hdl_graph_slam源码解析(三)
3. scan_matching_odometry
Hello,热爱SLAM的小伙伴们,大家好!在经历了惊魂体检、春节土嗨以及爆肝论文后,越来越懒的魏小新继续给大家带来鸽了快半年的源码解析(三),期间也是十分惊讶原来自己写的东西真的有人看有人催更,这更加坚定了我和大家一起分享、解读优秀开源SLAM代码的想法,希望自己可以一直这样永葆热情。废话不多说,let’s do it!
3.3 ndt
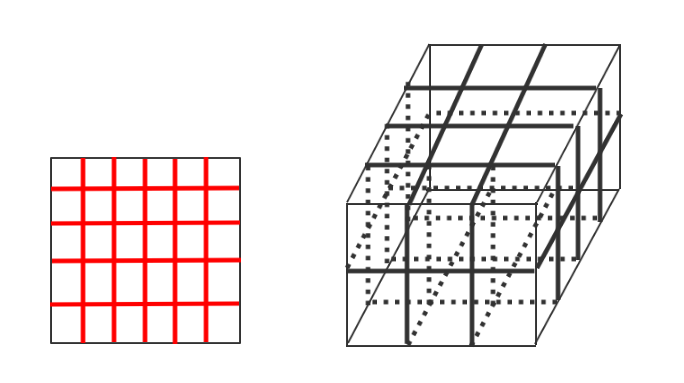
NDT,即是normal distribution transformation的缩写,翻译成中文就是正太分布变换了,哦不对,是正态分布变换!该算法的核心思想是首先将空间离散为方格,若是二维空间,则离散为栅格,若是三维空间则离散划分为立方体,没错就像切豆腐一样。然后这样做有什么好处呢,笔者觉得这样就可以将采样的点云划分到不同的网格中,这样可以很方便的描述点云的局部特性,例如点云局部的形状(直线、平面or球体)、方向(平面法向、直线方向等)。例如现在我们可以利用统计的方法分析每一块豆腐的特性。
所谓正态分布变换,当然是采用正态分布的形式来拟合分析点云的局部特性。至于为什么用正态分布来描述呢?那还不是因为正态分布足够优秀!首先啊,相信大家都对正态分布的公式很熟悉,这种分布呢不仅是一种广泛存在的数据分布形式,同时又具有良好的数学性质,均值和方差(高维情况:均值向量和协方差矩阵),因此总是能在各种SLAM中的建模中看到它。其次,更有趣的是,高维情况下的协方差矩阵还能反映点云的局部特性。假设现在已知有
N
N
N个点落在了一个格子里面,为了简化问题就说是二维情况吧,然后我们可以很容易的求出这
N
N
N个点的均值
μ
\mu
μ和协方差矩阵
Σ
\Sigma
Σ,显然对于二维情况,该协方差矩阵为
2
×
2
2\times2
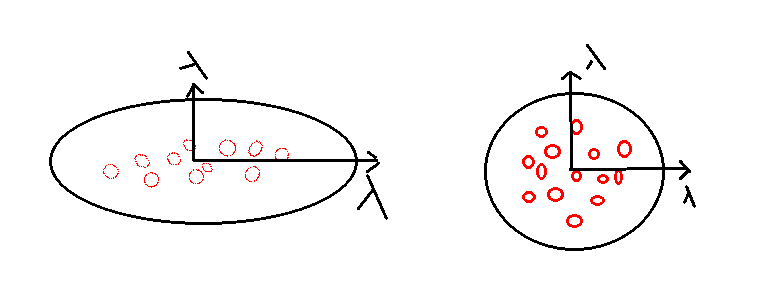
2×2的矩阵。若这几个点在一条直线上,则容易知道该协方差矩阵的秩为1,因此对应的特征值其中一个为0;而当这几个点近似在一条直线上时,则协方差矩阵的一个特征值会明显大于另外一个。当大致均匀分布时,两个特征值会大小类似。因此,正态分布不仅具有良好的数学性质来描述分布,还能够反映点云的局部形态。
既然正态分布可以反映点云的局部形态,自然可以利用正态分布来表示局部点云,这样就可以利用数学公式来表示一组离散的点云。
用公式表示就是:
p
(
x
)
=
1
2
π
∣
Σ
∣
exp
{
−
1
2
(
x
−
μ
)
T
Σ
−
1
(
x
−
μ
)
}
p(x)=\frac{1}{\sqrt{2\pi|\Sigma|}}\exp\{-\frac{1}{2}(x-\mu)^T\Sigma^{-1}(x-\mu)\}
p(x)=2π∣Σ∣1exp{−21(x−μ)TΣ−1(x−μ)}
3.4 ndt matching
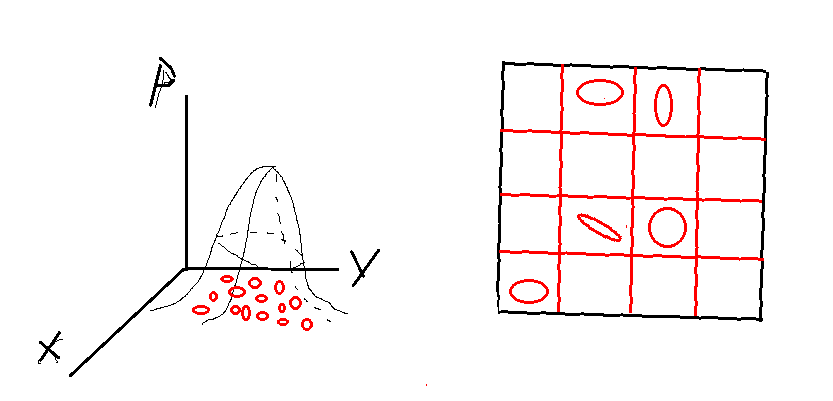
上一节中我们说可以用正态分布来拟合表示点云,这种方法可以很好的描述点云的局部形态。既然本节的主题是scan matching odometry,那么肯定要想怎么把这种表示方法应用到点云配准,进而用到激光里程计中呢?如下图所示,图中左侧是用正态分布拟合给定参考点云(上一时刻的激光扫描)后的示意图,图中红色椭圆是高斯分布对应的协方差椭圆。图中右侧当前时刻的激光扫描(目标点云),怎样利用ndt方法确定两组点云对应的位姿变换矩阵
T
T
T呢?
对于目标点云中的一点,我们可以根据当前假设的位姿变换矩阵
T
T
T计算其在参考点云坐标系内的坐标,并根据该坐标确定其在参考点云中对应的正态分布,则可以根据正态分布的概率计算方法,计算该点满足对应正态分布的概率
p
μ
,
Σ
(
x
)
p_{\mu,\Sigma}(x)
pμ,Σ(x)。则计算完目标点云中所有的点后,可以得到这样一个联合概率:
p
=
∏
i
=
1
N
p
i
(
T
x
)
μ
i
,
Σ
i
p=\prod_{i=1}^{N}p_{i}(Tx)_{\mu_i,\Sigma_i}
p=i=1∏Npi(Tx)μi,Σi
由极大似然估计,可以得到对位姿变换矩阵
T
T
T的估计:
T
∗
=
arg
max
T
p
T^*=\arg \max_T p
T∗=argTmaxp
接下来就可以利用一个常用的技巧,即对高斯分布取一个negative-log,就可以将上式转化为:
T
∗
=
arg
min
T
{
c
o
n
s
t
.
+
∑
i
=
1
N
1
2
(
T
x
−
μ
)
T
Σ
−
1
(
T
x
−
μ
)
}
T^*=\arg \min_T \{const.+\sum_{i=1}^{N}\frac{1}{2}(Tx-\mu)^T\Sigma^{-1}(Tx-\mu)\}
T∗=argTmin{const.+i=1∑N21(Tx−μ)TΣ−1(Tx−μ)}
然后就可以利用一些非线性优化的算法对上式进行求解。好了,NDT matching的基本思路就是这样的了。关于NDT公式的详细推导和改进,建议参考原博士论文:The Three-Dimensional Normal-Distributions Transform — an Efficient Representation for Registration, Surface Analysis, and Loop Detection。事实上,上式的目标函数容易受野值点影响,因此原论文对高斯分布进行了一些改进。话不多说,直接撸源码吧,读源码总是能更好的理解算法,这里我们借鉴pcl对ndt的实现源码。
首先来看下这个类都有哪些成员变量:

TargetGrid target_cells_; //正态分布(均值和协方差矩阵)表示的目标点云
float resolution_; //体素的尺寸
double step_size_; //优化算法中的最大步长
double outlier_ratio_; //点云中野值点的比例
double gauss_d1_,gauss_d2_; //两个正态分布相关的常数
double trans_probability_; //ndt mathcing的概率
//newton-method优化中的梯度以及Hessian阵
Eigen::Vector3d j_ang_a_, j_ang_b_, j_ang_c_, j_ang_d_, j_ang_e_, j_ang_f_, j_ang_g_, j_ang_h_; //梯度
Eigen::Vector3d h_ang_a2_, h_ang_a3_, h_ang_b2_, h_ang_b3_, h_ang_c2_, h_ang_c3_,h_ang_d1_, h_ang_d2_, h_ang_d3_, h_ang_e1_, h_ang_e2_, h_ang_e3_, h_ang_f1_, h_ang_f2_, h_ang_f3_; //塞黑矩阵
Eigen::Matrix<double, 3, 6> point_gradient_; //一阶导数
Eigen::Matrix<double, 18, 6> point_hessian_; //二阶导数
除了以上所示的成员变量,还有来自继承于父类Registration中的成员变量,如最大迭代步数
m
a
x
_
i
t
e
r
a
t
i
o
n
_
max\_iteration\_
max_iteration_以及更新阈值
t
r
a
n
s
f
o
r
m
a
t
i
o
n
_
e
p
s
i
l
o
n
_
transformation\_epsilon\_
transformation_epsilon_等。
接下来我们就要看下计算位姿变换矩阵的函数
c
o
m
p
u
t
e
T
r
a
n
s
f
o
r
m
a
t
i
o
n
(
)
computeTransformation()
computeTransformation():
template<typename PointSource,typename PointTarget> void
pcl::NormalDistributionsTransform<PointSource,PointTarget>::computeTransformation(PointCloudSource &output,const Eigen::Matrix4f &guess){}
这个函数就是pcl中ndt算法中最主要的部分了,即根据输入的source和target点云,计算两组点云的位姿变换矩阵。函数内部首先进行了一些初始化工作,例如
nr_iterations_=0; //初始化迭代次数
converged_=false; //算法收敛标识符
//将预先假设的位姿变换矩阵guess应用到output点云,以便进行近邻搜索
transformPointCloud(output, output, guess);
//将输入的位姿变换矩阵转换为6维的向量 T->(x,y,z,alpha,beta,gamma)
Eigen::Transform<float, 3, Eigen::Affine, Eigen::ColMajor> eig_transformation;
eig_transformation.matrix () = final_transformation_;
Eigen::Matrix<double, 6, 1> p, delta_p, score_gradient;
Eigen::Vector3f init_translation = eig_transformation.translation (); //初始位移
Eigen::Vector3f init_rotation = eig_transformation.rotation ().eulerAngles (0, 1, 2); //初始旋转
p << init_translation (0), init_translation (1), init_translation (2),
init_rotation (0), init_rotation (1), init_rotation (2);
//计算初始时刻的梯度和塞黑矩阵
score = computeDerivatives (score_gradient, hessian, output, p);
接下来就是函数的主部分了,一个大大的循环:
while(!converged_){
previous_transformation_ = transformation_; //保存之前的变换矩阵
//求解newton-method的下降方向,H\delta_p=-g,其中H为塞黑矩阵,g为梯度向量
Eigen::JacobiSVD<Eigen::Matrix<double, 6, 6> > sv (hessian, Eigen::ComputeFullU | Eigen::ComputeFullV);
delta_p = sv.solve (-score_gradient);
//利用线搜索方法求解步长alpha
delta_p.normalize ();
delta_p_norm = computeStepLengthMT (p, delta_p, delta_p_norm, step_size_, transformation_epsilon_ / 2, score, score_gradient, hessian, output);
delta_p *= delta_p_norm;
//更新变换矩阵和向量p
transformation_ = (Eigen::Translation<float, 3> (static_cast<float> (delta_p (0)), static_cast<float> (delta_p (1)), static_cast<float> (delta_p (2))) *
Eigen::AngleAxis<float> (static_cast<float> (delta_p (3)), Eigen::Vector3f::UnitX ()) *
Eigen::AngleAxis<float> (static_cast<float> (delta_p (4)), Eigen::Vector3f::UnitY ()) *
Eigen::AngleAxis<float> (static_cast<float> (delta_p (5)), Eigen::Vector3f::UnitZ ())).matrix ();
p = p + delta_p;
//判断是否收敛或者达到最大迭代步数
if(nr_iterations_ > max_iterations_ ||
(nr_iterations_ && (std::fabs (delta_p_norm) < transformation_epsilon_))){
converged_ = true;
}
nr_iterations_++;
}
整个ndt代码的流程就是这样的,至于怎样根据目标函数计算当前的梯度向量和塞黑矩阵,就不在这里说啦。感兴趣的可以自己取看一下,在pcl中的ndt.hpp源码中都说明的很清楚。ndt的主要问题是其计算效率不高,很难满足实时性要求。用过autoware的同学应该都知道用ndt进行里程计计算时有多慢。
不过好在,已经有大神实现了openmp加速版本的ndt算法,并在github上开源,跑起来速度快的不要不要的,下面就一起来看一下吧。
3.5 ndt-omp
相比如原始的ndt算法,ndt-omp主要对ndt中计算梯度以及hessian矩阵进行了多线程优化。其能进行多线程优化的原因在于ndt的目标函数是由一系列子函数的和构成的,而每一个子函数其实是一个扫描点落在最近cell的概率,因此可以分别计算每一个子函数的梯度和hessian矩阵,最后再进行求和。
F
=
∑
i
=
1
N
p
i
(
T
(
x
i
,
p
)
)
F=\sum_{i=1}^{N}p_i(T(x_i,p))
F=i=1∑Npi(T(xi,p))
∂
F
∂
p
=
∑
i
=
1
N
∂
p
i
∂
p
,
H
=
∂
2
F
∂
p
2
=
∑
i
=
1
N
∂
2
p
i
∂
p
2
\frac{\partial F}{\partial p}=\sum_{i=1}^{N}\frac{\partial p_i}{\partial p}, H=\frac{\partial^2F}{\partial p^2}=\sum_{i=1}^{N}\frac{\partial^2 p_i}{\partial p^2}
∂p∂F=i=1∑N∂p∂pi,H=∂p2∂2F=i=1∑N∂p2∂2pi
其核心代码如下:
template<typename PointSource, typename PointTarget> double
pclomp::NormalDistributionsTransform<PointSource, PointTarget>::computeDerivatives(Eigen::Matrix<double, 6, 1> &score_gradient,
Eigen::Matrix<double, 6, 6> &hessian,
PointCloudSource &trans_cloud,
Eigen::Matrix<double, 6, 1> &p,
bool compute_hessian){
#pragma omp parallel for num_threads(num_threads_) schedule(guided, 8)
for (int idx = 0; idx < input_->points.size(); idx++)
{
int thread_n = omp_get_thread_num();
// Original Point and Transformed Point
PointSource x_pt, x_trans_pt;
// Original Point and Transformed Point (for math)
Eigen::Vector3d x, x_trans;
// Occupied Voxel
TargetGridLeafConstPtr cell;
// Inverse Covariance of Occupied Voxel
Eigen::Matrix3d c_inv;
// Initialize Point Gradient and Hessian
Eigen::Matrix<float, 4, 6> point_gradient_;
Eigen::Matrix<float, 24, 6> point_hessian_;
point_gradient_.setZero();
point_gradient_.block<3, 3>(0, 0).setIdentity();
point_hessian_.setZero();
x_trans_pt = trans_cloud.points[idx];
auto& neighborhood = neighborhoods[thread_n];
auto& distances = distancess[thread_n];
// Find nieghbors (Radius search has been experimentally faster than direct neighbor checking.
switch (search_method) {
case KDTREE:
target_cells_.radiusSearch(x_trans_pt, resolution_, neighborhood, distances);
break;
case DIRECT26:
target_cells_.getNeighborhoodAtPoint(x_trans_pt, neighborhood);
break;
default:
case DIRECT7:
target_cells_.getNeighborhoodAtPoint7(x_trans_pt, neighborhood);
break;
case DIRECT1:
target_cells_.getNeighborhoodAtPoint1(x_trans_pt, neighborhood);
break;
}
double score_pt = 0;
Eigen::Matrix<double, 6, 1> score_gradient_pt = Eigen::Matrix<double, 6, 1>::Zero();
Eigen::Matrix<double, 6, 6> hessian_pt = Eigen::Matrix<double, 6, 6>::Zero();
for (typename std::vector<TargetGridLeafConstPtr>::iterator neighborhood_it = neighborhood.begin(); neighborhood_it != neighborhood.end(); neighborhood_it++)
{
cell = *neighborhood_it;
x_pt = input_->points[idx];
x = Eigen::Vector3d(x_pt.x, x_pt.y, x_pt.z);
x_trans = Eigen::Vector3d(x_trans_pt.x, x_trans_pt.y, x_trans_pt.z);
// Denorm point, x_k' in Equations 6.12 and 6.13 [Magnusson 2009]
x_trans -= cell->getMean();
// Uses precomputed covariance for speed.
c_inv = cell->getInverseCov();
// Compute derivative of transform function w.r.t. transform vector, J_E and H_E in Equations 6.18 and 6.20 [Magnusson 2009]
computePointDerivatives(x, point_gradient_, point_hessian_);
// Update score, gradient and hessian, lines 19-21 in Algorithm 2, according to Equations 6.10, 6.12 and 6.13, respectively [Magnusson 2009]
score_pt += updateDerivatives(score_gradient_pt, hessian_pt, point_gradient_, point_hessian_, x_trans, c_inv, compute_hessian);
}
scores[thread_n] += score_pt;
score_gradients[thread_n].noalias() += score_gradient_pt;
hessians[thread_n].noalias() += hessian_pt;
}
//
for (int i = 0; i < num_threads_; i++) {
score += scores[i];
score_gradient += score_gradients[i];
hessian += hessians[i];
}
}
好了,本节关于ndt和ndt-omp的介绍就到这里了。下一节中,我们将对hdl_graph_slam中的地面检测以及回环检测部分代码进行解析。