系列目录
- 持续更新~
- 欢迎评论区留言指正
- 如果你是Obsidian用户,可以导入自己的笔记库中,效果最佳
- ⚠️如需转载,请标明出处!
第一章 计算机系统概述
1.1 计算机的发展(不考)
计算机系统= 硬件+软件
- 软件
- 软件的分类
- 系统软件——用来管理计算机系统
如:操作系统、数据库管理系统(DBMS) - 应用软件——按任务需要编制成的各种程序
- 系统软件——用来管理计算机系统
- 软件的发展
- 编程语言的发展
- 系统软件的发展
- 软件的分类
ENIAC——世界上第一台电子数字计算机(1946)
通过手动接线来控制计算
- 硬件
- 硬件的发展
- 第一代:电子管时代——高级计算语言:FORTRAN、操作系统雏形
- 第二代:晶体管时代
- 第三代:中小规模集成电路时代——分时操作系统
- 第四代:大规模、超大规模集成电路时代——“微处理器CPU”、微型计算机、PC
- 微处理器的发展
- 机器字长:计算机一次整数运算所能处理的二进制位数——8位、16位、32位、64位
- 8080——8位
- 8086——16位
- …Pentium——64位…
- 硬件发展的历史(1947-1969)
- 摩尔定律
- 硬件的发展
1.2 计算机硬件的基本组成
1.2.1 计算机硬件组成
- 计算机硬件的基本组成
- 五大部分(存储器分为内存储器和外存储器)
- I/O设备(+外存储器=外设)
- 输入设备
- 输出设备
- 主机
- 主存储器(内存储器):存放数据和程序
- CPU
- 运算器:算术运算、逻辑运算
- 控制器:指挥各部件、使程序运行
- I/O设备(+外存储器=外设)
- 五大部分(存储器分为内存储器和外存储器)
EDVAC——世界上第一台冯诺依曼结构的计算机
-
早期冯诺依曼机结构
- 首次提出“存储程序”概念
- 冯·诺伊曼机的特点:
- 以运算器为中心
-
现代计算机结构
- 以存储器为中心
- CPU=运算器+控制器
1.2.2 各个硬件的工作原理🌟
存储体:
MAR(存储地址寄存器,Memory Address Register):
MDR(存储数据寄存器,又称存储通用寄存器,Memory Data Register):
⚠️注意:现在的计算机通常也把MAR、MDR集成在CPU内
- 主存储器的基本组成
- 相关概念
- 存储单元:每个存储单元存放一串二进制代码(每一个地址对应一个存储单元)
- 存储字(word):存储单元中二进制代码的组合
- 存储字长:存储单元中二进制代码的位数
- 存储元:
- 主存储器的组成
- 存储体:数据在存储体内按地址存储
- MAR:MAR位数反应存储单元的个数
- MDR:MDR位数=存储字长
例如:
若MAR=4位->共有2^4个存储单元
若MDR=16位->每个存储单元可存放16bi,(此时)1个字(word)=16bit
- 运算器的基本组成(前三个必须具备)
- ACC(累加计数器):
- MQ(乘商寄存器):
- X(通用寄存器):
- ALU(算术逻辑单元):
- 控制器的基本组成
- CU(控制单元):
IR(指令寄存器):
PC(程序计数器):
- CU(控制单元):
- 工作过程
- 初始:指令、数据存入主存,PC指向第一条指令(此时PC=0)
- 从主存中取指令放入IP、PC自动加1、CU分析指令、CU指挥其他部件执行指令
- 相关概念
1.2.3 计算机系统的层次结构
编译、汇编、解释程序可统称为解释程序
- 计算机系统的层次结构
- 软件
- 虚拟机器 M4(高级语言机器):执行高级语言
- 虚拟机器 M3(汇编语言机器):执行汇编语言
- 虚拟机器 M2(操作系统机器):向上提供广义指令
- 硬件(计组主要讨论)
- 传统机器 M1(用机器语言的机器):执行机器语言指令
- 微程序机器 M0(微指令系统):执行微指令
- 软件
- 三个级别的语言
- 语言
- 高级语言
- 汇编语言
- 机器语言
- 程序
- 编译程序——
- 汇编程序——
- 解释程序——
- 语言
1.3 计算机的性能指标🌟🌟
总容量:存储单元个数x存储字长,单位bit(Byte)
例:MAR为32位,MDR为8位
总容量 = 2 32 × 8 b i t = 4 G B = 2^{32} \times 8 bit = 4GB =232×8bit=4GB
CPU主频——单位为Hz的含义——每秒钟振荡的次数(CPU时钟周期数)——时周数/s
执行一条指令的耗时 =CPI x CPU时钟周期
CPU执行时间(整个程序的耗时) = CPU总时钟周期数/主频 = (指令条数 x CPI)/主频
IPS =主频/平均CPI——指令数/s
其中CPI——时周数/指令,/表示“每”
🌟公式推导的独家方法:将上述的P当成/,也就是分号
IPS=I/S
CPI=C/I
主频=C/S——时钟周期数
- 存储器的性能指标
- 总容量:
- CPU的性能指标
- 相关概念
- CPU主频(时钟频率):CPU内数字脉冲信号振荡的频率,单位:Hz
- CPU时钟周期:(与CPU主频互为倒数,)单位:微秒us、纳秒ns
- CPI(Clock Per Instruction):执行一条指令所需的时钟周期数 ⚠️注:不同的指令CPI不同,相同的指令CPI也不一定相同,一般讨论平均CPI
- IPS(Instructions Per Second):每秒执行多少条指令
- FLOPS(Floating-point Operations Per Second):每秒执行多少次浮点运算,KFLOPS、MFLOPS、GFLOPS、TFLOPS(此处KMGT为计网量纲)
- 相关概念
- 系统整体的性能指标
- 数据通路带宽:数据总线一次所能并行传送信息的位数(各硬件通过数据总线传输数据)
- 吞吐量:指系统在单位时间内处理请求的数量
- 响应时间:通常包括
- CPU时间——运行一个程序花费时间
- 等待时间——磁盘访问、存储器访问、I/O操作、操作系统开销等
- 基准程序(动态测试):也就是常见的“跑分软件”,测量计算机处理速度
第二章 数据的表示和运算
2.1 数据
2.1.1 进位计数制
二进制——B——Binary
十六进制——H——Hexadecimal或者0x,如0x1652
十进制——D——Decimalism
例: (1682)16 = 1682H
⚠️:有的十进制数无法用二进制精确表示,如:0.3
0.3D=0.01001…B
真值->机器数
+15->0 1111
-8->1 1000
- 各种进制
- 罗马数字
- 十进制
- r进制
- 二进制(使用原因)
- 可使用两个稳定状态的物理器件表示
- 0,1正好对应逻辑值真、假,方便实现逻辑运算
- 可很方便地使用逻辑门电路(一种处理二进制的元器件)实现算术运算
- 八进制
- 十六进制
- 二进制(使用原因)
- 🌟其他进制转换成十进制
- 🌟二、八、十六进制之间的相互转换(注意补位)
- 二进制->八进制:3位一组(注意补位)
- 二进制->十六进制:4位一组(注意补位)
- 八进制->二进制:1位对应用3位表示
- 十六进制->二进制:1位对应用4位表示
- 🌟十进制转换成其他进制
- 十进制->r进制
- 整数部分——除基取余法(转换成什么进制——基就取r,也就是除数取r),取数应从下往上(最下面的数是最高位)
- 小数部分——乘基取整法,取数应从上往下(最上面的数为小数部分的最高位)
- 🌟十进制->二进制->r进制
- 拼凑法——先用拼凑法将十进制数转换成二进制再转换成对应的r进制
- 十进制->r进制
- 真值和机器数(有个了解即可)
- 真值:实际的带正负号的数值
- 机器数:把正负号数字化的数(如:0表示+,1表示-)
2.1.2 BCD码(Binary-Coded Decimal)(不考)
- 计算方法:相加所得结果大于等于10,对应二进制就需要加6进行修正(+0110)
- 常见的BCD码
- 8421码
- 余3码(无权码——每一位的权制并不固定)
- 2421码
2.1.3-2.1.4 符号整数的表示和运算
- 无符号整数
- 加法运算——从最低位开始,按位相加,向更高位进位
- 减法运算(补码)——被减数不变,减数全部位按位取反、末位+1,减法变加法
- 带符号整数(整数,又称定点整数)
short型(短整型,2B)、int型(整型,4B)
计算机内部,所有带符号整数的加减法都要先转换成对应的补码- 原码
- 0正1负、机器字长n+1位,表示范围±(2^n-1),真值0有两种形式[±0]原
- 反码
- 正数——原码、反码、补码相同
- 负数
- 原码与反码互相转换:符号位不变,数值位取反,[x]原<->[x]反
- 反码转换成补码:末位+1,[x]反->[x]补
- 补码
- 原码直接转换成补码(相互转换):自右向左找到第一个1,将其左边的所有数值位按位取反
- [B]补与[-B]补相互转换:全部位按位取反、末位+1
- 补码的减法运算——被减数不变,减数全部位按位取反、末位+1,减法变加法(与无符号整数相同,用同一套电路即可处理所有的加减法,省钱)
- 原码
2.1.5 原反码的特性对比
🌟带符号整数的补码,合法表示范围为-2^n ≤ x ≤ 2^n-1,比原码多一个负数
且只有一种方法表示真值0,[0]补=0,000…0000(真值0只有一种补码)
2.1.6 移码
移码:补码的基础上将符号位取反
⚠️:移码只能用于表示整数
四码之间的转换(练习)
2.1.7 定点小数
- 定点数
- 定点整数——带符号整数
- 定点小数
- 定点小数
- 原码:各个bit的位权不同—— 2 − 1 、 2 − 2 . . . 2^{-1}、2^{-2}... 2−1、2−2...
- 原码/反/补码——与定点整数相同
- 加/减运算——先转换为补码(符号位参与运算)——其余与定点整数相同
🌟2.2 运算方法和运算电路
2.2.0 奇偶校验码(大纲已删)
- 校验原理
- 奇偶校验
- 奇校验:整个校验码(有效信息位和校验位)中的1的个数为奇数
- 偶校验:整个校验码中的1的个数为偶数
- 检测不出偶数个位发生错误
- 硬件实现
- ⊕:异或(模2加)
- 0⊕0 = 0
- 0⊕1 = 1
- 1⊕0 = 1
- 1⊕1 = 0
- 偶校验:各信息进行异或(模2加)运算,得到的结果即为偶校验位,如01001101——1⊕0⊕0⊕1⊕1⊕0⊕1=0(偶校验位为0)
- ⊕:异或(模2加)
2.2.1 电路的基本原理、加法器设计
- 算术逻辑单元(ALU)
- 作用、大致原理
- 功能
- 算术运算:四则运算
- 逻辑运算:与、或、非、异或等
- 辅助功能:移位、求补等
- 功能
- 电路基础知识
-
最基本的逻辑运算(表达式——真值表——门电路)
门电路的输入输出信号本质上就是一些高低电平(5V/1V)
非门的门电路图示中有个小圈圈
优先级:与>或- 与——Y=A·B——类比C语言中“&&”——“与门”——天然逻辑“屏蔽“
- 或——Y=A+B——“||”
- 非——Ā——“!”
-
复合逻辑
反演律(德摩根律):
A + B ‾ = A ‾ ⋅ B ‾ A ⋅ B ‾ = A ‾ + B ‾ \overline{A+B}= \overline{A} · \overline{B} \\ \overline{A · B} = \overline{A} + \overline{B} A+B=A⋅BA⋅B=A+B- 与非
- 或非
- 异或⊕
-
- 加法器的实现
- 作用、大致原理
2.2.2 并行进位加法器(佛系一点)
2.2.3 补码加减运算器(新考点)
- 加法器原理
2.2.4 加减运算的补充
2.2.4.1加减运算和溢出判断
- 加减运算
- 原码的加减运算
- 补码的加减运算
- 溢出判断
-
采用一位符号位
-
采用一位符号位,根据数据位进位情况判断溢出——插入LaTex
-
🌟采用双符号位
实际存储时只存储1个符号位,运算时会复制一个符号位(不会增加存储空间)
-

2.2.4.2 标志位的生成(对加法器2.2.3的补充, 新考点)
- 标志位的生成
- OF(Overflow Flag)溢出标志(仅对有符号数加减法有意义)
- SF(Sign Flag)符号标志(仅对有符号数加减法有意义)
- ZF(Zero Flag)零标志
- CF(Carry Flag)进位/借位标志(仅对无符号数加减法有意义)
2.2.5 定点数的移位运算
- 🌟算数移位
- 原码(定点小数同理)——符号位保持不变,仅对数值进行移位
- 右移:高位补0,低位舍弃…相当于÷2,舍弃位≠0——丢失精度
- 左移:低位补0,高位舍弃…相当于x2,舍弃位≠0——严重误差
- 反码(负数反码的移位运算)
- 右移:高位补1,低位舍弃
- 左移:低位补1,高位舍弃
- 🌟补码
规律:负数补码中,最右边的1及其右边同原码;左边同反码- 右移(同反码):高位补1,低位舍弃
- 左移(同原码):低位补0,高位舍弃
- 总结:左移相当于x2;右移相当于÷2——左乘右除
负数补码移位规律——右反高1,左原低0 - 应用举例:-20x7->-20x( 2 0 + 2 1 + 2 2 2^0+2^1+2^2 20+21+22),相当于-20依次加上-20不左移、左移1位、左移2位
- 原码(定点小数同理)——符号位保持不变,仅对数值进行移位
- 逻辑移位(看作“无符号数”的算数移位——高/低补0)
- 逻辑右移:高位补0,低位舍弃
- 逻辑左移:低位补0,高位舍弃
- 应用举例:RGB=R+G+B——Red+Green+Blue——红绿蓝
R=用3B存储无符号数,逻辑左移16位
G=用3B存储无符号数,逻辑左移8位
B=用3B存储无符号数
相加得3B的RGB值
- 循环移位
- 循环左/右移(字面意思)
- 带进位(CF)为的循环左/右移:同理
- 不带进位位…
- 应用举例:汉字“啊”——占2B位置;
大端存储:先存放高字节,再存放低字节
小端存储:先存放低字节,再存放高字节
可以通过循环左移8位,实现大/小端存储的调换
- 循环左/右移(字面意思)
2.2.6 定点数的乘法运算
2.2.6.1 原码的乘法运算
- 乘法运算的实现思想
通过“移位”实现—— × 2 − 5 相当于右移 5 位 , × 2 5 相当于左移 5 位——左乘右除 \times2^{-5}相当于右移5位,\times2^5相当于左移5位——左乘右除 ×2−5相当于右移5位,×25相当于左移5位——左乘右除- 运算器
- ACC——(存储)乘积高位
- MQ——乘数、乘积低位
- X——被乘数(被乘数绝对值的原码)
- 运算器
- (定点数)原码的一位乘法(参与运算的当前位只有1位)
- 符号位单独处理:符号位 X S ⊕ Y S X_S⊕Y_S XS⊕YS
- 数值位:取绝对值进行乘法计算
- 实现方法:先加法再移位(逻辑右移,高位补0),重复n次(数值位为n位)
- 🌟运算过程(进行乘法之前,ACC置0):画运算器图,手动模拟!
当前位=1,(ACC)-(被乘数)->ACC(在ALU中完成),即 ( A C C ) + [ ∣ x ∣ ] 原 (ACC)+[|x|]_原 (ACC)+[∣x∣]原
当前位=0,ACC加上0
每次加法操作后,ACC、MQ统一逻辑右移1位,(ACC)高位补0,执行n次
最后修改符号位—— X S ⊕ Y S = 1 / 0 X_S⊕Y_S=1/0 XS⊕YS=1/0
2.2.6.2 补码的乘法运算
2.2.7 定点数的除法运算
2.2.7.1 原码的除法运算
- 除法运算的实现思想
- 运算器
- ACC(Accumulator)——被除数、余数
- MQ(Multiple-Quotient register)——商
- X——除数
- 运算器
- 🌟原码除法
- 恢复余数法
- 符号位单独处理:符号位 X S ⊕ Y S X_S⊕Y_S XS⊕YS
- 数值位:取绝对值进行除法计算
- 实现方法:上商0/1,得到余数,余数末尾补0
- 🌟运算过程:画运算器图,手动模拟!
默认上商1,如果出错再改上商0,并“恢复余数”(相减结果为负数, 上商0)
求余数:
(ACC)-(除数)->ACC,即
( A C C ) + [ − ∣ y ∣ ] 补 − > A C C (ACC)+[-|y|]_补->ACC (ACC)+[−∣y∣]补−>ACC(,若ACC为负数,则“恢复余数”)
恢复余数:
(ACC)+(除数)->ACC,即
( A C C ) + [ ∣ y ∣ ] 补 − > A C C (ACC)+[|y|]_补->ACC (ACC)+[∣y∣]补−>ACC(,改上商0)
每次减法操作后,ACC、MQ统一逻辑左移1位,(MQ)低位补0,执行n次
==注:==若最后一步商余数为负,还需要再恢复一次余数并商0
若为定点小数的除法运算,则小数点隐含位置应在符号位后
真实余数还需要在ACC中数的基础上在 × 2 − n \times2^{-n} ×2−n
如, 余数 = 0.0111 × 2 − n 余数=0.0111\times2^{-n} 余数=0.0111×2−n
最后修改符号位—— X S ⊕ Y S = 1 / 0 X_S⊕Y_S=1/0 XS⊕YS=1/0
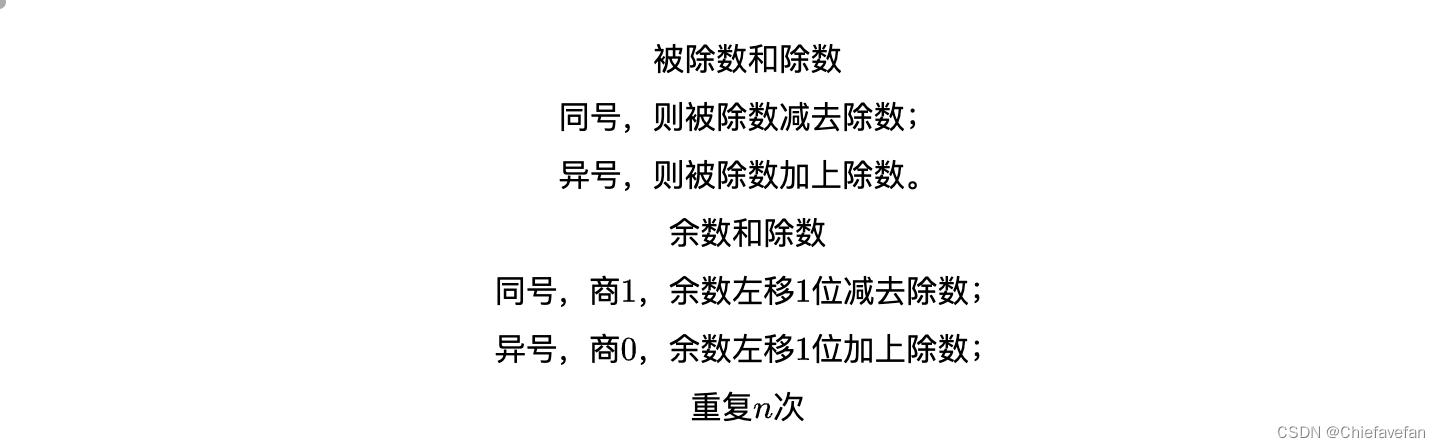
- 加减交替法(不恢复余数法)
- 恢复余数法
2.2.7.2 补码的除法运算
- 🌟补码除法
- (补码)加减交替法(不恢复余数)
- 符号位参与运算(被除/余/除数均采用双符号位,其中01表正,10表负)
- 实现方法:
- (补码)加减交替法(不恢复余数)
2.2.8 C语言类型转换
2.2.9 数据的存储和排列
现代计算机通常是按字节编址,即每个字节对应1个地址——通常也支持按字、按半字、按字节寻址
假设存储字长(机器字长)为32位,则1个字=32bit,半字=16bit。
每次访存只能读/写1个字
- 大小端模式
最高有效字节(MSB)、最低有效字节(LSB)- 大端方式——内存地址从低到高——便于人类阅读——先读入最高有效字节
- 小端方式——便于机器处理——先读入最低有效字节(最应先被处理的字节)
- 边界对齐
- 边界对齐方式——空间换时间
- 边界不对齐方式
🌟2.3 浮点数的表示和运算
2.3.1 浮点数的表示
- 浮点数的作用和基本原理
- 浮点数规格化
- 浮点数的表示范围(大纲已删)
2.3.2 IEEE 754 标准
两个重要的例子:(Goodnotes手算)
- 将==-0.75D==转换成IEEE 754 的单精度浮点数格式(float)表示
- IEEE 754 的单精度浮点数 C0 A0 00 00 H的值(浮点数真值)为多少
2.3. 3 浮点数的(加减)运算
- 🌟(浮点数的)加减运算
- 运算步骤
- (做题时一般要先进行)真值到机器数的转换
- 对阶
- 尾数加减(尾数求和)
- 规格化
- 舍入
- "0"舍"1"入法
- 恒置"1"法
- 截断法(恒舍法)
- 溢出判断
- 阶码上溢——抛出异常(中断)——说明此时发生的是正/负上溢
- 阶码下溢——按机器0处理——超出阶码负数所能表示的最小值
- 运算步骤
- (C语言)强制类型转换(浮点数与定点数之间)
- 无损
- char->int->long->double
- float->double
范围、精度从小到大,转换过程没有损失(默认32位机器)
- 🌟(常考)有损——32位(机器)
- int->float(int向float转换):可能会损失精度
- float->int:可能溢出(float表示范围超出)及损失精度
int:表示整数,范围 − 2 31 ∼ 2 31 − 1 -2^{31} \sim 2^{31}-1 −231∼231−1,有效数字32位(int型变量表示一个定点的整数,1个符号位+31个有效的数值位)
float:表示整数及小数,范围 ± [ 2 − 126 ∼ 2 127 × ( 2 − 2 − 23 ) ] ±[2^{-126}\sim2^{127}\times(2-2^{-23})] ±[2−126∼2127×(2−2−23)],有效数字23+1=24位(float型变量,1个符号位+8个阶码+23个尾数(23位尾数之前实际还有一个隐含的1——实际有效数值应为24位))
- 无损
第三章 存储系统
3.1 存储系统的概念
- 🌟层次结构
- 高速缓存(Cache)——可直接被CPU读写
- 主存储器(主存、内存)——可直接被CPU读写
- 辅助存储器(辅存、外存)
- 分类
- 按层次结构(同上)
- 按存储介质
- 半导体存储器
- 磁表面存储器
- 光存储器
- 🌟按存取方式
- 按地址访问的存储器
- RAM(Random Access Memory)随机存取存储器——如内存
- SAM(Sequential Access Memory)顺序存取存储器——如磁带(Sequential 按顺序的)
- DAM(Direct Access Memory)直接存取存储器——如磁盘
- 按内容访问的存储器
- CAM(Content Access Momory)相联存储器——如快表
- 按地址访问的存储器
- 按信息可更改性
- RWM(Read/Write Memory)读/写存储器——即可读,也可写
- 如:磁盘、内存、Cache
- ROM(Read-Only-Memory)只读存储器
- 如:实体专辑CD-ROM,实体蓝光光碟,BIOS通常写在ROM中——集成在主板上
- RWM(Read/Write Memory)读/写存储器——即可读,也可写
- 按断电后信息是否消失
- 易失性存储器——如主存(内存)、Cache
- 非易失性存储器——如磁盘、光盘
- 按信息读出后,原信息是否被破坏
- 破坏性读出——如DRAM芯片——读出数据后要进行重写
- 非破坏性读出——如SRAM芯片、磁盘、光盘
- 存储器性能指标
- 存储容量=存储字数(MAR位数,如 2 32 2^{32} 232)x存储字长(MDR位数,如8位)
- 单位成本(每位价格)=总成本/总容量
- 🌟数据传输率(主存带宽Bm)=数据的宽度/存储周期
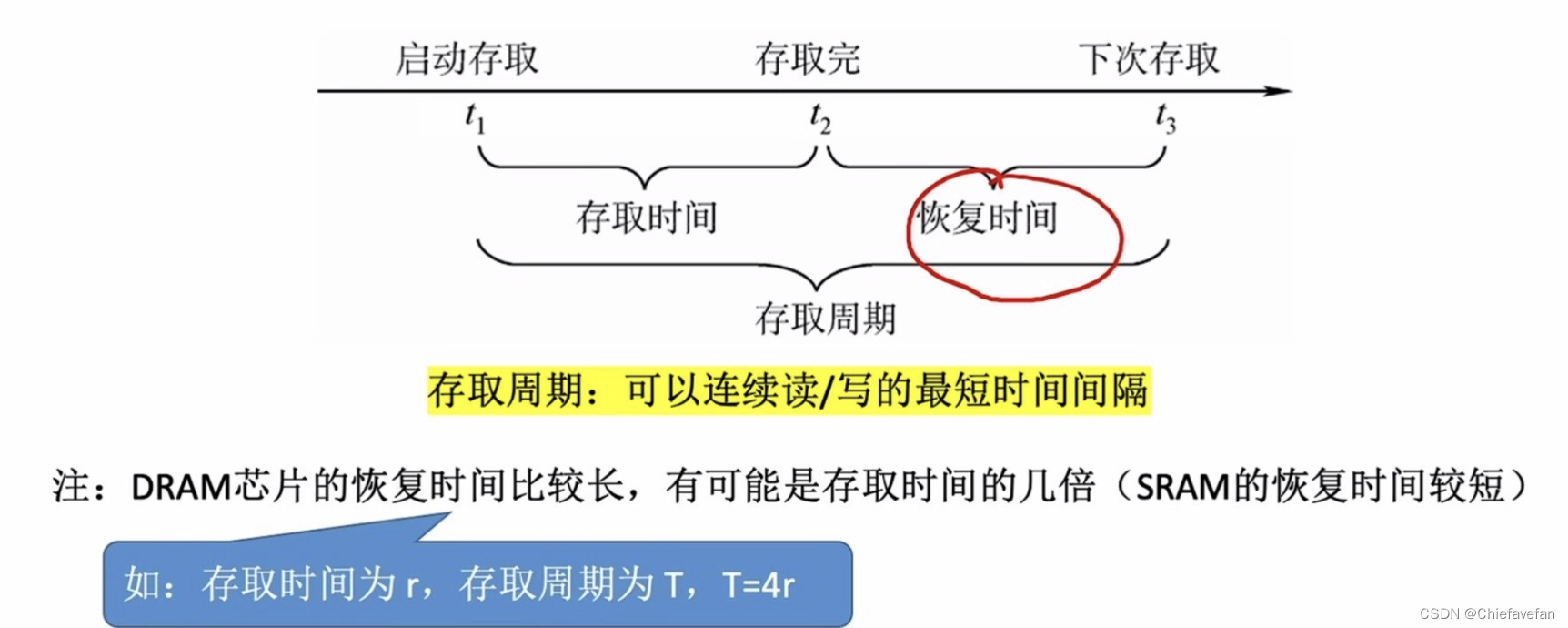
- 🌟存取周期™=存取时间(Ta)+恢复时间
3.2 主存储器
3.2.1 主存储器的基本组成
- 基本元件(DRAM)
- MOS管,一种通电开关——半导体元器件——低电平绝缘体,高电平导体
- (栅极)电容,存储电荷(即存储二进制0/1)——两端电压差(一端接地)——电荷移动
- 存储芯片的结构
- 译码驱动电路
- 译码器将地址信号转化为字选通线的高低电平
- 存储矩阵(存储体)
- 由多个存储单元组成,存储单元又有多个存储元组成
- 读写电路
- 每次读/写一个(存储)字——4B
- 地址线、数据线、片选线(
C
S
‾
/
C
E
‾
\overline {CS}/\overline {CE}
CS/CE)、读写控制线(一根/两根读写线
W
E
‾
低电平写
/
高电平读;
W
E
‾
允许写,
O
E
‾
允许读
\overline {WE}低电平写/高电平读;\overline {WE}允许写,\overline {OE}允许读
WE低电平写/高电平读;WE允许写,OE允许读)
CS——Chip Select(片选信号)、CE——Chip Enable(片使能…)
WE——Write Enable(写使能…)、OE——Output Enable(输出使能…)
注:上划线表示该信号低电平有效
- 译码驱动电路
- 寻址
- 现代计算机通常按字节编址(每个字节),即每个字节对应一个地址
- (也可)按字节寻址、按字寻址、按半字寻址、按双字寻址
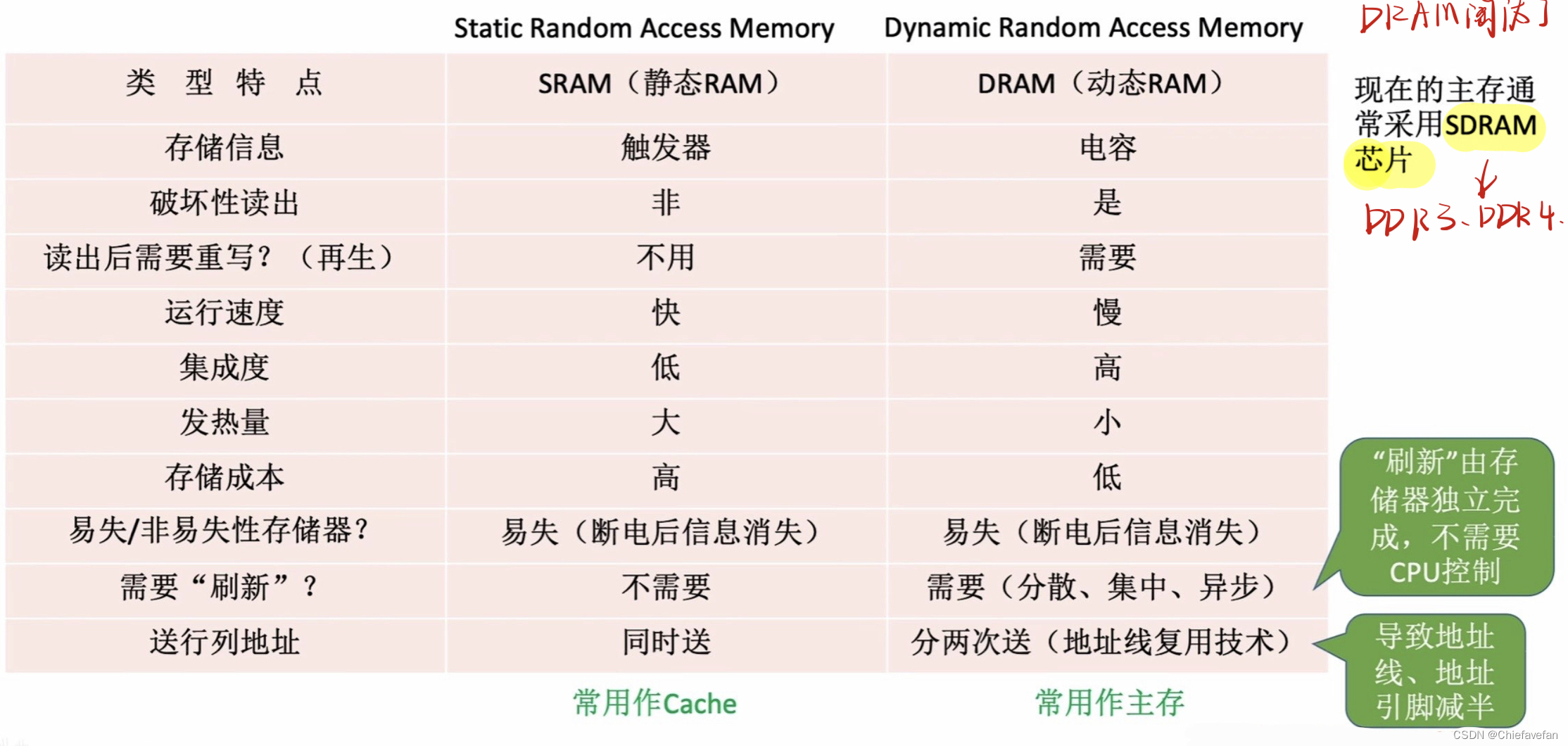
3.2.2 DRAM和SRAM(RAM)
Dynamic Random Access Memory,即动态RAM
Static Random Access Memory,即静态RAM
DRAM用于主存、SRAM用于Cache
🌟高频考点:DRAM、SRAM的区别
- 🌟存储元件不同导致的特性差异(核心区别:存储元不同)
- DRAM——栅极电容(1个MOS管)
- 电容放电后信息被破坏(破坏性读出),读出后应有重写操作,也成“再生”——读写速度更慢
- 一条数据线
- 读出1(电容内存储了电荷):MOS管接通,电容放电,数据线上产生电流
- 读出0(电容内未存储电荷):MOS管接通,数据线上无电流
- SRAM——双稳态触发器(6个MOS管)
- 读出数据,触发器状态保持稳定(非破坏性读出),无需重写——读写速度更快
- 两条数据线
- BL——读出0时,BL为低电平
- BLX——读出1时,BLX为低电平
- DRAM——栅极电容(1个MOS管)
- DRAM的刷新
电荷内的电荷只能维持2ms。即使不断电,2ms后信息也会消失。2ms内必须刷新一次(给电荷充电)- 刷新有关问题——行缓冲
- 刷新周期:一般为2ms
- 行缓冲:以行为单位,每次刷新一行存储单元——行缓冲长度
- 使用行列地址:减少选通线的数量
- 刷新方式:有硬件支持,读出一行的信息后重新写入,占用1个读/写周期(即只占用1个存储周期)
- 何时刷新:假设DRAM内部结构排列128x128的形式,读/写周期(存储周期)0.5us,2ms共4000个周期
- DRAM的刷新分类
![[IMG_336299E90414-1.jpeg]]- 分散刷新——优点:没有“死时间”
- 集中刷新
- ✅异步刷新
- 刷新有关问题——行缓冲
- 🌟🌟DRAM的地址线复用技术——地址线减半(一看到DRAM)
- 行、列地址分两次送(先接收行地址,再接收列地址),可使地址线减半,芯片引脚更少
- 🌟DRAM、SRAM的区别与联系
3.2.3 ROM
RAM芯片——易失性——DRAM用于主存、SRAM用于Cache
ROM芯片——非易失性——磁盘、固态硬盘SSD、辅存
==注:==很多ROM也可以写,也具有“随机存取”的特性——访问速度不受地址影响
- 常见的ROM
- MROM(Mask)——掩模式只读存储器
- PROM(Programmable …)——(一次)可编程只读存储器
- EPROM(Erasable …)——可擦除可编程只读存储器——
根据擦除方式不同- UVEPROM——Ultraviolet rays Erasable …——紫外线擦除
- EEPROM——Electrically Erasable…——点擦除
- 闪存(Flash Memory,闪速存储器)——用于U盘、CD卡
- 注:闪存一般写速度比读速度慢——写入前要擦除
- SSD(Solid State Drives,固态硬盘)
组成部分- 控制单元
- 存储单元(Flash芯片)
3.2.4 双端口RAM(大纲已删)和多模块存储器🌟
存取周期:可以连续读/写的最短时间间隔
存取周期T=存取时间r+恢复时间
提升主存速度
-
双端口RAM(408不考——了解即可)
- 特点:
- 支持两个CPU同时访问RAM
- 可同时读,但不可同时写——对比联系操系“读者-写者”问题
- 发生冲突——“BUSY”信号——另一个CPU的访问端口暂时关闭
- 作用:优化多核CPU访问一根内存条的速度
- 特点:
-
多模块存储器
- 单体多字存储器——🚫指令和数据在主存内必须是连续存放的
- 每次并行读出m个连续的字
- 总线宽度也要拓展为m个字
- 多(m)体并行存储器——既能并行工作,又能交叉工作
给定地址x,确定属于第几个存储体
法一:根据末尾的二进制体号
法二:模块序号=十进制地址x%交叉模块数m-
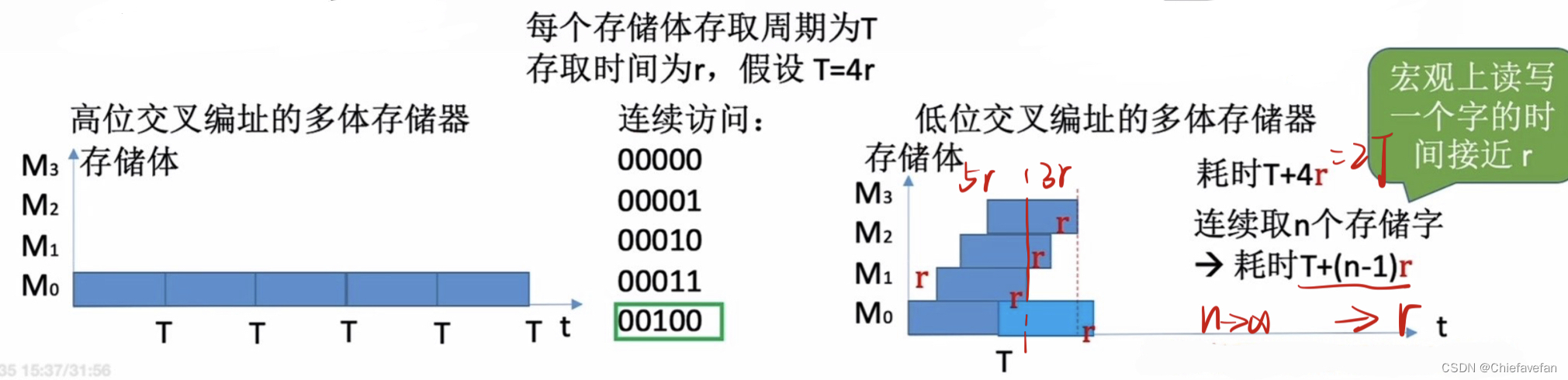
高位交叉编址
不满足局部性原理,无法使用“流水线”方式- 理论上——多个存储体可被并行访问
- 实际上——大多数情况下会连续访问——实际效果相当于单纯的扩容
-
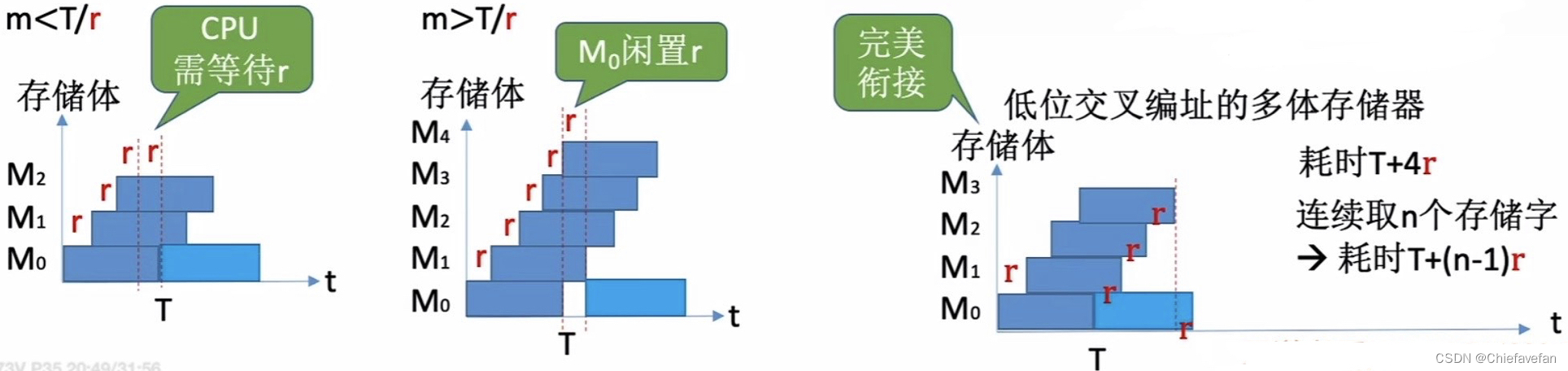
🌟低位交叉编址( m = T r m=\frac {T}{r} m=rT完美)
==其中:==m为存储体的个数(m体交叉存储器),T为存取周期,r为存取时间
408中,默认交叉编织都为低位交叉编织
每个芯片的片选信号由最低位地址确定;高位为片内地址
- 当存储模块数 m ≥ T r m≥\frac {T}{r} m≥rT时,可使流水线(并行存取)不间断
- 每个存储周期内可读写地址连续的m个字
- 低位交叉编织器采用==”流水线“方式并行存取==——宏观上并行,微观上串行——连续访问m个模块
- 宏观上——每个存取周期内所有的模块被并行访问
- 微观上——m个模块被串行连续访问
-
- 单体多字存储器——🚫指令和数据在主存内必须是连续存放的
3.3 主存储器与CPU的连接
-
单块存储芯片与CPU的连接
MAR、MDR一般集成在CPU中- 地址总线(MAR=存储单元的个数 2 x 2^x 2x)
- 数据总线(宽度=存储字长=MDR位数)
- 控制总线——一般仅包括2条
- 读控制线
- 写控制线
- 片选线
-
多块存储芯片与CPU的连接
- 位扩展——增加主存的存储字长/提升CPU的寻址能力
- 字扩展——增加主存的存储字数
- 线选法——电路简单——地址空间不连续
- 以 8 K × 8 位为例, A 14 A 13 只能为 01 或 10 以8K\times8位为例,A_{14}A_{13}只能为01或10 以8K×8位为例,A14A13只能为01或10
- n条线->n个选片信号
- 若直接同时将片信号置为高电平,总线会冲突
- (译码器)片选法——电路复杂——地址空间可连续
- 引入非门:——|> ∘ \circ ∘——
- n条线-> 2 n 2^n 2n个选片信号
- 常见的有:1-2译码器、2-4译码器、3-8译码器
- 地址总线的编号可逆
- 线选法——电路简单——地址空间不连续
- 字位(同时)扩展
- 选择存储器芯片
- 与CPU进行连接
-
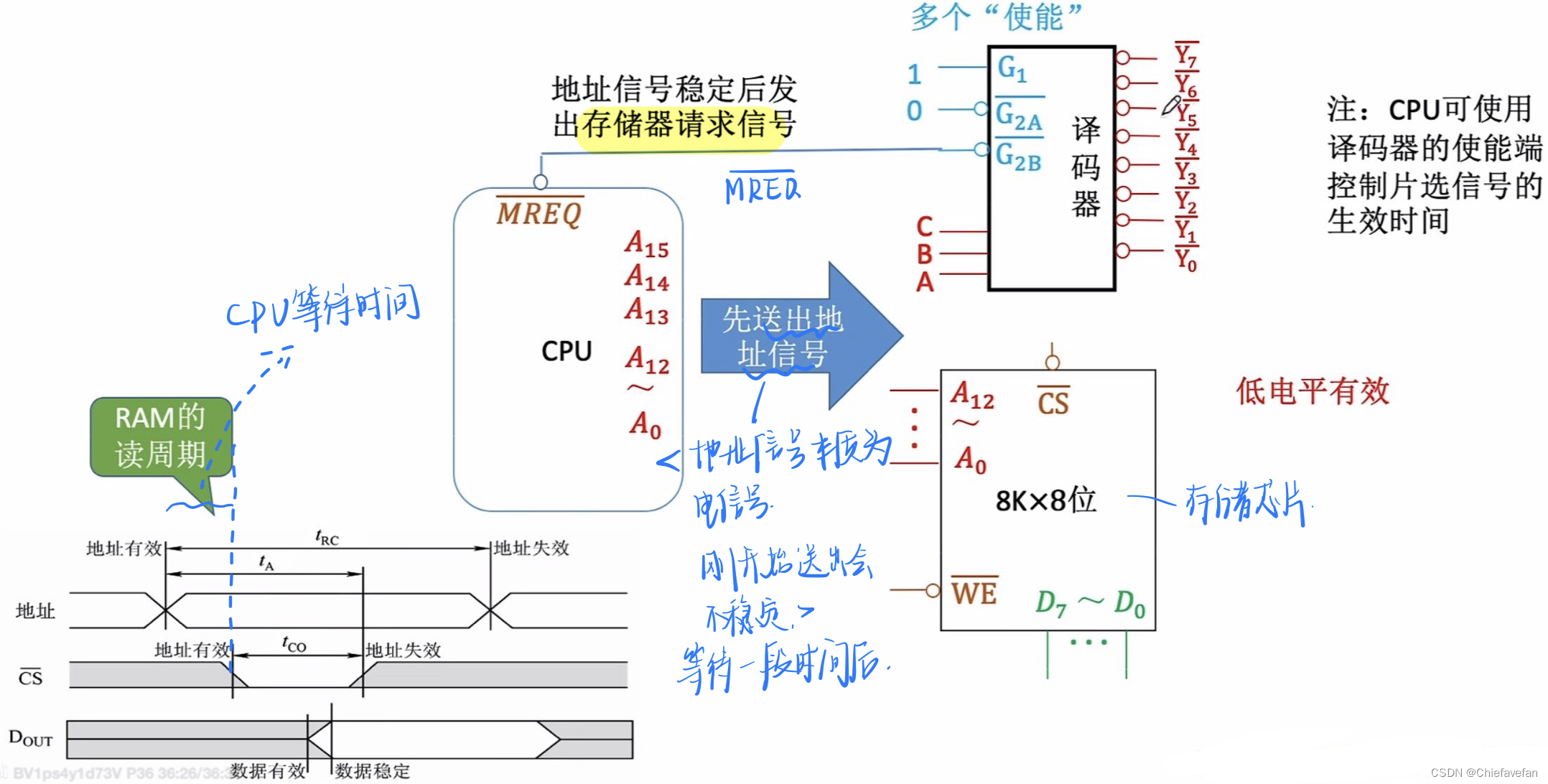
🌟译码器
- EN——Enable——使能信号——类似于CS(片选信号)
- 型号74ls138——多个使能信号—— G 1 , G 2 A ‾ , G 2 B ‾ G_1, \overline {G_{2A}}, \overline {G_{2B}} G1,G2A,G2B——1 0 0B表示运行
- CPU可使用译码器的使能端EN控制片选信号CS的生效时间
- CPU—— M R E Q ‾ \overline {MREQ} MREQ——存储器请求信号
- 使能信号的作用:保证存储芯片接收到的地址信号的稳定
- 地址信号本质为电信号——刚发送时CPU不稳定——需要等待一定时间后——地址信号稳定后发出存储器请求信号 M R E Q ‾ \overline {MREQ} MREQ
3.4 外部存储器
3.4.1 磁盘存储器
- 外存储器——又称辅助存储器——主要部分为磁表面存储器
- 特点
- 可同时作为I/O设备——读/写数据
- 磁表面存储器
- 读写操作均以1bit为单位
- 读写操作是串行的(若主机传输的是并行数据需要转换)
- 特点
- 磁盘原理
- 磁盘设备的组成
- 存储区域:磁头(Heads)、柱面(Cylinders)、扇区(Sectors)
- 磁盘存储器(磁盘驱动器+磁盘控制器)
- 磁盘驱动器
- 核心部件是磁头组件和盘片组件
- 温彻斯特盘是一种可移动头固定盘片的硬盘存储器
- 磁盘控制器
- 硬盘存储器和主机的接口
- 主流标准有IDE(本质ATA)、SCSI、✅SATA(SerialATA,串行ATA)
- ATA——Advanced Technology Attachment——高技术配置
- 磁盘驱动器
- 🌟性能指标
- 磁盘容量:格式化与非格式化—— 非格式化>格式化
- 记录密度
- 道密度:沿半径方向,单位长度上的磁道数
- 位密度:磁道单位长度上能记录的二进制代码位数
- 最外侧扇区与最内侧扇区均记录nbit信息
- 越内侧的磁道位密度越大
- 面密度:位密度X道密度
- 🌟平均存取时间:寻道时间+旋转延迟时间+传输时间(+磁盘控制器延迟时间)
- 寻道时间——磁头移动到目的磁道
- 旋转延迟时间——磁头定位到所在扇区(若题目没有明确表明,则取数学期望E=磁盘转半圈的时间)
- 传输时间——传输数据所花费的时间
- 磁盘控制器延迟时间
- 数据传输率:磁盘存储器在单位时间内向主机传送数据的字节数
- 假设磁盘转数为 r ( 转 / 秒 ) ,每条磁道容量为 N 个字节, 则数据传输速率 ( 理论峰值 ) 为 D r = r N 假设磁盘转数为r(转/秒),每条磁道容量为N个字节,\\则数据传输速率(理论峰值)为D_r=rN 假设磁盘转数为r(转/秒),每条磁道容量为N个字节,则数据传输速率(理论峰值)为Dr=rN
- 🌟磁盘地址:驱动器号|柱面(磁道)号|盘面号|扇区号
- 磁盘设备的组成
- 🌟磁盘阵列RAID
Redundant Array of Inexpensive Disks,廉价冗余磁盘阵列- 思想:利用磁盘廉价的特点提高存储性能、可靠性和安全性
- RAID0:条带化,提高存取速度,没有容错能力
- 逻辑上相邻的两个扇区在物理上存到两个磁盘,类比“低位交叉编址的多体存储器”
- RAID1:镜像磁盘互为备份
- 存两份数据
- RAID2:采用纠错的海明码的磁盘阵列
- 4bit信息位+3bit海明校验位
- 可纠正一位错,发现两位错
- RAID3~5:通过数据校验提高容错能力
3.4.2 固态硬盘(SSD)🌟新考点
- 原理
- 基于闪存技术——Flash Memory,属于电可擦ROM,即EEPROM
- 组成
- 闪存翻译层——负责翻译逻辑块号,找到对应的页(page)
- 存储介质:多个闪存芯片(Flash Chip)——每个芯片包含多个块(block)——每个块包含多个页(page)
- 🌟读写性能特性
区别:磁盘(存储器) 读写以块为单位——对应SSD的一个页- 以页(page)为单位读/写——相当于磁盘的“扇区”
- 以块(block)为单位“擦除”——相当于磁盘的“磁道”
- 擦干净的块,其中每一页都可以写一次,读无数次
- 支持随机访问(访问速度不受地址的影响)
- 系统给定一个逻辑地址,闪存翻译层可通过电路迅速定位到对应的物理地址
- 读快、写慢(先擦除再写)
- 要写的页如果有数据,则不能写入,需要将块内其他页全部复制到一个新的(擦除过的)块中,再写入新的页
- 与机械硬盘相比的特点
- SSD读写速度快,随机访问性能高,用电路控制访问位置;机械硬盘通过移动磁臂旋转磁盘控制访问位置,有寻道时间和旋转延迟
- SSD安静无噪音、耐摔抗震、能耗低、造价更贵
- 🌟SSD的一个块被擦除次数过多(重复写同一个块)可能会坏掉,而机械硬盘的扇区不会因为写的次数太多而坏掉
- 🌟磨损均衡技术
思想:将“擦除”平均分布在各个块上,以提升使用寿命- 动态磨损均衡
- 静态磨损均衡
3.5 高速缓冲存储器Cache🌟🌟🌟
3.5.1 Cache的基本概念和原理
- 工作原理
- 将某些主存块复制到Cache中,缓和CPU与主存之间的速度矛盾
- 局部性原理
- 时间局部性
- 现在访问的地址,不久之后也很可能被再次访问
- 空间局部性
- 现在访问的地址,其附近的地址也很可能即将被访问
- 时间局部性
- 性能分析
- Cache命中率H、缺失率M=1-H
- 两种方式
设 t c 为访问一次 C a c h e 所需时间, t m 为访问一次主存所需时间 设t_c为访问一次Cache所需时间,t_m为访问一次主存所需时间 设tc为访问一次Cache所需时间,tm为访问一次主存所需时间- 先访问Cache,发现未命中再访问主存
- Cache-主存系统的平均访问时间为 t = H t c + ( 1 − H ) ( t c + t m ) t=Ht_c+(1-H)(t_c+t_m) t=Htc+(1−H)(tc+tm)
- 同时访问Cache和主存,若Cache命中则停止访问主存
- Cache-主存系统的平均访问时间为 t = H t c + ( 1 − H ) t m t=Ht_c+(1-H)t_m t=Htc+(1−H)tm
- 先访问Cache,发现未命中再访问主存
- 其他概念
- 主存与Cache之间以“块”为单位进行数据交换
- 主存的“块”又叫“页/页框/页面”;Cache的“块”又叫“行”
- 主存地址可拆分为(主存块号,块内地址)的形式
- 每次被访问的主存块,一定会被立即地调入Cache
3.5.2 Cache和主存的映射方式
区分Cache与主存的数据块的对应关系
- Cache中存储的信息
- 全相联映射——主存块可以放在Cache的任意位置
- 直接映射——主存块只能放在特定的位置:Cache块号=主存块号%Cache总块数
- 组相联映射——主存块存放在特定分组的任意位置:组号=主存块号%Cache分组数
3.5.3 Cache替换算法
解决Cache与主存容量不匹配的问题
- 随机算法(RAND, Random)
- 先进先出算法(FIFO, First In First Out)
- 近期最少使用(LRU, Least Recently Used)
- 最不经常使用(LFU, Least Frequently Used)
3.5.4 Cache写策略(更新策略)
(CPU修改了Cache中的数据副本)确保主存中数据母本的一致性
- 写命中(CPU要写的主存块被命中,已经被调入到Cache中)
- 全写法(写直通法,write-through)
访存次数增加,速度变慢,但更能保证数据一致性- CPU既将数据写入Cache,又要写入主存对应的存储单元中
- Cache块被替换时无需写回
- 写缓冲(write buffer)——减少访存次数(对全写法的优化)
- 组成:由SRAM实现的FIFO队列(先进先出)
- 具体实现:
- 当CPU将某个地址写入Cache且命中,也会同时写入写缓冲中
- 再在专门的控制电路的控制下逐一写回主存(同步到主存中)
- 优缺点:
- CPU写的速度很快,若写操作不频繁,效果很好;
- 写操作很频繁,会因写缓冲饱和(容量有限) 发生阻塞,CPU需要进行阻塞等待
- CPU既将数据写入Cache,又要写入主存对应的存储单元中
- 写回法(write-back)
减少了访存次数,但存在数据不一致的隐患- (CPU只会)向Cache的数据副本中写入相应的数据
- 只有当该Cache块 被替换时,才将整块写回主存
- 未被修改的块 被替换时不写回主存——节省部分写回时间
- 脏位
机器判断该Cache块是否被修改- 1表示被修改,0表示未被修改
- 若该Cache块脏位为1,则根据标记(22位) 写回主存
- 有效位
- 通常搭配脏位一起使用
- (CPU只会)向Cache的数据副本中写入相应的数据
- 全写法(写直通法,write-through)
- 写不命中(…未被命中)
- 写分配法(write-allocate)
- 当CPU对Cache块写不命中,先将要写的地址从主存中调入Cache,再对该Cache块进行写操作
- 主存内容保持不动,CPU只修改(Cache中的)数据副本
- 常搭配写回法
- 非写分配法(not-write-allocate)
- 当CPU对Cache块写不命中,CPU只会对主存进行写操作,而不调入Cache
- 只有读操作未命中时才调入Cache
- 常搭配全写法
- 写分配法(write-allocate)
- 多级Cache
- 多级Cache结构
- ∣ C P U ∣ L 1 C a c h e + W r i t e B u f f e r ( 写缓冲 ) ∣ L 2 C a c h e ∣ D R A M ( 主存 ) ∣ |CPU|L_1\ Cache+Write Buffer(写缓冲)|L_2\ Cache|DRAM(主存)| ∣CPU∣L1 Cache+WriteBuffer(写缓冲)∣L2 Cache∣DRAM(主存)∣
- 离CPU越近速度越快,容量越小
- 各级Cache间常采用“全写法+非写分配法”
- Cache和主存间常采用“写回法+写分配法”
- 多级Cache结构
3.6 虚拟存储系统
两门课这一部分的内容相关性强——对应OS的第三章——虚拟存储器
常作为计组+OS的综合考点
3.6.1 页式存储器
3.6.2 虚拟存储器——计组比较粗略——重点在OS
用户感知到虚拟系统的容量要比它物理上的真实容量要大——OS虚拟性的体现
基于局部性原理
第四章~第七章内容
计算机组成原理 学习笔记II