0ZXg%2FeF8xJTVFaSUzRCU1QnVfMSU1RWklMkN2XzElNUVpJTJDMSU1RCUyQ3hfMiU1RWklM0QlNUJ1XzIlNUVpJTJDdl8yJTVFaSUyQzElNUQ%3D)
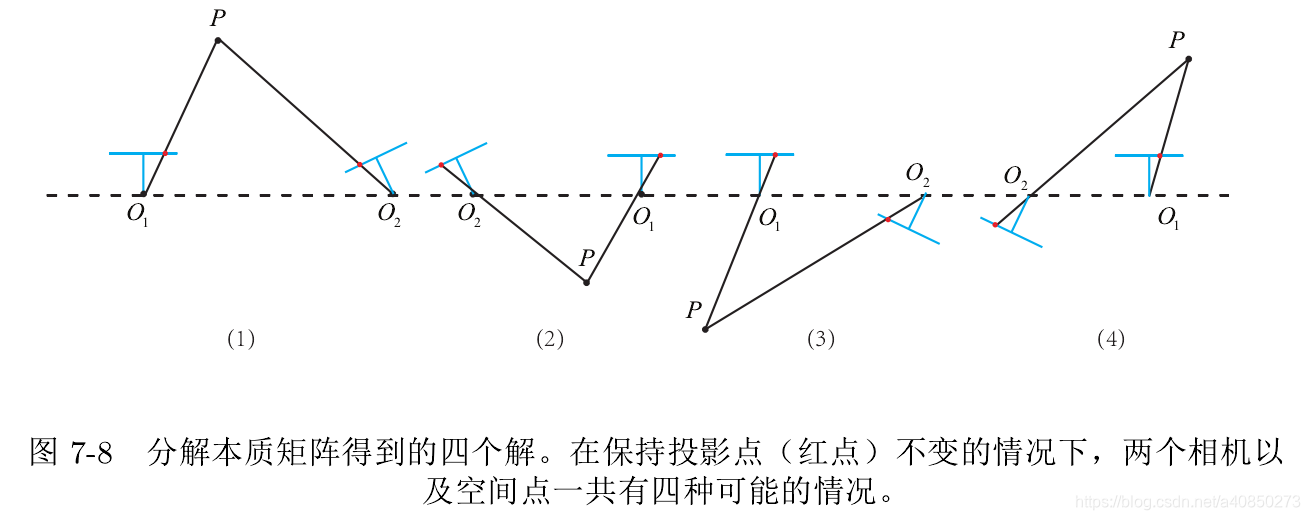
求解上述线性方程可能存在四个解,不过好在四个解中只有一个在两个相机中都具有正的深度。因此只需要把任意一点代入四组解,只有都具有正深度的才是正确的解。
在求得E之后,对E进行SVD分解就可以得到两组旋转矩阵和平移向量

其中
最后由于直接求得的E可能不满足内在性质(特征值),因此在对E进行SVD分解()后用下式求解。
这本质相当于将求出来的矩阵投影到了E所在的流形上。更简单的做法是由于E具有尺度等价性,可以将奇异值矩阵直接取成
单应矩阵
单应矩阵H描述的是两个平面之间的映射关系。比如场景中的特征点都落在同一个平面上(比如墙,地面等),则可以通过单应性来进行运动估计。
将特征点平面描述为
据此可以得到对应两个点的对应关系如下
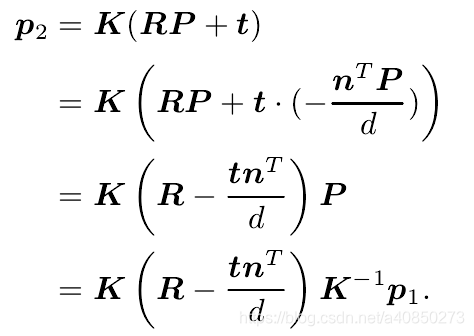
这里,我们将中间的部分称为单应矩阵
其对应求解与本质矩阵类似,
单应性在SLAM中具有重要意义。当特征共面,或者相机发生纯旋转的时候,基础矩阵的自由度下降,这就出现了所谓的退化。不过现实中的数据总包含一些噪声,这时候如果我们继续使用八点法求解基础矩阵,基础矩阵多余出来的自由度将会主要由噪
声决定。为了能够避免退化现象造成的影响,通常我们会同时估计基础矩阵和单应矩阵,选择重投影误差比较小的那个作为最终的运动估计矩阵。
讨论
尺度不确定性
单目SLAM基于两张图像无法获取尺度信息,因此E本身具有尺度等价性,从而求得到R,t也有一个尺度等价性。即如果求得的t第一维为0.822,此时无法确定单位是米还是厘米。因为对t乘以任意比例常数后,对极约束依然是成立的。
不过虽然我们不知道它的实际长度是多少,但我们以初始化的t的单位为1来计算相机运动和特性点的3D位置,这称为单目SLAM初始化。需要注意的是初始化两张图片必须有一定程度的平移,而后的轨迹和地图都将以此步的平移为单位。
初始化的纯旋转问题
单目初始化不能只有纯旋转,必须要有一定程度的平移。不过,如果相机只平移不旋转,就更容易让单目SLAM初始化。因此有经验的SLAM研究人员,在单目SLAM情况下,经常选择对相机进行左右平移以顺利地进行初始化。
多于八对点的情况
如果匹配对多于八个,那么可以将其转换一个最小二乘问题
不过由于噪声的存在,实际中更倾向于使用随机采样一致性(Random Sample Concensus, RANSAC)来求解。
三角测量
通过对极几何求得相机运动之后,由于单张图像无法获取像素的深度信息,因此单目SLAM中需要通过三角测量的方法来估计地图点的深度。
三角测量是指,通过在两处观察同一个点的夹角,确定该点的距离。
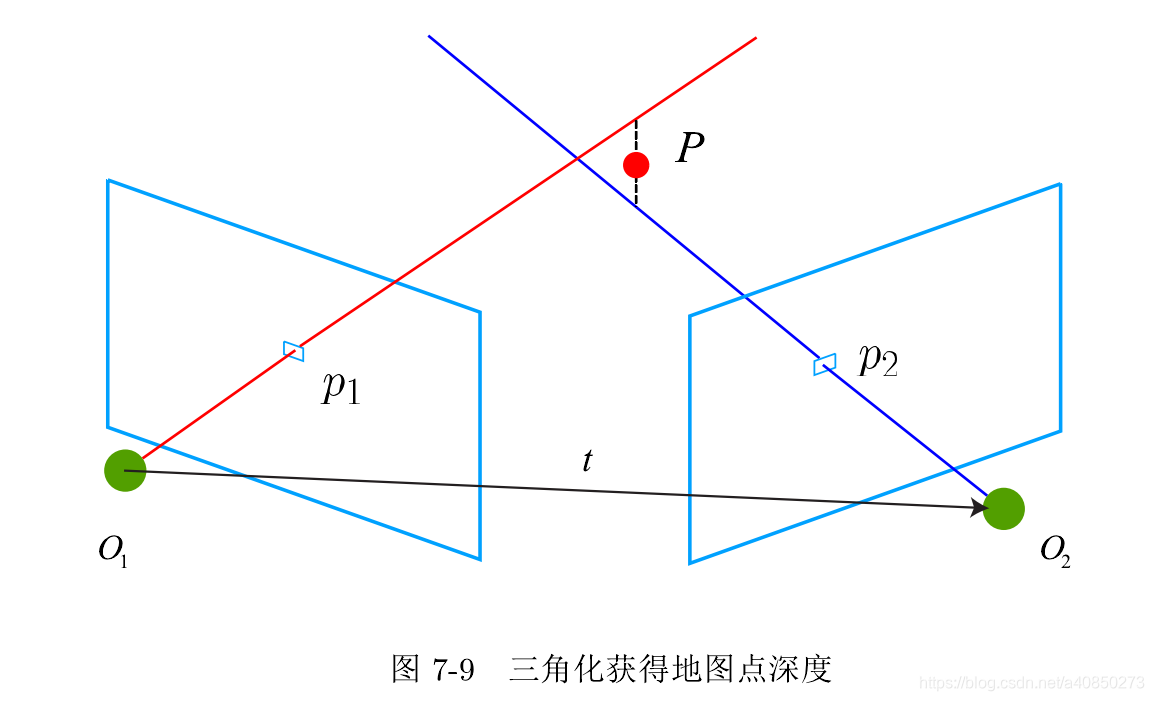
如果
现在需要求解的是两个特征点的深度
当然,由于噪声的存在,更常见的做法是求最小二乘解而不是零解。
讨论

因此,要增加三角化的精度,其一是提高特征点的提取精度,也就是提高图像分辨率——但这会导致图像变大,提高计算成本。另一方式是使平移量增大。但是,平移量增大,会导致图像的外观发生明显的变化,比如箱子原先被挡住的侧面显示出来了,比如反射光发生变化了,等等。外观变化会使得特征提取与匹配变得困难。总而言之,在增大平移,会导致匹配失效;而平移太小,则三角化精度不够——这就是三角化的矛盾。
如果假设特征点服从高斯分布,并且对它不断地进行观测,在信息正确的情况下,我们就能够期望它的方差会不断减小乃至收敛。这就得到了一个滤波器,称为深度滤波器(Depth Filter)。
3D-2D:PnP
前面介绍的2D-2D是需要初始化且需要八个或更多的点来进行相机运动估计。如果能通过双目或者RGB-D获取了一张特征点的3D信息,那么就可以使用更少的点(三个点,需要至少一个额外的点验证结果)不需要初始化直接估计相机运行,这就是3D-2D。具体实现有多重求解方法,下面依次介绍。
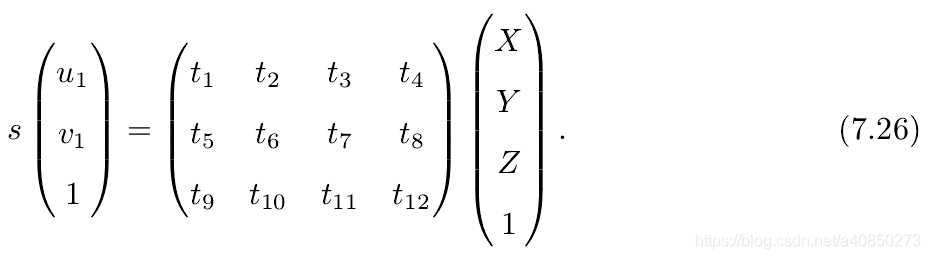
直接线性变换
假定某个空间点
![[R|t]](/image/aHR0cHM6Ly9wcml2YXRlLmNvZGVjb2dzLmNvbS9naWYubGF0ZXg%2FJTVCUiU3Q3QlNUQ%3D)
如果定义如下行向量
可以转换为如下线性方程组
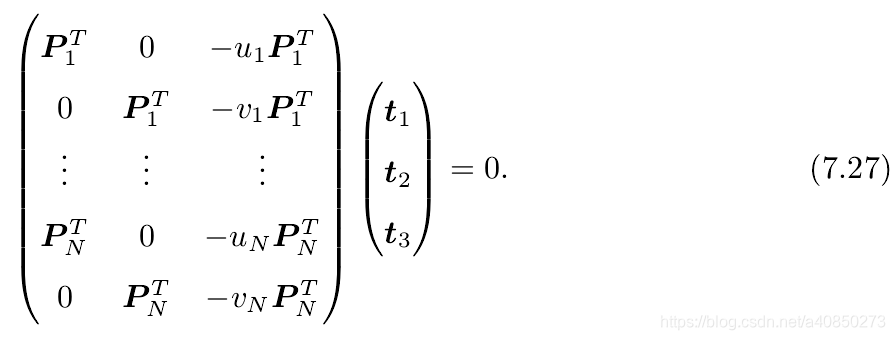
方程组一共有12个自由度,至少需要六对特征点,多于六对同样可以使用 SVD 等方法对超定方程求最小二乘解。
同时,由于求解过程并没有限制旋转矩阵的特性,因此最后的结果需要进行调整:由QR分解把结果从矩阵空间重新投影到SE(3)流形上,转换成旋转和平移两部分。
最后这里默认内参矩阵K是已知的,如果未知,可以在求解中同步求解,不过由于变量的增加,求解的效果也会差一些。
P3P
P3P仅使用三对匹配点,对数据要求较少,有时也会采用。
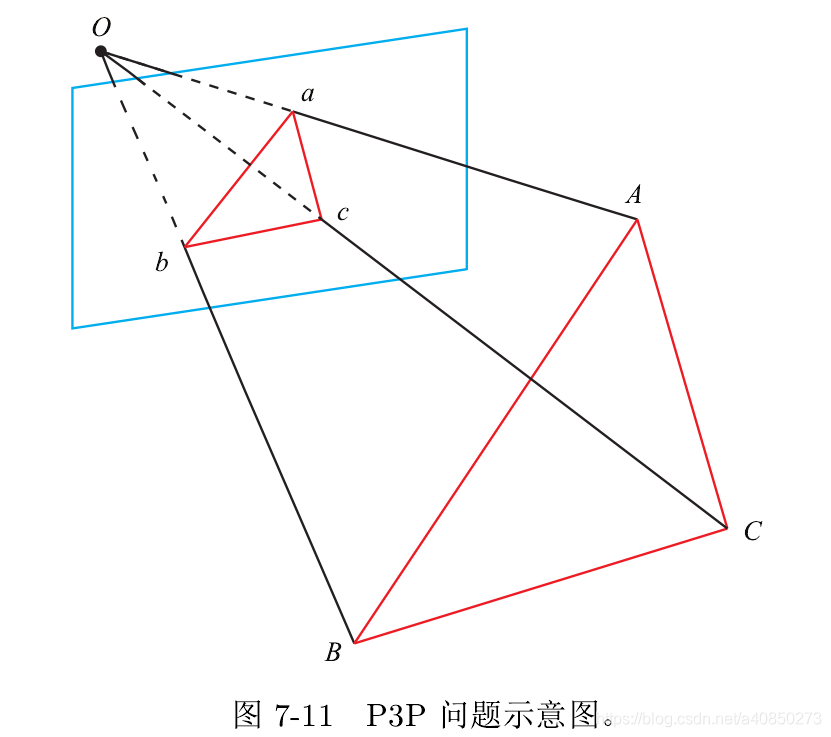
由于已知ABC三点的世界坐标系信息和abc三点二维图像坐标信息,因此可以直接使用上述三角形相似关系得到ABC三点在相机坐标系下的位置。之后这个3D-2D问题就转变为3D-3D问题,后面将会介绍带匹配信息的3D-3D问题求解是相对容易的。
不过P3P也存在以下问题:
- 上述方法只能利用3个匹配点的信息,多于的匹配信息很难利用
- 如果数据中存在噪声,将使算法失效
Bundle Adjustment
在 SLAM当中,通常的做法是先使用 P3P/EPnP 等方法估计相机位姿,然后构建最小二乘优化问题对估计值进行调整。这就是 Bundle Adjustment, 它从非线性的角度解决 PnP 问题。
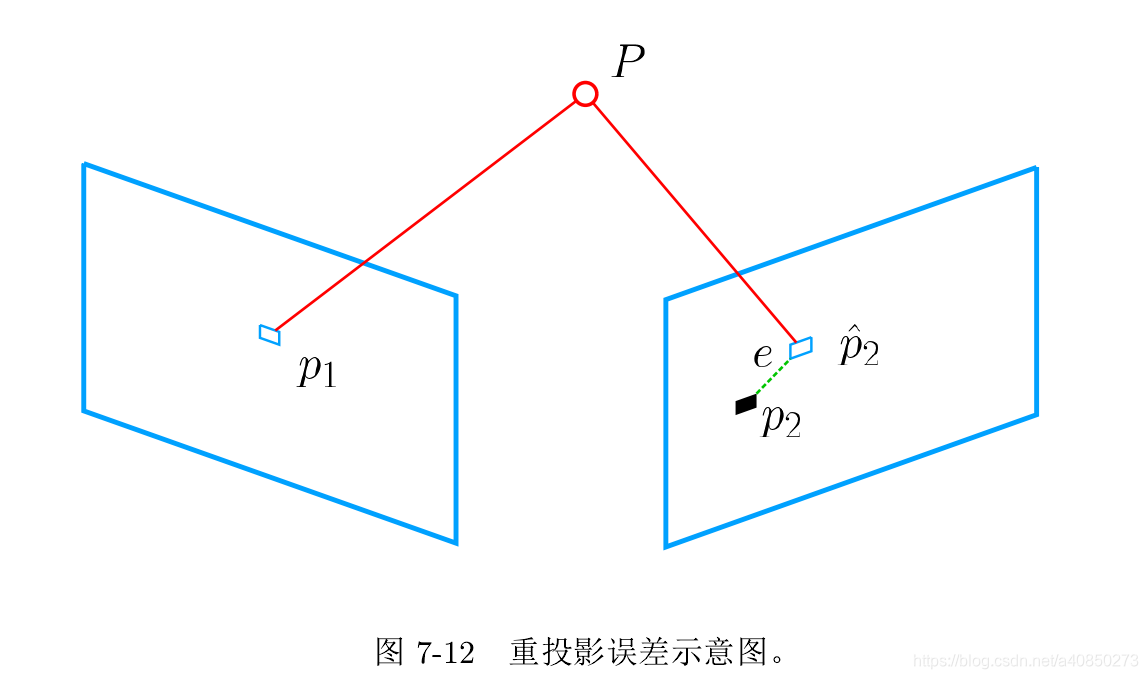
前面介绍的线性方法,往往是先求相机位姿,再求空间点位置,而非线性优化则是把它们都看成优化变量,放在一起优化。在 PnP 问题中,这个 Bundle Adjustment 问题,是一个最小化重投影误差(Reprojection error)的问题。
将相机位姿表示为李代数
不过由于相机位姿未知已经观测点的噪声,因此我们可以把误差求和,构建最小二乘问题,然后寻找最好的相机位姿,使它最小化:
误差基于相机位姿的导数为

误差基于空间点的导数为

3D-3D: ICP
最后我们讨论3D-3D的位姿估计问题,其基于已经匹配好的两组3D点计算相机位姿。其需要得到一个欧氏变换 R,t 使得两组三维点满足
可以看出3D-3D 位姿估计问题中,并没有出现相机模型,也就是说,仅考虑两组 3D 点之间的变换时,和相机并没有关系。因此,在激光 SLAM 中也会碰到 ICP(Iterative Closest Point,迭代最近点),不过由于激光数据特征不够丰富,我们无从知道两个点集之间的匹配关系,只能认为距离最近的两个点为同一个,所以这个方法称为迭代最近点。而在视觉中,特征点为我们提供了较好的匹配关系,所以整个问题就变得更简单了。
ICP 同样存在线性代数解法 SVD,以及利用非线性优化方式求解(类似于 Bundle Adjustment)。
SVD 方法
定义两组点的质心

对应优化函数简化为

分析上式发现左边只和旋转矩阵 R 有关,因此可以先基于左式求得 R,然后通过令第二项为零求得 t。
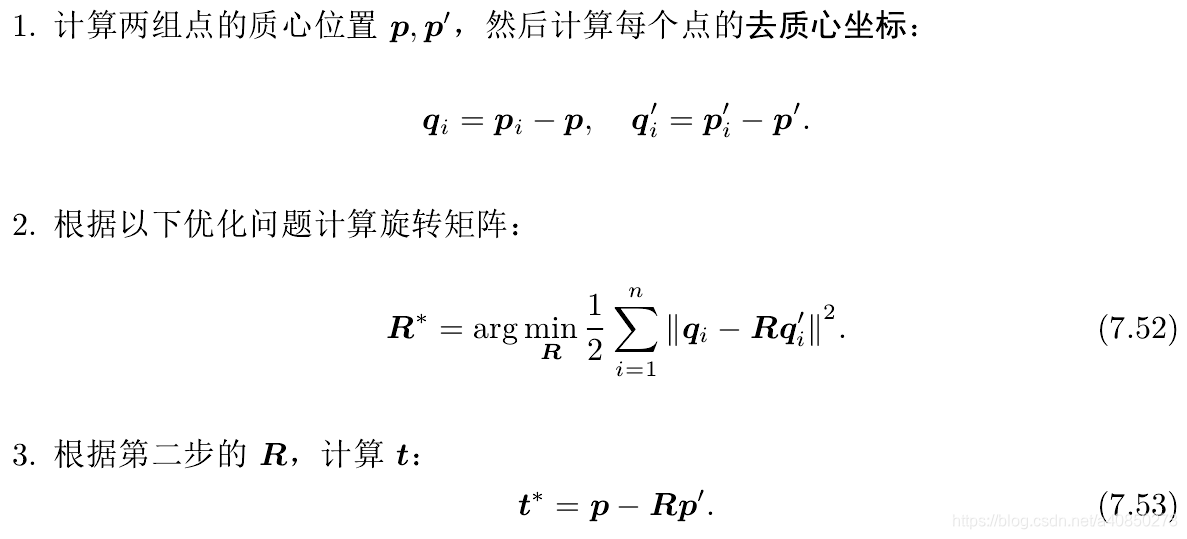
R 矩阵的求解,通过对 W 进行 SVD 分解,而 R 等于

非线性优化方法
通用使用李代数表示位姿,目标函数可以写成

其对应李代数扰动模型为

于是,在非线性优化中只需不断迭代,我们就能找到极小值。而且,可以证明,ICP 问题存在唯一解或无穷多解的情况。在唯一解的情况下,只要我们能找到极小值解,那么这个极小值就是全局最优值——因此不会遇到局部极小而非全局最小的情况。这也意味着
ICP 求解可以任意选定初始值。这是已经匹配点时求解 ICP 的一大好处。
需要说明的是,我们这里讲的 ICP,是指已经由图像特征给定了匹配的情况下,进行位姿估计的问题。在匹配已知的情况下,这个最小二乘问题实际上具有解析解,所以并没有必要进行迭代优化。
不过,在RGB-D SLAM 中,由于一个像素的深度数据可能测量不到,所以我们可以混合着使用 PnP 和 ICP 优化:对于深度已知的特征点,用建模它们的 3D-3D 误差;对于深度未知的特征点,则建模 3D-2D 的重投影误差。于是,可以将所有的误差放在同一个问题中考虑,使得求解更加方便。