yolov4在Tesla V100硬件和coco数据集下达到43.5%AP/65FPS的成绩
v4这篇文章更像是很多种trick的一种集成,实验做着做着就变成了SOTA了。在研究v4的文章过程中,最有趣的就是可以看到一个小trick如何被验证有效,然后被修改,最后被集成到算法中。
这篇论文学习了很久,把里面出现的reference尽量地去搞清楚了,所有的pdf都已经下载到本地了,可以公众号回复“20”,打包下载

1、BackBone
为了提升精度,主干网络经常被设计的很深,一方面增强模型的表达力,另一方面增大了感受野,然后随着网络变深,训练难度也会随之增大,所以会在网络中加入一些 skip-connection。YOLOV4的主干网络采用的是CSPDarknet53,这里来简单梳理一下这个bakebone
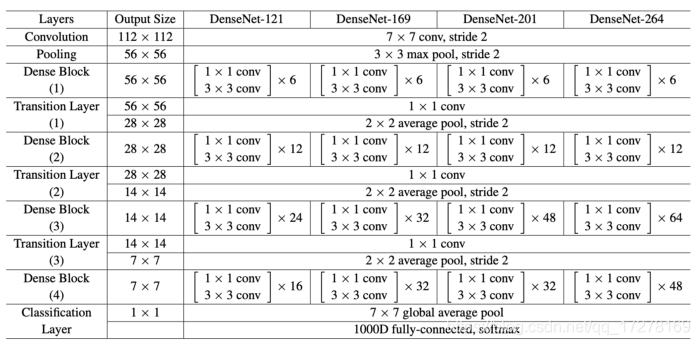
Dense Block
自从resnet将残差概念带入到CNN之后,稠密连接已经被证实对于提升网络表达能力有效果,可以参考 Densely Connected Convolutional Networks。
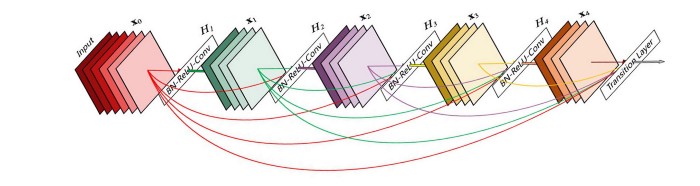
一个Dense Block可以包含多个卷积层,如上图所示的Hi。每一个卷积层(Hi)中包括卷积层,BN层,ReLU等。除了输入层以外,其他的所有Block的输入都来自于前面所有的Block,所以这样特征图的数量就会变大,这个概念就被称为增长率(growth rate)。

在多个Dense Block之间加上卷积和池化之后,就可以组成Dense Net

CSP(Cross-Stage-Partial-connections)
CSPNet将DenseBlock的输入特征图分成了两个部分,如下图所示
CSP在Dense Block上的改进,只允许Part2经过Dense Block的主要目的是降低计算量。具体的理论原理参考原文

CSPDarknet53
这个才是这里的主角,YOLOv4将CSP方法应用到了DarkNet53中,如下图所示
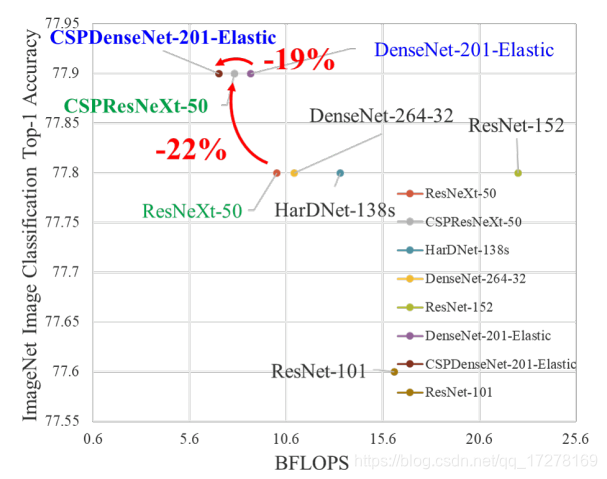
Darknet53来自于YOLOv3,v4文章中说,CSPDarknet53虽然在做classification任务的时候精度不如ResNet系列网络,但是在目标检测任务中会略胜一筹。然后如果在CSPDarknet53上加上一点其他的trick,classification能力也可以超过ResNet。这里后面再说。

2、Neck
在上篇文章中就介绍过Neck这个概念,整个网络架构就是 Input,Backbone,Neck,Prediction。Neck主要是做多尺度特征融合。
信息流在喂给Prediction之前,会在Neck阶段进行element-wise或者concat融合,bottom-up信息流(下采样)包含更多的空间信息,top-down信息流(上采样)会包含更多的语义信息。

FPN(Feature Pyramid Network)
早在YOLOV3中,就已经使用了和FPN类似的在多尺度上进行目标检测的方法
如上图所示,M5经过2倍上采样之后和特征图与C4输出经过1*1卷积之后的特征图进行融合得到M4,M4再经过3*3卷积用来降低上采样带来的伪像(artifacts),最后输出P4

SPP(spatial pyramid pooling layers)
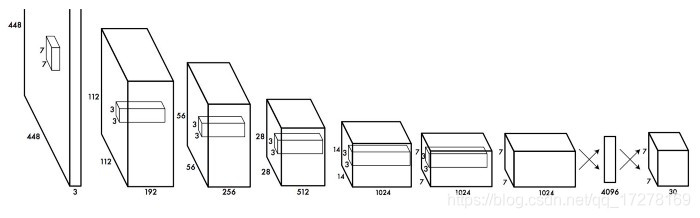
在SPP网络中,最后面的一个池化层被空间金字塔池化(spatial pyramid pooling layer)所代替,特征图在空间上被分为m*m个维度,m分别是1,2,4,然后分别在每一个维度上做最大值池化(max pool),这样最后输出的特征表示就是定长的,然后将定长特征输入给FC层。
传统的CNN模型由于最后有FC层,所以网络输入只能是固定尺寸,但是SPP因为有空间金字塔池化,所以不受这个限制。当然,类似于FCN这样的不包含FC层的网络也是可以任意尺寸输入的,这种设计对于空间信息的提取非常有用,所以FCN一般用于分割领域。

对于YOLO来说,将2D特征图转换为定长的1D向量,这种操作不一定是最优的。
YOLO with SPP
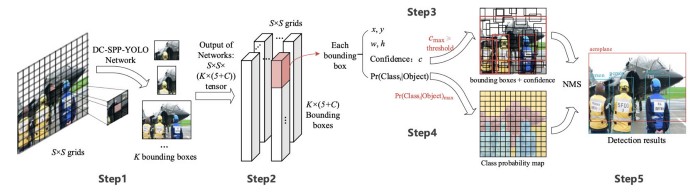
分别使用1*1,5*5,9*9,13*13的最大值池化对输入特征图进行处理,然后将来自不同尺寸的特征图进行concat操作,SPP如何被加到YOLO中,可以参考下图。下图来自于文章《DC-SPP-YOLO: Dense Connection and Spatial Pyramid Pooling Based YOLO for Object Detection》

PAN(Path Aggregation Network)
在传统的串联的CNN模型设计中,浅层网络主要负责提取局部的纹理和图案信息输入给深层网络,从而提取去全局的语义信息。随着网络的加深,局部信息就很可能被丢失。
后来随着深度学习的发展,层与层之间的连接变得复杂,例如DenseNet,每一层都直接与之前的所有层直接相连
例如,FPN,重新设计相邻层的信息流交互
所以随着深度学习的发展,网络结构中层与层之间的信息交互就变成了一个模型设计的关键

如下图所示是PAN网络目标校测框架图
在b部分,增加了自底向上的路径,浅层的局部信息可以容易地传到深层,红色箭头表示FPN的路径,绿色箭头表示PAN路径
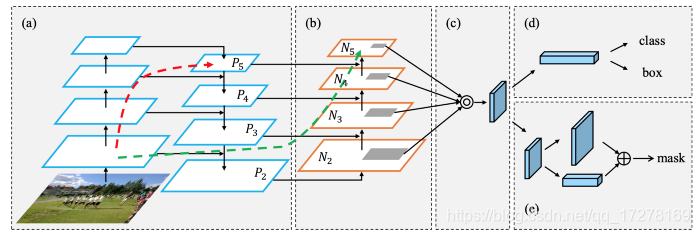
FPN做目标检测的时候,分别是在每一个尺度上进行独立地检测,这样会导致两个问题,第一个是没有利用来自其它层的信息,第二是预测出来的信息会有重复冗余。
PAN使用element-wise max融合了所有层的信息。
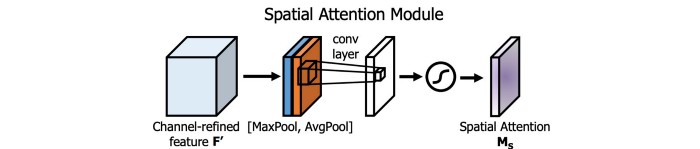
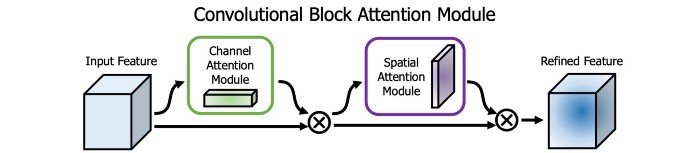
SAM(Spatial Attention Module)
注意力机制在模型设计中用的也挺多的。在SAM中,在一个特征图上分别进行最大值池化和均值池化,这样就可以生成两组特征图,两组特征图经过卷积层,再经过非线性层之后就可以产生空间注意力,如下图所示
在YOLOv4中,修改了SAM,直接使用卷积代替最大值池化和平均池化,进行注意力操作

3、主干网络中的 Bag of Freebies(BoF)
目标检测算法在训练过程中提升性能,常见的无非就是几种套路,数据增强,处理类别平衡,损失函数,软标签等。这些操作只在训练阶段完成,不会对模型的推理速度产生影响,所以v4的作者称之为“Bag of freebies”。
YOLOv4中包含的一些BoF操作有:
- 数据增强,CutMix和Mosaic
- 正则化,Dropblock
- Class label smoothing
CutMix
如下图所示,CutOut是将图像中随机区域进行裁剪,用黑色填充,这样可以使模型在训练的时候不要对特定的特征过多的拟合;CutMix是将一张图片的一部分裁剪到另外一张图上,标签也会随之进行修改,例如将猫的一部分裁剪到狗的图片上,标签可以被标注为0.6 Dog,0.4 Cat。CutMix来自于这篇文章《CutMix: Regularization Strategy to Train Strong Classifiers with Localizable Features》,具体方法可以参考原文。

Mosaic
上面的CutMix只能将两张图片进行融合,这里的Mosaic可以将4个训练图片合并为一个训练图像,这样每一个训练样本都具有更大的多样性,也可以在一定程度上减少对大Batch Size的需求。

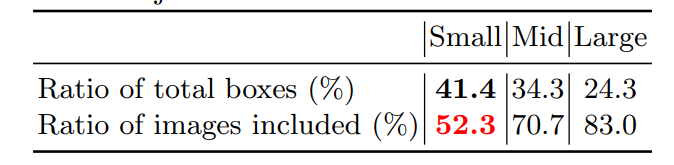
不管是普通训练还是multi-scale training,根据我们的炼丹经验,coco上训练出来的模型,小目标的AP永远是比中目标和大目标低很多,一般都是低了2倍左右。《Stitcher: Feedback-driven Data Provider for Object Detection》这篇文章中的方法貌似有点跟YOLOv4中的mosaic撞车了。在这篇文章中,统计了小目标在数据集中的分布,发现训练集中的小目标数量并不少,如下面表格所示,小目标所占比例41.4%,数量上比其他两种都还要多;但是小目标的分布却是非常不均匀,只有52.3%的训练图片中包含有小目标,而其他两种分布都是相对均匀的。
然后作者又统计了训练过程中小目标的loss分布,超过50%的iteration中小目标所产生的loss都非常低,这也就说明了小目标提供的监督信息是不足的。所以顺着这个思路,直接从源头解决问题,想办法解决小目标分布不均匀的问题,也就是这个数据增强的思路。具体细节可以参考stitcher这篇文章。
DropBlock Regularization
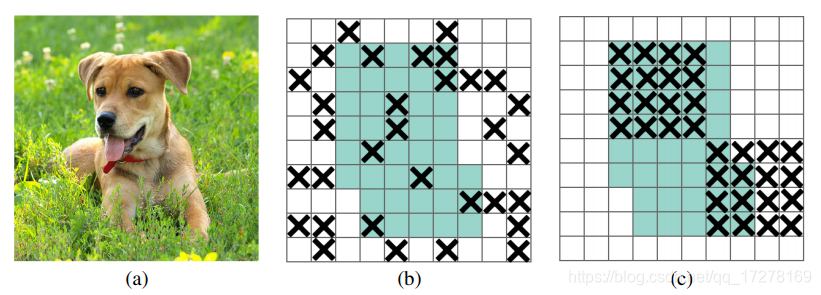
2012年,Hinton提出DropOut,主要是解决网络模型训练过程中过拟合的问题,以一定概率失活一些全连接层的神经元连接,使模型不会太依赖与某些局部特征,提高泛化性。但是这种方法不适用与卷积层,在图像中,相邻位置像素都具有强相关性,如果丢掉一些像素,它的空间信息还是可以被检测到,如下图中间所示。DropBlock就是在卷积层上实现类似功能的正则化
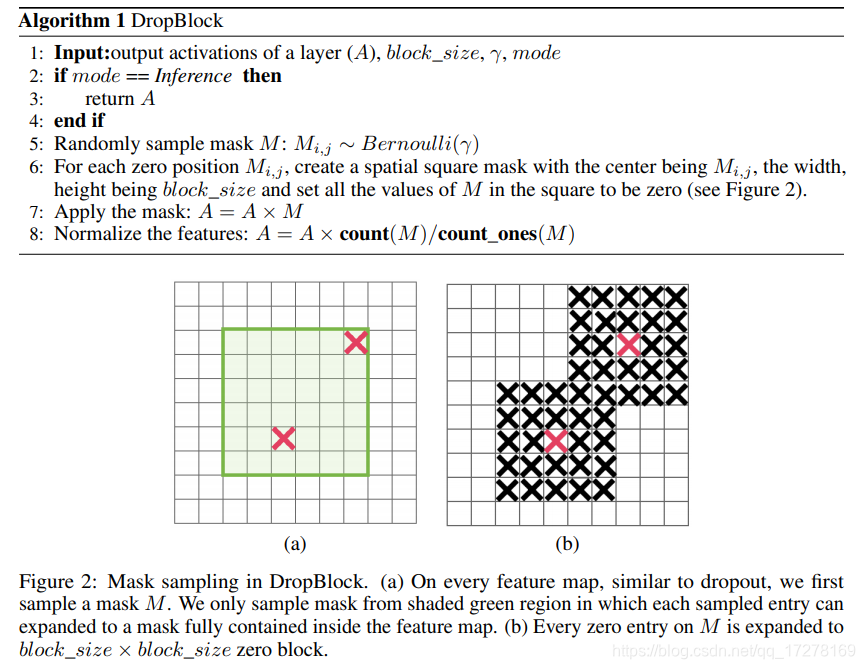
丢掉单独的像素反而不好操作,在文章中实现的直接丢掉block_size*block_size的块。DropBlock和DropOut一样只在训练过程中使用,下图显示的就是DropBlock的伪代码
Class Label Smoothing
在训练深度学习分类模型的时候经常会碰到两个问题,第一个是过拟合(overfitting),第二个是过度自信(overconfidence)。过拟合在上面已经讨论过,通常处理这种问题的套路是提前停止,dropout,正则化等操作;标签平滑(Label Smoothing)就是处理过度自信的一种方法,不过只用于具有softmax的模型训练。在训练过程中,预测值为100%的时候意味着模型是记住了训练样本的数据,而不是从训练数据中学习知识,所以适当的将label平滑之后,有助于分类的学习,提高泛化性。具体可以参考这篇文章 Label Smoothing
4、主干网络中的Bag of specials(BoS)
“Bag of special”就是在提升精度的同时会带来一些推理负担的技巧。常见的有增大感受野、注意力机制、特征融合、NMS等
YOLOv4中包含的BoS技巧有:
- Mish activation
- CSP(Cross-stage partial connections)
- MiWRC(Multi-input weighted residual connections)
Mish activation
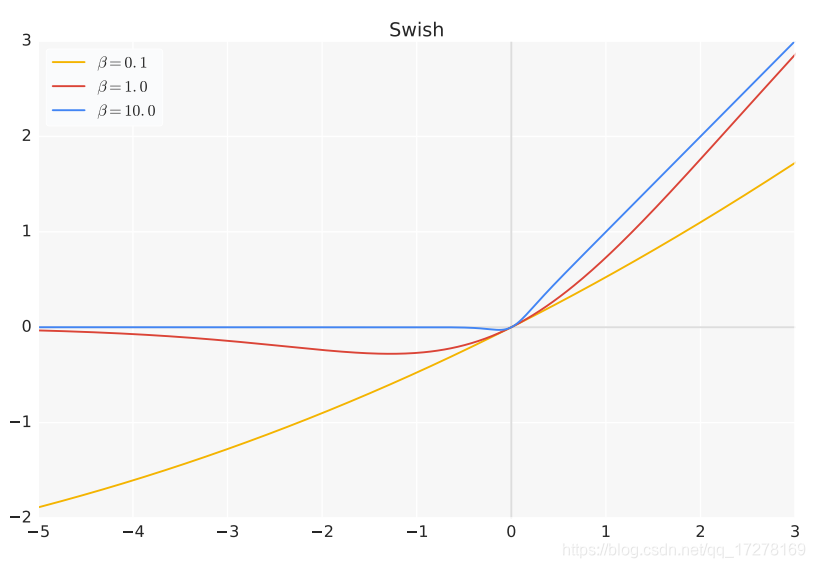
从激活函数的发展历史来看,基本上都是通过实验来确定的,在NAS中也经常看到搜索最适合某个数据集的激活函数,例如谷歌大脑在2017年提出的Swish也是通过实验证明比ReLU系列的表现要好
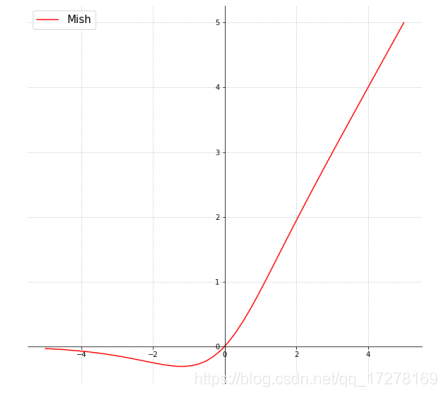
Mish 是一种比较新的激活函数,跟ReLU和Swish有一点相似,但是效果在大多数数据集上都优于后者,函数图像如下图所示
函数表达式如下图
使用Mish之后,YOLOv4的性能提升明显

MiWRC(Multi-input weighted residual connection)
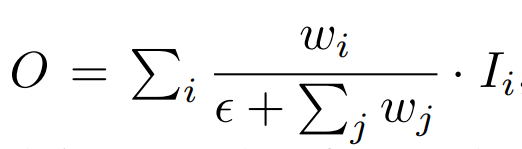
多输入加权残差连接这个方法来自于EfficientDet,也就是EfficientDet中说的带权重特征融合(Weighted Feature Fusion)
Wi是一个可训练参数,具体原理参考EfficientDet
5、检测器中的BoF(Bag of Freebies)
- CIoU-loss
- CmBN
- Self-Adversarial Training
CIoU-loss
谈到目标检测,肯定少不了IoU,也就是交并比,在anchor-based的方法中,不仅可以用来确定正负样本,还可以用来评价预测box和标注box的距离,所以Iou-loss应用在目标检测中比较常见。
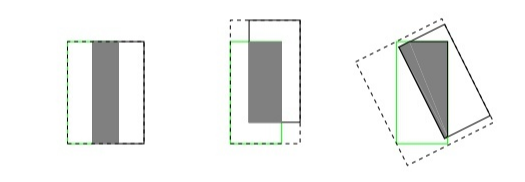
但是IoU作为损失函数会有一个先天性的不足。两个box的IoU相等的时候,会涵盖很多种情况,如下图所示
这三种情况下,其IoU是相等的,但是他们分别在训练的时候回归效果肯定是不一样的,左边回归效果最好,右边最差。当然还有一种情况,当两个box没有重合部分的时候,其IoU都是0,其loss就是一样的,这样显然是不科学的。
后来CVPR2019中提出了GIoU,解决了IoU作为损失函数的痛点,不仅关注重叠区域,还关注其他的非重合区域,再后来DIoU被提出来,将目标与anchor之间的距离,重叠率以及尺度全都都考虑进去了,解决了GIoU训练过程中不容易收敛的问题,DIoU应用到yoloV3上,直接涨点3个。
DIoU引入一个新的目标用来降低两个box的中心距离,关于IoULoss可以参考[知乎这个回答]([https://www.zhihu.com/search?type=content&q=iou%20loss](https://www.zhihu.com/search?type=content&q=iou loss))
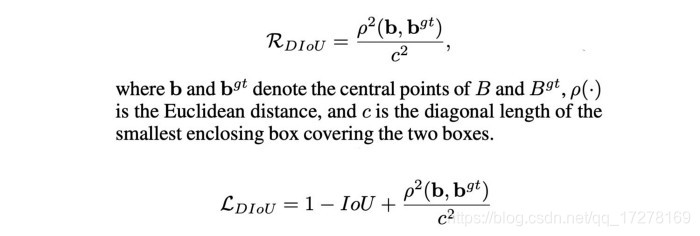
在yoloV4中使用的loss是CIoU,进一步增加预测box和标注box之间的重叠区域,然后最小化他们之间的中心点距离,保持box的长宽比一致

CmBN
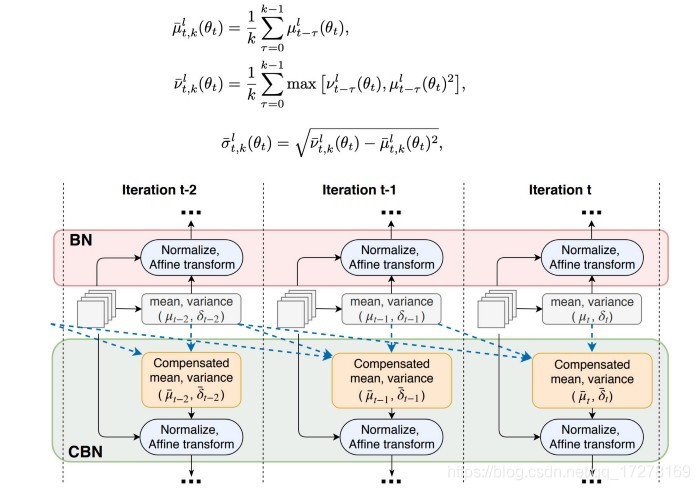
原始的BN操作是针对每一个batch中的数据进行计算均值和方差,但是当batch size设置的很小的时候,预测值中就会存在很多噪声。在CBN方法中,通过迭代一定的次数,然后估算出K次迭代中的统计信息
CmBN在CBN基础上稍微修改了一下下,只在单个batch中的小mini-batch之间手机统计信息
**SAT(Self-Adversarial Training) **
自监督训练其实也是属于一种数据增强的方法。我们传统意义上进行的模型训练,首先训练数据前向传播,然后计算loss,再将loss反传回来,最后更新网络层权重。但是在自监督训练中,流程就不是这样的了,首先训练数据进行前向传,计算loss,然后网络会将输入训练图片进行修改,使得loss变得更大,也就是针对当前模型进行攻击。然后使用新图像再进行训练,这样可以理解为有针对性的数据增强。
遗传算法选择超参数
遗传算法是一种比较经典的算法了,其大致原理就是随着迭代次数增多,每一次迭代都会出最好的一批参数,然后人为地使其“基因突变”,也就是修改超参数,然后再继续迭代,最终选出一组最好的参数。
6、检测器中的Bag of Specials
DIou-NMS
DIoU前面说过,里面包含了两个box之间中心点之间的距离,在最后做NMS的时候,也可以将box之间的中心点距离加入到计算中。实验结果显示对于遮挡情况鲁棒性非常强
7、最后
YOLOv4中集成了非常非常多的技巧,每一个技巧都是通过自己的实验来确定最终是否能够work的,可见作者在object detection方面积累之深,内功之深厚,对还要有钱!没钱买卡,这些实验做到猴年马月都出不了结果
人类的大脑,是想象不出自己没有见过的东西的,而任何所谓的“创新”,都是大脑中已有知识或影像的排列重组