前言
开始YOLOv8的模型部署,目的是为大家推荐一个全新的tensorrt仓库https://github.com/shouxieai/infer,大家可以查看我之前的Jetson嵌入式系列模型部署教程,很多细节这里就不再赘述了。考虑到nano的算力,这里采用yolov8n.pt模型,本文主要分享yolov8模型训练和jetson nano部署yolov8两方面的内容。若有问题欢迎各位看官批评指正!!!😄
一、YOLOv8模型训练
先来欣赏下YOLOv8的网络结构😅
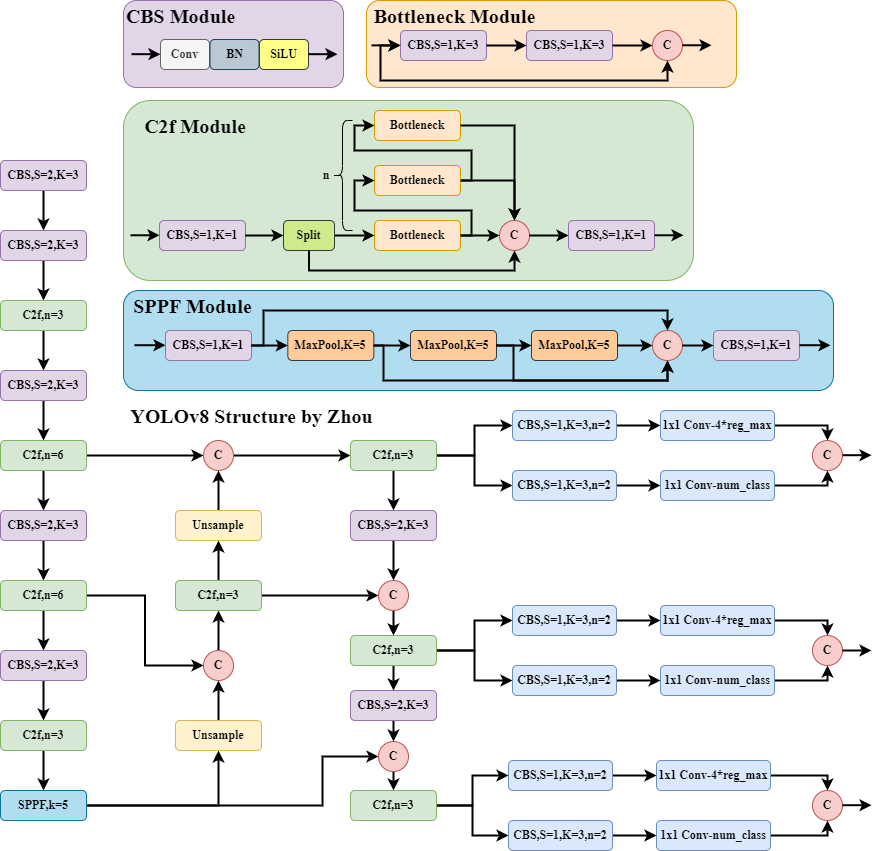
yolov8的代码风格和yolov5相差较大,训练流程也稍有差异。博主主要参考魔鬼面具的YOLOv8最强操作.
1. 项目的克隆和必要的环境依赖
1.1 项目的克隆
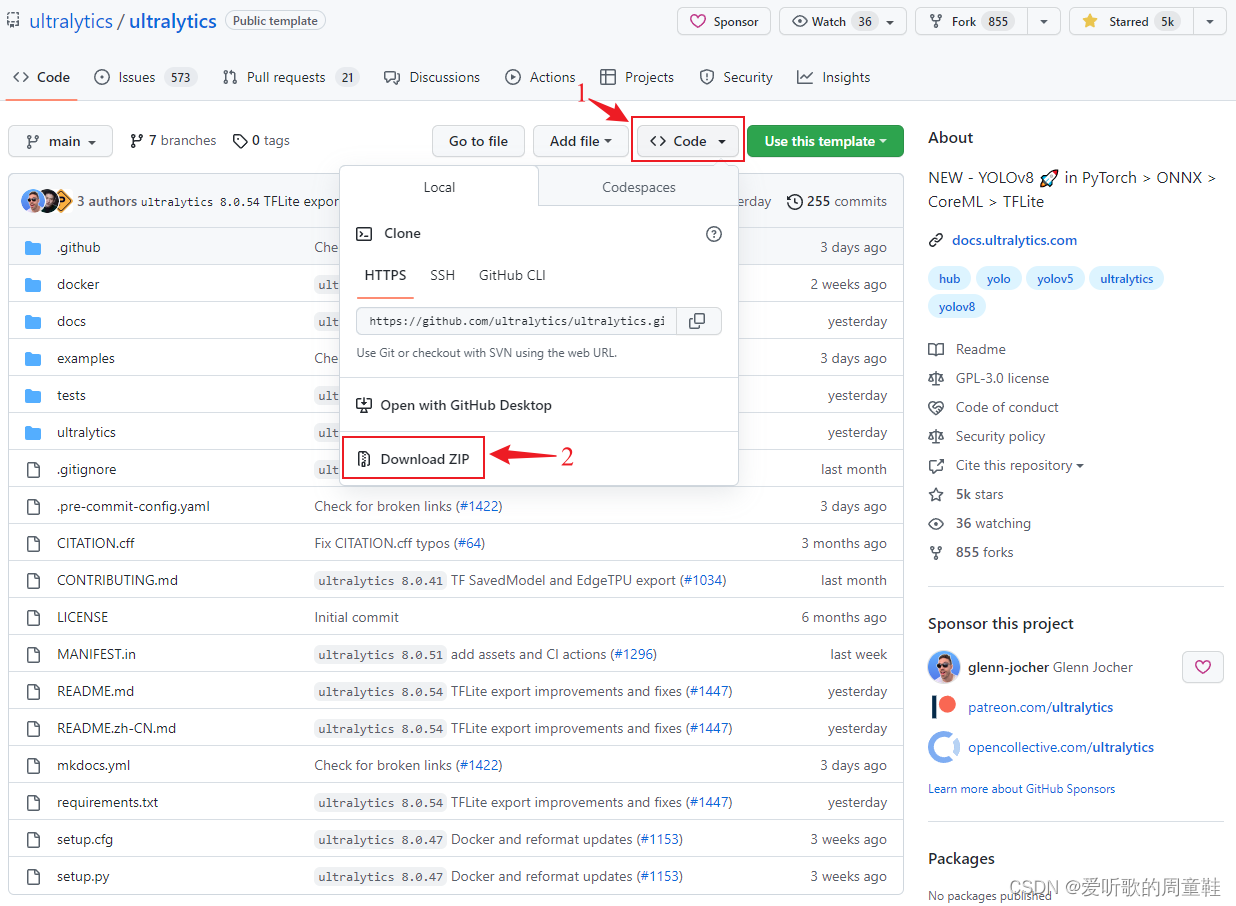
yolov8的代码是开源的可直接从github官网上下载,源码下载地址是https://github.com/ultralytics/ultralytics,由于yolov8刚发布不久一个固定版本都没有,故只能采用主分支进行模型的训练和部署工作(PS:由于代码更新频繁,可能大家会遇到不同的bug)。Linux下代码克隆指令如下
git clone https://github.com/ultralytics/ultralytics.git
也可手动点击下载,点击右上角的Code按键,将代码下载下来。至此整个项目就已经准备好了。也可以点击here[pwd:yolo]下载博主准备好的代码(注意代码下载于2023/3/14日,若有改动请参考最新)
1.2 项目代码结构整体介绍
将下载后的yolov8的代码解压,其代码目录如下图
只需要关注ultralytics这个文件夹的内容即可,下面对这个文件夹的整体目录做一个介绍
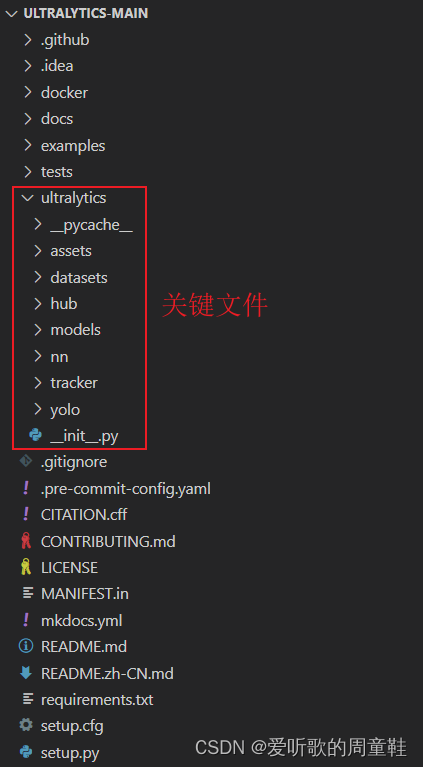
- |-assets:存放测试图片
- |-datasets:存放一些超参数的配置文件以及配置训练集和验证集路径的coco.yaml文件,如果需要修改自己的数据集,那么需要修改其中的yaml文件
- |-hub:pytorch扩展模型
- |-models:存放不同模型的yaml文件,包括v3、v5和v8
- |-nn:存放yolov8整体网络模型搭建的py文件
- |-tracker:存放yolov8目标跟踪的py文件
- |-yolo:存放yolov8模型预测、训练、导出的py文件
- cfg:存放yolov8的配置文件,包括训练时的参数指定如epoch、batch等以及超参数设置,所有的相关配置都可通过这个文件设置(重点关注cfg/default.yaml文件)
- data:存放数据加载的py文件
- engine:存放模型导出的py文件
- utils:存放工具类函数,包括loss、metrics、plots函数等
- v8:存放yolov8分类、检测、分割等不同任务的预测、训练以及验证的py文件(重点关注)
1.3 环境安装
关于深度学习的环境安装可参考炮哥的利用Anaconda安装pytorch和paddle深度学习环境+pycharm安装—免额外安装CUDA和cudnn(适合小白的保姆级教学),这里不再赘述。如果之前配置过yolov5的环境,yolov8可直接使用。
2. 数据集和预训练权重的准备
2.1 数据集
这里采用的数据集是口罩识别,来源于B站UP主HamlinZheng的口罩识别数据集,这里给出下载链接Baidu Drive[password:yolo],博主将原数据集整合了下,方便后续的训练,解压后整个数据集目录结构如下
VOCdevkit
└─VOC2007
├─Annotations
└─JPEGImages
其中JPEGImages中存放的图像文件,Annotations存放的是对应的XML标签文件。关于标签的制作可参考B站UP主霹雳吧啦Wz的PASCAL VOC2012数据集讲解与制作自己的数据集,由于labelimg标注的是VOC格式标签的XML文件,需要转化为YOLO格式标签的txt文件,关于转换的代码可参考炮哥的目标检测—数据集格式转化及训练集和验证集划分,下面给出VOC格式转YOLO格式的代码:
# voc2yolo.py
import xml.etree.ElementTree as ET
import pickle
import os
from os import listdir, getcwd
from os.path import join
import random
from shutil import copyfile
# 1. 修改为自制数据集需检测的类别数
classes = ["have_mask", "no_mask"]
# 2. 训练集和验证集的比例
TRAIN_RATIO = 80
def clear_hidden_files(path):
dir_list = os.listdir(path)
for i in dir_list:
abspath = os.path.join(os.path.abspath(path), i)
if os.path.isfile(abspath):
if i.startswith("._"):
os.remove(abspath)
else:
clear_hidden_files(abspath)
def convert(size, box):
dw = 1. / size[0]
dh = 1. / size[1]
x = (box[0] + box[1]) / 2.0
y = (box[2] + box[3]) / 2.0
w = box[1] - box[0]
h = box[3] - box[2]
x = x * dw
w = w * dw
y = y * dh
h = h * dh
return (x, y, w, h)
def convert_annotation(image_id):
in_file = open('VOCdevkit/VOC2007/Annotations/%s.xml' % image_id)
out_file = open('VOCdevkit/VOC2007/YOLOLabels/%s.txt' % image_id, 'w')
tree = ET.parse(in_file)
root = tree.getroot()
size = root.find('size')
w = int(size.find('width').text)
h = int(size.find('height').text)
for obj in root.iter('object'):
difficult = obj.find('difficult').text
cls = obj.find('name').text
if cls not in classes or int(difficult) == 1:
continue
cls_id = classes.index(cls)
xmlbox = obj.find('bndbox')
b = (float(xmlbox.find('xmin').text), float(xmlbox.find('xmax').text), float(xmlbox.find('ymin').text),
float(xmlbox.find('ymax').text))
bb = convert((w, h), b)
out_file.write(str(cls_id) + " " + " ".join([str(a) for a in bb]) + '\n')
in_file.close()
out_file.close()
wd = os.getcwd()
wd = os.getcwd()
data_base_dir = os.path.join(wd, "VOCdevkit/")
if not os.path.isdir(data_base_dir):
os.mkdir(data_base_dir)
work_sapce_dir = os.path.join(data_base_dir, "VOC2007/")
if not os.path.isdir(work_sapce_dir):
os.mkdir(work_sapce_dir)
annotation_dir = os.path.join(work_sapce_dir, "Annotations/")
if not os.path.isdir(annotation_dir):
os.mkdir(annotation_dir)
clear_hidden_files(annotation_dir)
image_dir = os.path.join(work_sapce_dir, "JPEGImages/")
if not os.path.isdir(image_dir):
os.mkdir(image_dir)
clear_hidden_files(image_dir)
yolo_labels_dir = os.path.join(work_sapce_dir, "YOLOLabels/")
if not os.path.isdir(yolo_labels_dir):
os.mkdir(yolo_labels_dir)
clear_hidden_files(yolo_labels_dir)
yolov5_images_dir = os.path.join(data_base_dir, "images/")
if not os.path.isdir(yolov5_images_dir):
os.mkdir(yolov5_images_dir)
clear_hidden_files(yolov5_images_dir)
yolov5_labels_dir = os.path.join(data_base_dir, "labels/")
if not os.path.isdir(yolov5_labels_dir):
os.mkdir(yolov5_labels_dir)
clear_hidden_files(yolov5_labels_dir)
yolov5_images_train_dir = os.path.join(yolov5_images_dir, "train/")
if not os.path.isdir(yolov5_images_train_dir):
os.mkdir(yolov5_images_train_dir)
clear_hidden_files(yolov5_images_train_dir)
yolov5_images_test_dir = os.path.join(yolov5_images_dir, "val/")
if not os.path.isdir(yolov5_images_test_dir):
os.mkdir(yolov5_images_test_dir)
clear_hidden_files(yolov5_images_test_dir)
yolov5_labels_train_dir = os.path.join(yolov5_labels_dir, "train/")
if not os.path.isdir(yolov5_labels_train_dir):
os.mkdir(yolov5_labels_train_dir)
clear_hidden_files(yolov5_labels_train_dir)
yolov5_labels_test_dir = os.path.join(yolov5_labels_dir, "val/")
if not os.path.isdir(yolov5_labels_test_dir):
os.mkdir(yolov5_labels_test_dir)
clear_hidden_files(yolov5_labels_test_dir)
train_file = open(os.path.join(wd, "yolov5_train.txt"), 'w')
test_file = open(os.path.join(wd, "yolov5_val.txt"), 'w')
train_file.close()
test_file.close()
train_file = open(os.path.join(wd, "yolov5_train.txt"), 'a')
test_file = open(os.path.join(wd, "yolov5_val.txt"), 'a')
list_imgs = os.listdir(image_dir) # list image files
prob = random.randint(1, 100)
print("Probability: %d" % prob)
for i in range(0, len(list_imgs)):
path = os.path.join(image_dir, list_imgs[i])
if os.path.isfile(path):
image_path = image_dir + list_imgs[i]
voc_path = list_imgs[i]
(nameWithoutExtention, extention) = os.path.splitext(os.path.basename(image_path))
(voc_nameWithoutExtention, voc_extention) = os.path.splitext(os.path.basename(voc_path))
annotation_name = nameWithoutExtention + '.xml'
annotation_path = os.path.join(annotation_dir, annotation_name)
label_name = nameWithoutExtention + '.txt'
label_path = os.path.join(yolo_labels_dir, label_name)
prob = random.randint(1, 100)
print("Probability: %d" % prob)
if (prob < TRAIN_RATIO): # train dataset
if os.path.exists(annotation_path):
train_file.write(image_path + '\n')
convert_annotation(nameWithoutExtention) # convert label
copyfile(image_path, yolov5_images_train_dir + voc_path)
copyfile(label_path, yolov5_labels_train_dir + label_name)
else: # test dataset
if os.path.exists(annotation_path):
test_file.write(image_path + '\n')
convert_annotation(nameWithoutExtention) # convert label
copyfile(image_path, yolov5_images_test_dir + voc_path)
copyfile(label_path, yolov5_labels_test_dir + label_name)
train_file.close()
test_file.close()
代码总共需要修改两处
- 第11行,修改要检测的类别名称
- 第14行,修改训练集和验证集的划分比例
整个目录结构如下,注意voc2yolo.py与VOCdevkit处于同一级目录
VOCdevkit
└─VOC2007
├─Annotations
└─JPEGImages
voc2yolo.py
注:目录结构一定要与博主的一致,因为程序已经将对应目录写死。
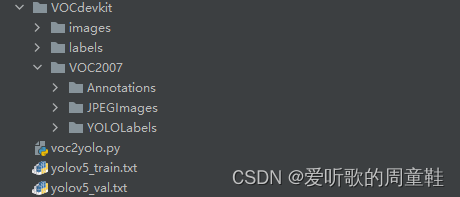
运行voc2yolo.py代码之后得到如下结果
可以看到目录下有一些新的文件生成,首先VOCdevkit文件夹下分别生成了images和labels文件夹,分别存放着图像和对应的yolo格式的标签文件,每个文件夹下分别包含train和val两个子文件夹,代表各自对应的训练集和验证集。VOC2007文件夹下生成了YOLOLabels文件夹,存放着对应yolo格式的标签文件。然后还生成了yolov5_train.txt以及yolov5_val.txt两个txt文件,存放着训练集和验证集图片的完整路径。yolov8的训练只需要VOCdevkit目录下的images和labels两个文件夹,其它均不需要,故最终的目录结构如下
VOCdevkit
├─images
│ ├─train
│ └─val
└─labels
├─train
└─val
至此,数据集的准备工作完毕。
2.2 预训练权重准备
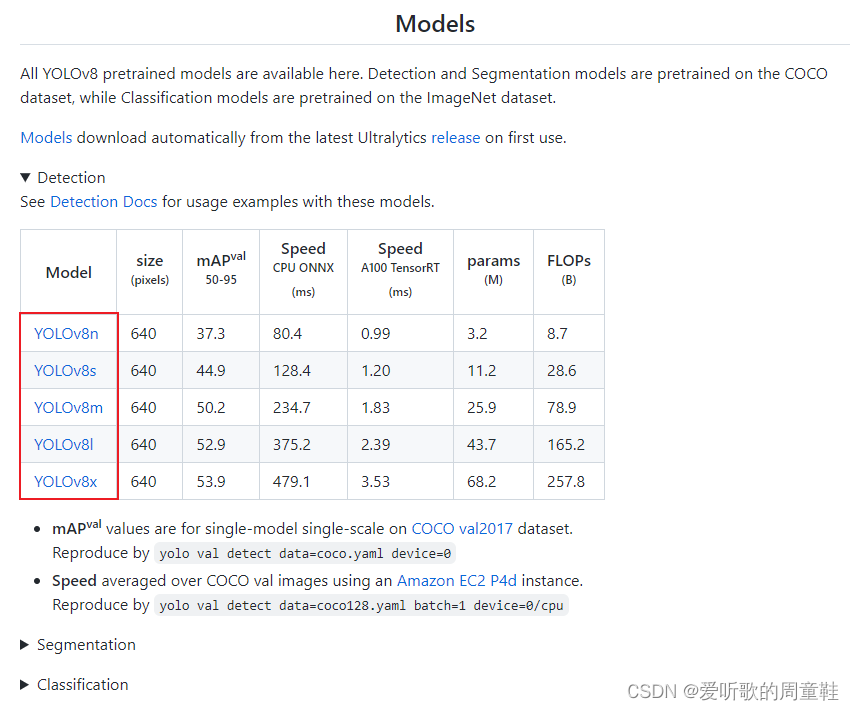
yolov8预训练权重可以通过here找到下图的Models,然后点击不同大小的权重即可下载,博主也提供下载好的几个预训练权重Baidu Drive[pwd:yolo],注意这是yolov8没固定版本的预训练权重,若后续有版本更新,记得替换。本次训练自己的数据集使用的预训练权重为yolov8n.pt
3. 训练模型
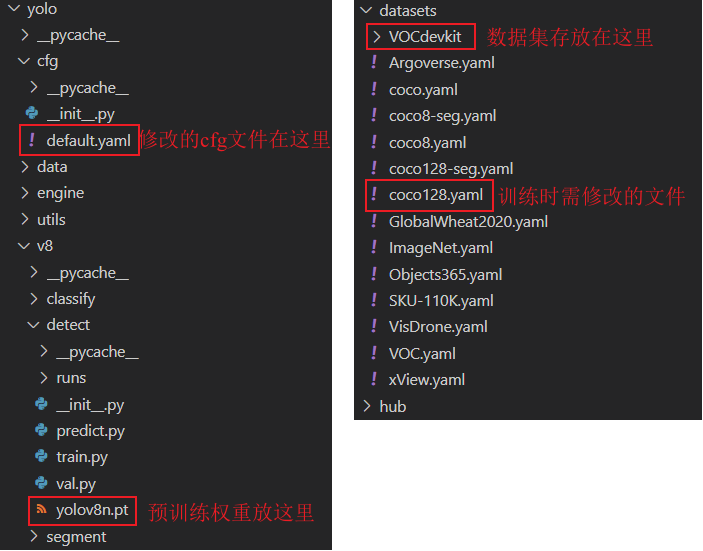
将准备好的数据集文件夹即VOCdevkit复制到yolov8项目环境中的ultralytics-main/ultralytics/datasets文件夹下,将准备好的预训练权重yolov8n.pt复制到yolov8项目环境中的ultralytics-main/ultralytics/yolo/v8/detect文件夹下。训练目标检测模型主要修改模型配置文件ultralytics-main/ultralytics/yolo/cfg/default.yaml以及数据配置文件ultralytics-main/ultralytics/datasets/coco128.yaml,项目结构如下所示
3.1 修改数据配置文件
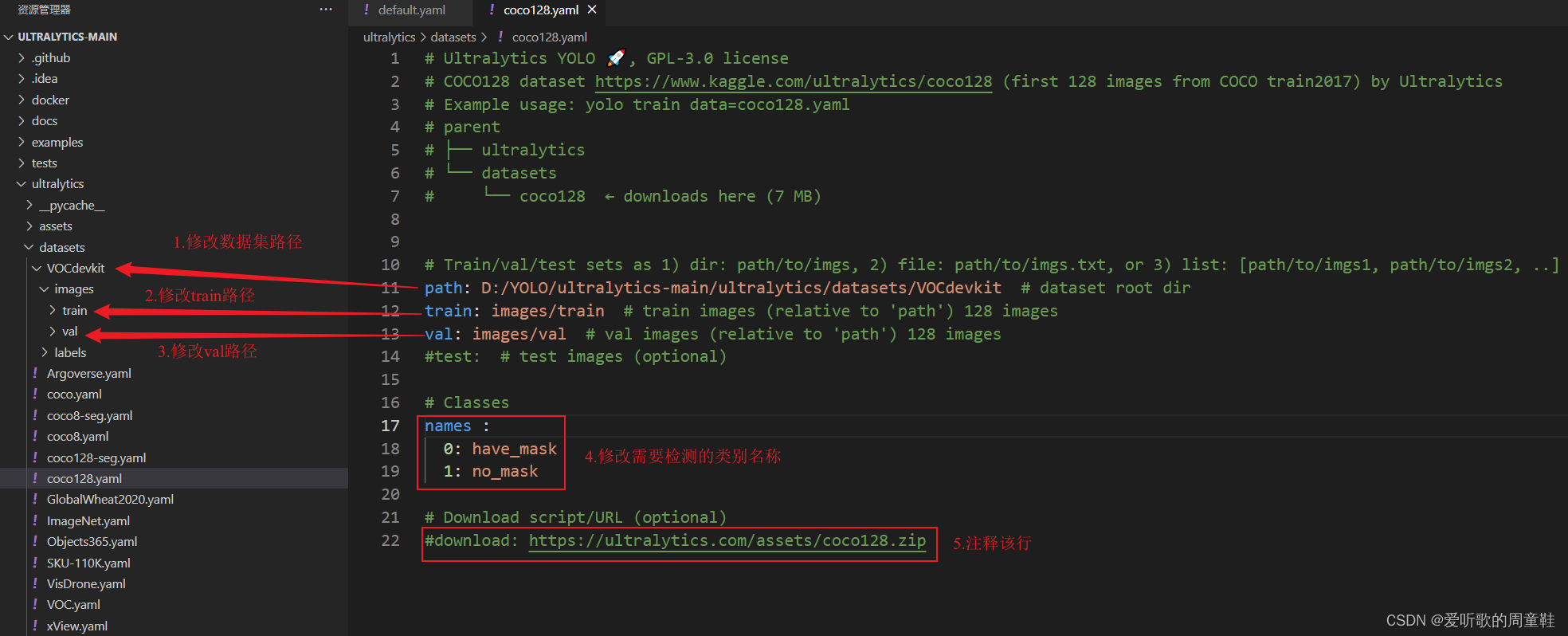
修改ultralytics/datasets目录下相应的yaml文件,找到该目录下的coco128.yaml文件,主要修改如下:
-
1.修改第11行的数据集的路径
-
2.修改第12行的train的路径
-
3.修改第13行的val路径
-
4.修改第17行的需要检测的类别名称
-
5.注释最后一行,取消coco数据集的下载
3.2 修改模型配置文件
修改ultralytics/yolo/cfg目录下对应的yaml文件,找到该目录下的default.yaml文件,主要修改如下:
-
1.修改第8行的模型文件,指定yolov8n.pt
-
2.修改第9行的数据文件路径,即3.1节的coco128.yaml
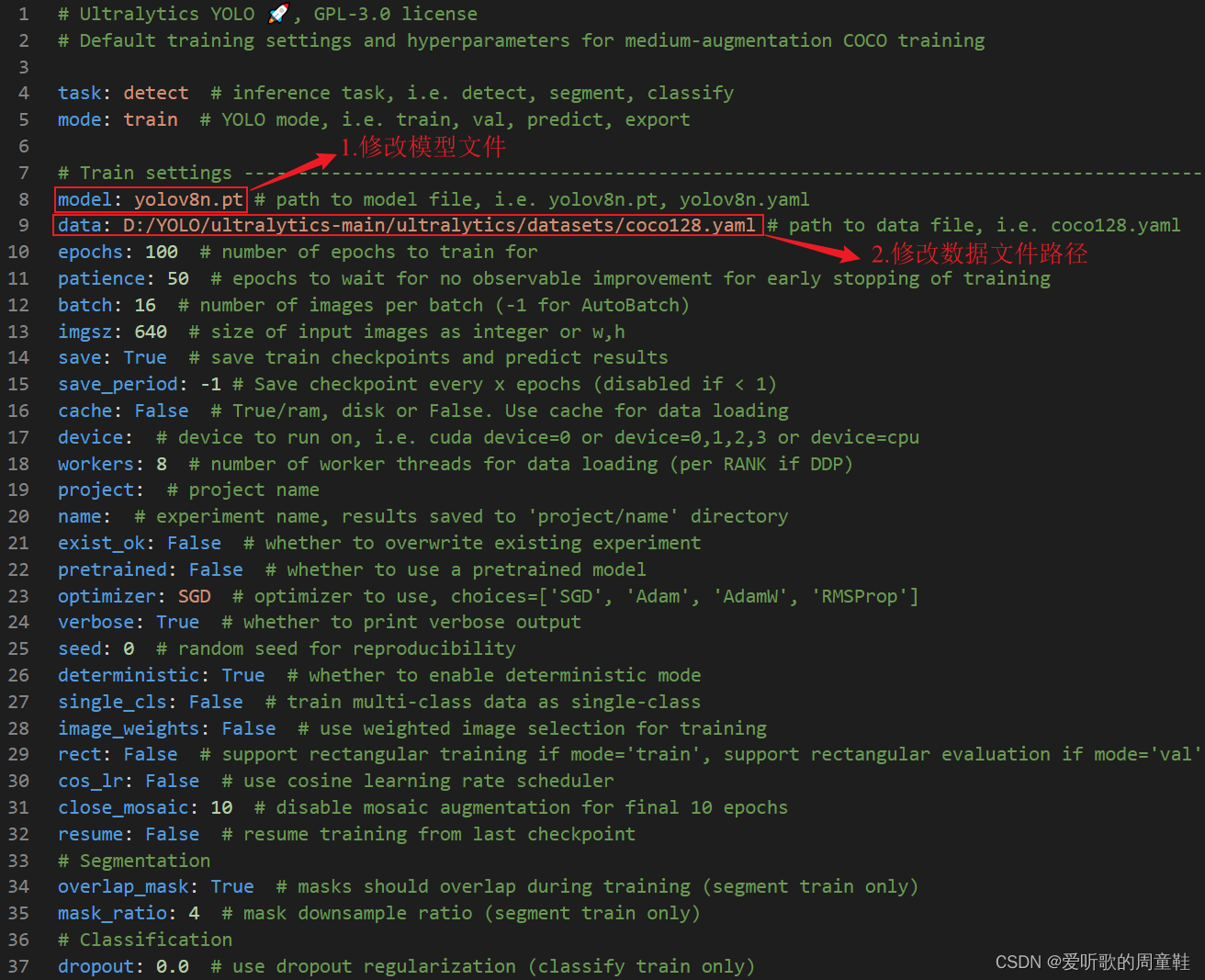
还有其它参数博主并未修改,如epoches训练轮数、batch批处理量等等,大家一定要根据自己的实际情况(如显卡算力等)指定不同的参数,如果你之前训练过yolov5,那我相信这对你来说应该是小case😄
3.3 训练模型
按照上面的步骤完成修改后可以找到yolo/v8/detect/train.py文件,点击运行即可开始训练。
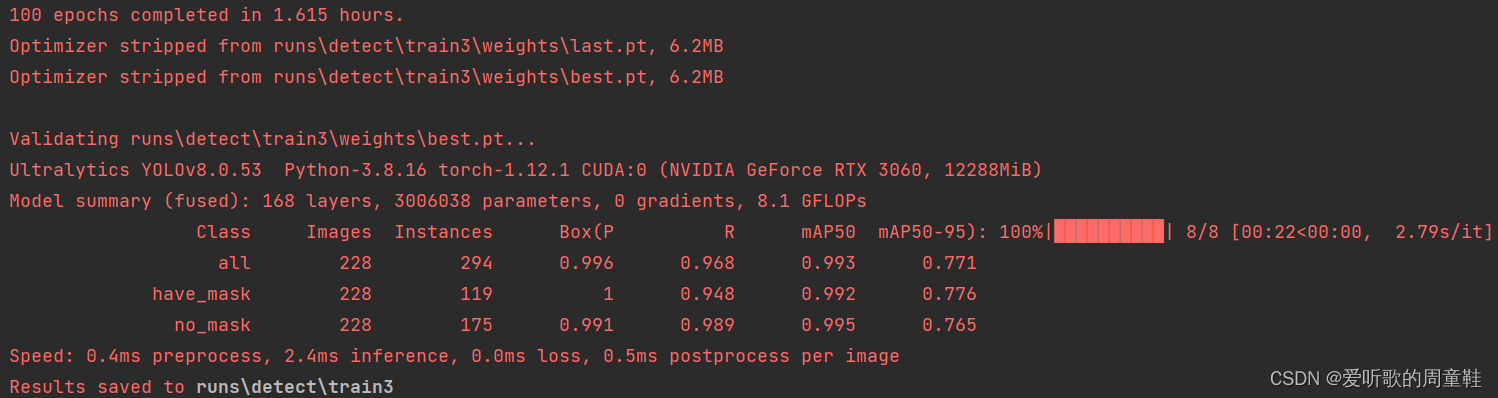
博主训练的模型为yolov8n.pt且使用的是单个GPU进行训练,显卡为RTX3060,操作系统为Windows10,pytorch版本为1.12.1,训练时长大概1.6个小时。
训练完成后的模型权重保存在runs/detect/train/weights文件夹下,后续使用best.pt进行后续模型部署工作即可,这里提供博主训练好的权重文件下载链接Baidu Driver[pwd:yolo]
3.4 推理测试
利用项目中的yolo/v8/detect/predict.py文件进行测试,将需要推理的图片放入ultralytics/assets文件夹下,将刚训练的口罩识别权重文件放入yolo/v8/detect文件夹下,最后在predict.py文件第86行指定刚训练的模型权重文件best.pt如下所示,点击运行predict.py即可执行测试
model = 'best.pt' # predict.py第86行修改
推理完成后会在detect/runs文件夹下生成一个detect/train目录,推理的结果保存在此目录下,推理结果如下所示


至此,yolov8模型训练已经完毕,下面开始jetson nano上的部署工作。
二、YOLOv8模型部署
Jetson nano上yolov8模型部署流程和yolov5、yolov7相差较大,主要换了一个部署框架,大家对jetson模型部署感兴趣的可以参考我之前发的Jetson嵌入式系列模型部署文章,这次带大家了解下一个全新的tensorrt封装,部署使用到的Github仓库是infer。该仓库通过
trtexec工具完成模型的构建工作。对模型部署有疑问的可以参考Jetson嵌入式系列模型部署-1,想了解通过TensorRT的Layer API一层层完成模型的搭建工作可参考Jetson嵌入式系列模型部署-2,想了解通过TensorRT的ONNX parser解析ONNX文件来完成模型的搭建工作可参考Jetson嵌入式模型部署-3、Jetson nano部署YOLOv7。本文主要针对infer项目中的yolov8完成嵌入式模型部署,本文参考自infer的README.md,具体操作流程作者描述非常详细,这里再简单过一遍,本次训练的模型使用yolov8n,类别数为2,为口罩识别😷。
1. 源码下载
infer的代码可以直接从github官网上下载,源码下载地址是https://github.com/shouxieai/infer,由于infer部署框架刚发布不久一个固定的版本都没有,故只能采用主分支进行yolov8的部署工作(PS:由于代码更新频繁,可能大家会遇到不同的bug)。Linux下代码克隆指令如下
$ git clone https://github.com/shouxieai/infer.git
也可手动点击下载,点击右上角的Code按键,将代码下载下来。至此整个项目就已经准备好了。也可以点击here[pwd:yolo]下载博主准备好的源代码(注意代码下载于2023/3/15日,若有改动请参考最新)
2. 环境配置
需要使用的软件环境有
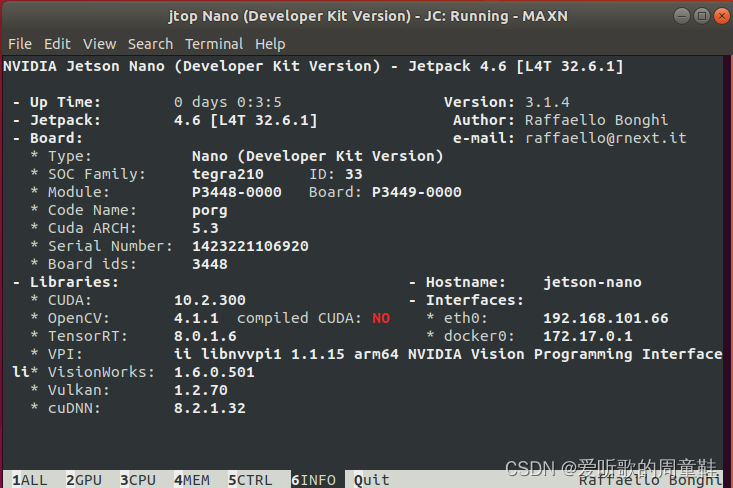
TensorRT、CUDA、CUDNN、OpenCV。所有软件环境在JetPack镜像中已经安装完成,只需要添加下trtexec工具的环境变量即可。博主使用的jetpack版本为JetPack4.6.1(PS:关于jetson nano刷机就不再赘述了,需要各位看官自行配置好相关环境😄,外网访问较慢,这里提供Jetson nano的JetPack镜像下载链接Baidu Drive[password:nano]【更新完毕!!!】几个(PS:提供4.6和4.6.1两个版本,注意4GB和2GB的区别,不要刷错了),关于Jetson Nano 2GB和4GB的区别可参考链接Jetson NANO是什么?如何选?。(吐槽下这玩意上传忒慢了,超级会员不顶用呀,终于上传完了,折磨!!!)
博主的Jetpack对应的软件环境如下
2.1 trtexec环境变量设置
trtexec环境变量的添加主要参考这里,主要包含以下几步
1.打开bashrc文件
vim ~/.bashrc
2.按i进入输入模式,在最后一行添加如下语句
export PATH=/usr/src/tensorrt/bin:$PATH
3.按下esc,输入:wq!保存退出即可,最后刷新下环境变量
source ~/.bashrc
3. ONNX导出
- 训练的模型使用yolov8n.pt,torch版本1.12.1,onnx版本1.13.1
- 参考自YoloV8的动态静态batch如何理解和使用
关于静态batch和动态batch有以下几点说明,更多细节请查看视频
静态batch
- 导出的onnx指定所有维度均为明确的数字,是静态shape模型
- 在推理的时候,它永远都是同样的batch推理,即使你目前只有一个图推理,它也需要n个batch的耗时
- 适用于大部分场景,整个代码逻辑非常简单
动态batch
- 导出的时候指定特定维度为dynamic,也就是不确定状态
- 模型推理时才决定所需推理的batch大小,耗时最优,但onnx复杂度提高了
- 适用于如server有大量不均匀的请求时的场景
3.1 静态batch导出
3.1.1 Transpose节点的添加
将训练好的口罩识别权重best.pt放在ultralytics-main主目录下,新建导出文件export.py,内容如下,执行完成后将会在当前目录生成导出的best.onnx模型
from ultralytics import YOLO
model = YOLO("best.pt")
success = model.export(format="onnx", batch=1)
模型需要完成修改才能正确被infer框架使用,正常模型导出的输出为[1,6,8400],其中1代表batch,6分别代表cx,cy,w,h,以及have_mask、no_mask两个类别分数,8400代表框的个数。首先infer框架的输出只支持[1,8400,6]这种形式的输出,因此我们需要在原始onnx的输出之前添加一个Transpose节点,infer仓库workspace/v8trans.py就是帮我们做这么一件事情,v8trans.py具体内容如下:
# v8trans.py
import onnx
import onnx.helper as helper
import sys
import os
def main():
if len(sys.argv) < 2:
print("Usage:\n python v8trans.py yolov8n.onnx")
return 1
file = sys.argv[1]
if not os.path.exists(file):
print(f"Not exist path: {file}")
return 1
prefix, suffix = os.path.splitext(file)
dst = prefix + ".transd" + suffix
model = onnx.load(file)
node = model.graph.node[-1]
old_output = node.output[0]
node.output[0] = "pre_transpose"
for specout in model.graph.output:
if specout.name == old_output:
shape0 = specout.type.tensor_type.shape.dim[0]
shape1 = specout.type.tensor_type.shape.dim[1]
shape2 = specout.type.tensor_type.shape.dim[2]
new_out = helper.make_tensor_value_info(
specout.name,
specout.type.tensor_type.elem_type,
[0, 0, 0]
)
new_out.type.tensor_type.shape.dim[0].CopyFrom(shape0)
new_out.type.tensor_type.shape.dim[2].CopyFrom(shape1)
new_out.type.tensor_type.shape.dim[1].CopyFrom(shape2)
specout.CopyFrom(new_out)
model.graph.node.append(
helper.make_node("Transpose", ["pre_transpose"], [old_output], perm=[0, 2, 1])
)
print(f"Model save to {dst}")
onnx.save(model, dst)
return 0
if __name__ == "__main__":
sys.exit(main())
在命令行终端输入如下指令即可添加Transpose节点,执行完成之后在当前目录下生成best.transd.onnx模型,该模型添加了Transpose节点。
python v8trans.py best.onnx
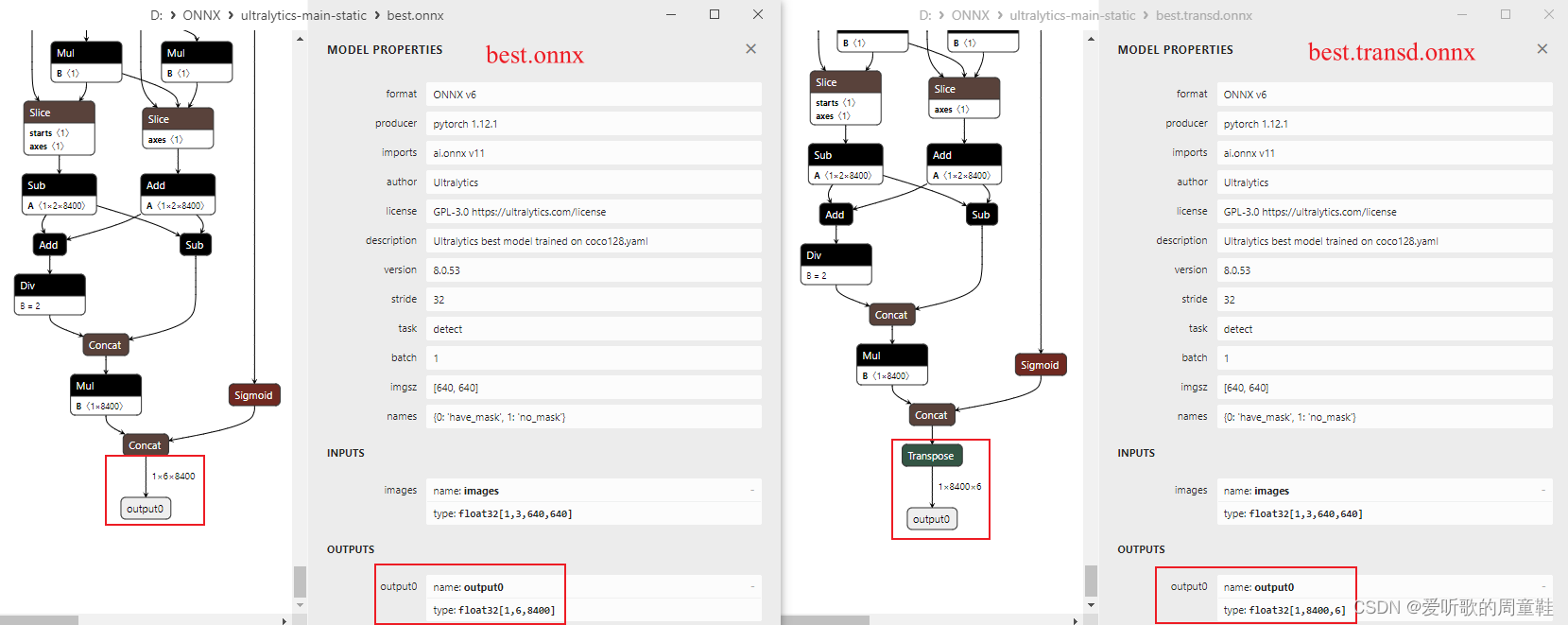
下图对比了原始的best.onnx和best.transd.onnx之间的区别,从图中可以看出转换后的onnx模型在输出之前多了一个Transpose节点,且输出的1,2维度进行了交换,符合infer框架。
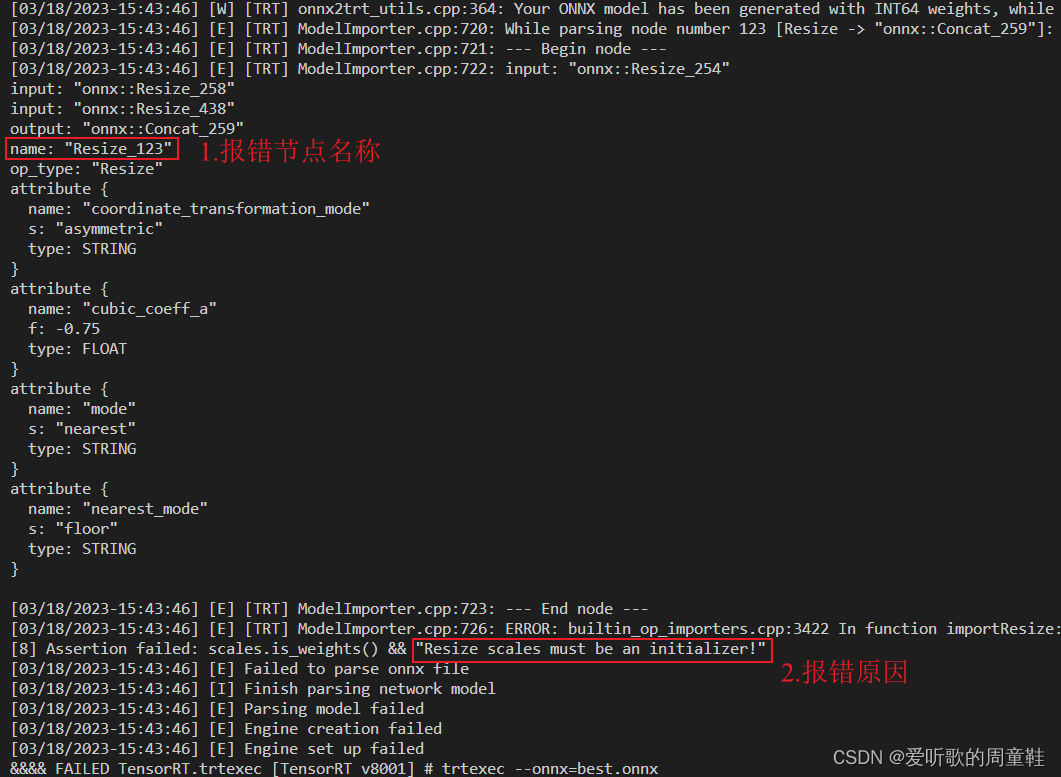
3.1.2 Resize节点解析的问题
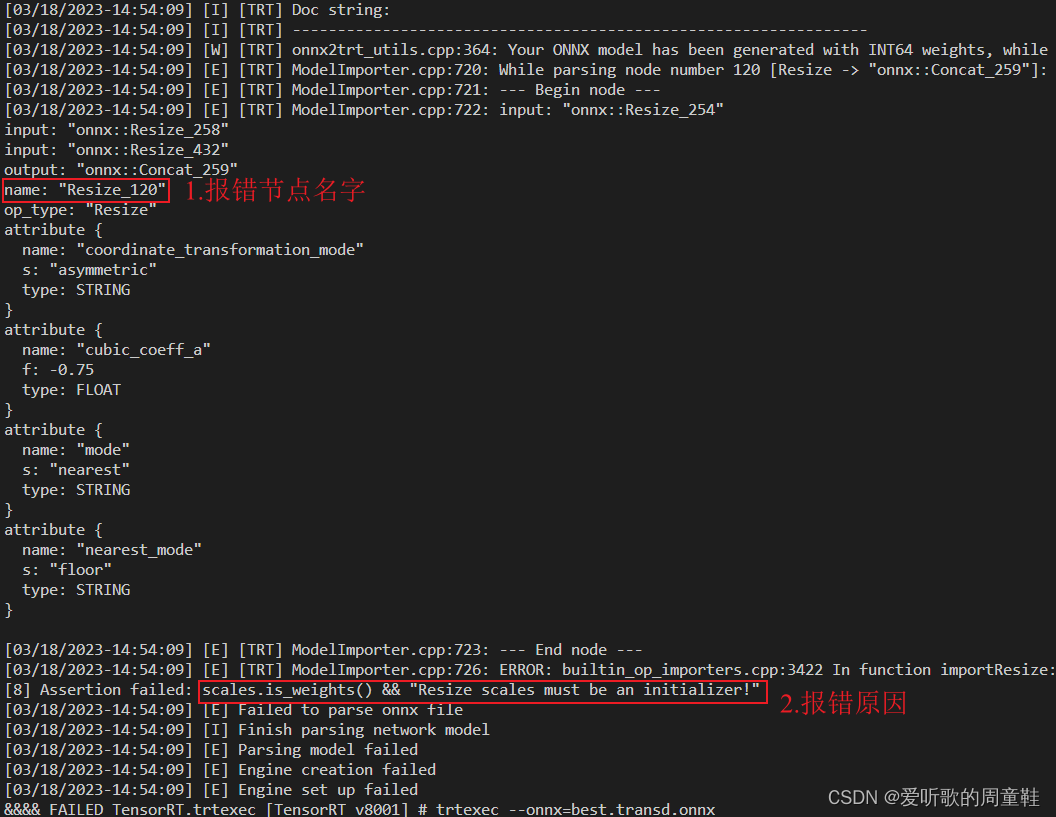
先剧透下,当使用trtexec工具构建engine时会出现错误,我们一并解决,到时候可直接生成engine,错误信息如下图所示,大概意思就是说Resize_120这个节点的scales没有初始化(应该是这样理解的吧🤔)
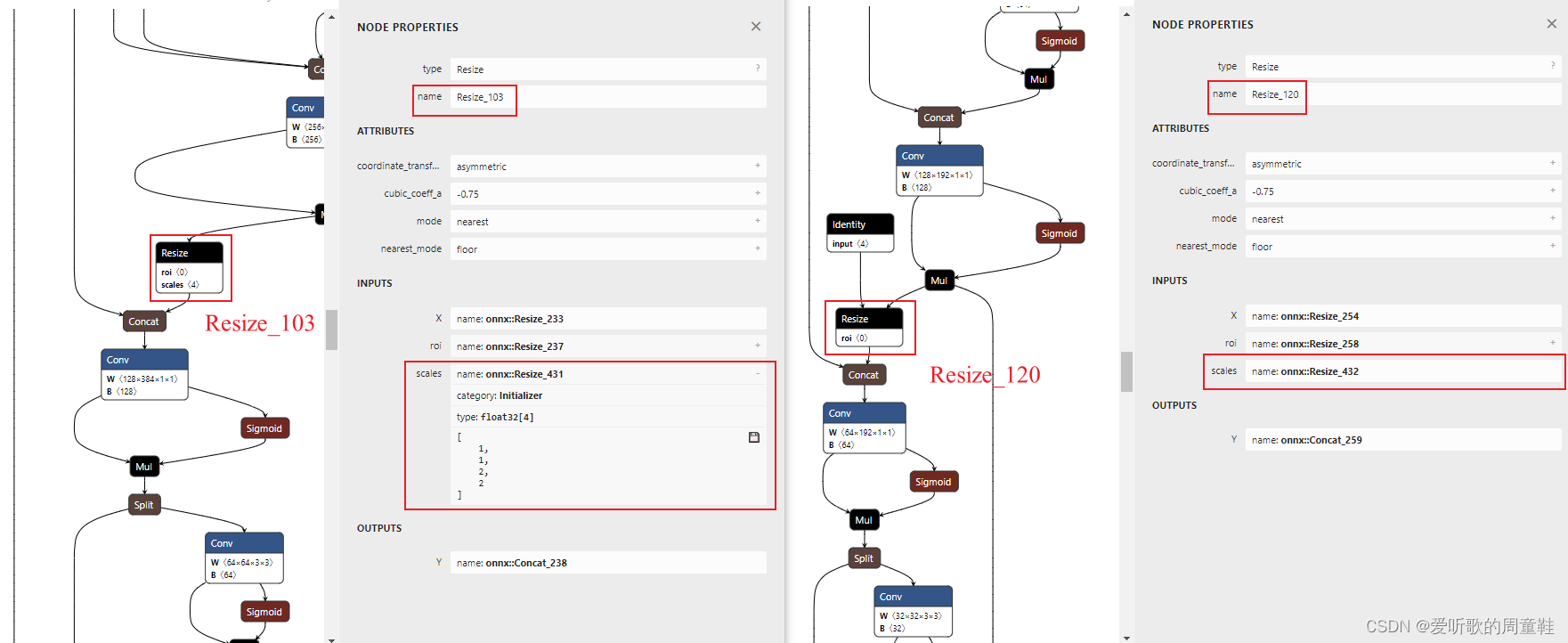
我们先通过Netron工具打开best.transd.onnx模型查看下Resize_120这个节点的相关信息,在找找其它的Resize节点对比看看,如下图所示,左边是Resize_103节点的相关信息,右边是Resize_120节点的相关信息,可以看到其对应的Scales确实存在区别,Resize_120节点Scales没有initializer,没有明确的值。
下面来看解决方案,提供两种
解决方案1-onnxsim(推荐)
onnxoptimizer、onnxsim被誉为onnx的优化利器,其中onnxsim可以优化常量,onnxoptimizer可以对节点进行压缩,参考自onnxoptimizer、onnxsim使用记录。新建一个v8onnxsim.py文件,用于优化onnx文件,具体内容如下:
import onnx
from onnxsim import simplify
onnx_model = onnx.load("best.transd.onnx")
model_simp, check = simplify(onnx_model)
assert check, "Simplified ONNX model could not be Validated"
onnx.save(model_simp, "best.transd.sim.onnx")
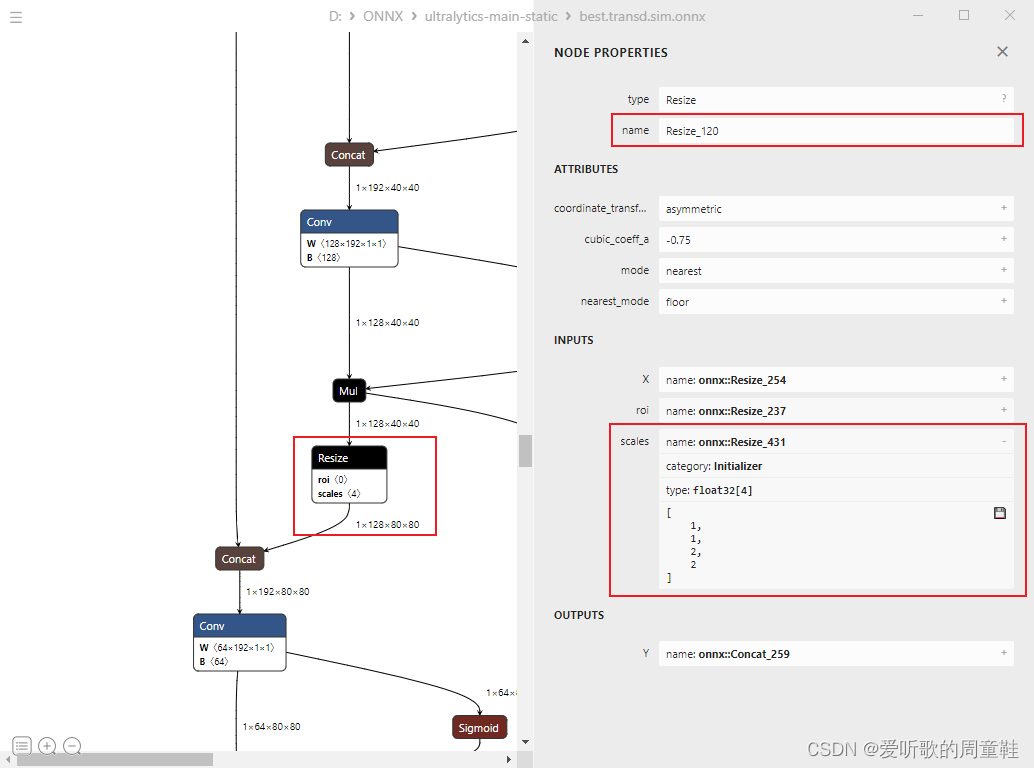
运行后会在当前文件夹生成一个best.transd.sim.onnx模型,现在可以查看对应的Resize_120节点发生了改变
解决方案2-自己动手
俗话说自己动手丰衣足食,看了onnxsim优化的结果,突然有种自己动手操作的欲望(PS:大家看个热闹即可😙)。主要步骤如下:
- 1.加载ONNX模型
- 2.遍历模型的所有节点,找到要操作的Resize_120
- 3.修改其输入从onnx::Resize_432变成onnx::Resize_431
- 4.删除Identit_2节点
- 5.保存模型
在当前目录下新建v8Resize.py文件,其内容如下:
import onnx
import onnx.helper as helper
import sys
import os
def main(file_path):
# 1.加载ONNX模型文件
model = onnx.load(file_path)
resize_node = None
# 2.遍历模型的所有节点,查找resize节点
# Resize_103 Resize_120
for node in model.graph.node:
if node.op_type == "Resize" and node.name == "Resize_120":
resize_node = node
break
if resize_node is None:
raise ValueError("Resize node not found in the model.")
# 3.修改输入
resize_node.input[2] = "onnx::Resize_431"
# 4.删除Identity_2节点
for i in range(len(model.graph.node)):
if model.graph.node[i].name == "Identity_2":
del model.graph.node[i]
break
# 5.保存新模型
onnx.save(model, "best.transd.my.onnx")
print("new model save done.")
if __name__ == "__main__":
file_path = "./best.transd.onnx"
sys.exit(main(file_path))
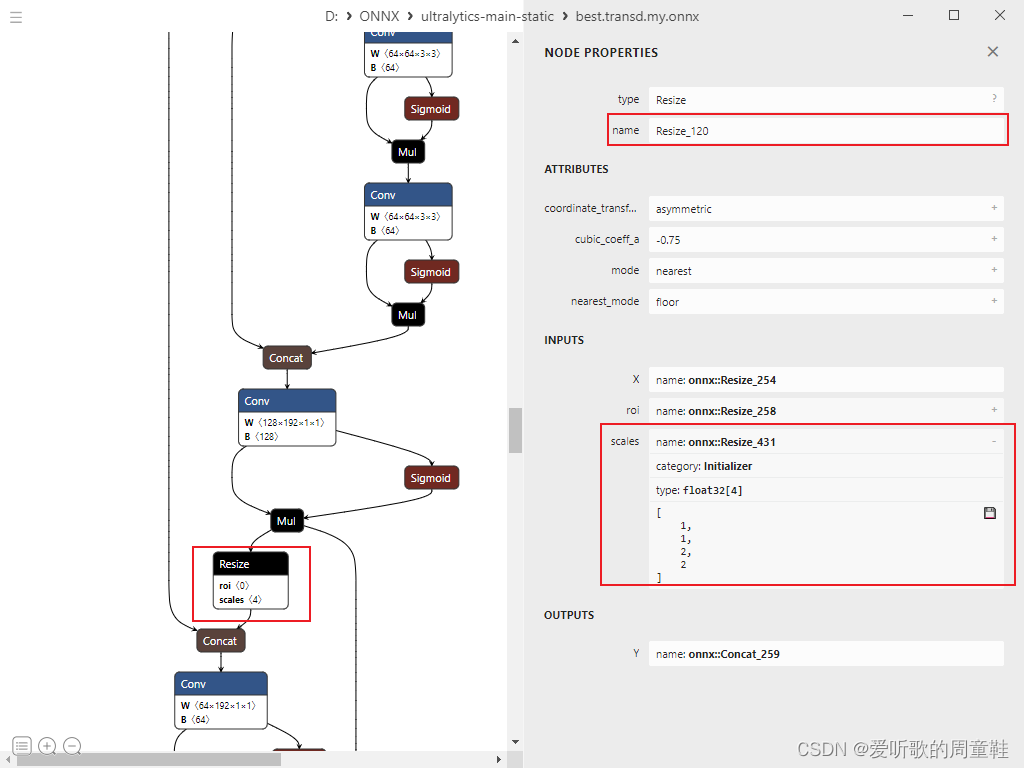
运行该文件后会在当前目录下生成best.transd.my.onnx模型,现在可以查看对应的Resize_120节点发生了改变
至此,静态batch模型导出告一段落,后续通过trtexec工具可正常生成engine文件了,主要解决两个方面的问题,一是输出必须加一个Transpose转换,二是解决Resize节点无法解析问题。
3.2 动态batch导出
3.2.1 exporter.py修改
动态batch的导出需要修改ultralytics/yolo/engine/exporter.py文件第303行的内容,确保导出的batch指定为动态,其它维度不指定,修改的内容如下:
# -----exporter.py第303行-----
# dynamic = self.args.dynamic
# if dynamic:
# dynamic = {'images': {0: 'batch', 2: 'height', 3: 'width'}} # shape(1,3,640,640)
# if isinstance(self.model, SegmentationModel):
# dynamic['output0'] = {0: 'batch', 1: 'anchors'} # shape(1,25200,85)
# dynamic['output1'] = {0: 'batch', 2: 'mask_height', 3: 'mask_width'} # shape(1,32,160,160)
# elif isinstance(self.model, DetectionModel):
# dynamic['output0'] = {0: 'batch', 1: 'anchors'} # shape(1,25200,85)
# -----修改为如下代码-----
dynamic = self.args.dynamic
dynamic = True
if dynamic:
dynamic = {'images': {0: 'batch'}} # shape(1,3,640,640)
if isinstance(self.model, SegmentationModel):
dynamic['output0'] = {0: 'batch', 1: 'anchors'} # shape(1,25200,85)
dynamic['output1'] = {0: 'batch', 2: 'mask_height', 3: 'mask_width'} # shape(1,32,160,160)
elif isinstance(self.model, DetectionModel):
dynamic['output0'] = {0: 'batch'} # shape(1,25200,85)
然后将训练好的口罩识别权重best.pt放在ultralytics-main目录下,新建导出文件export.py,内容如下,执行完成后将会在当前目录下生成导出的best.onnx模型
from ultralytics import YOLO
model = YOLO("best.pt")
success = model.export(format='onnx', batch=1)
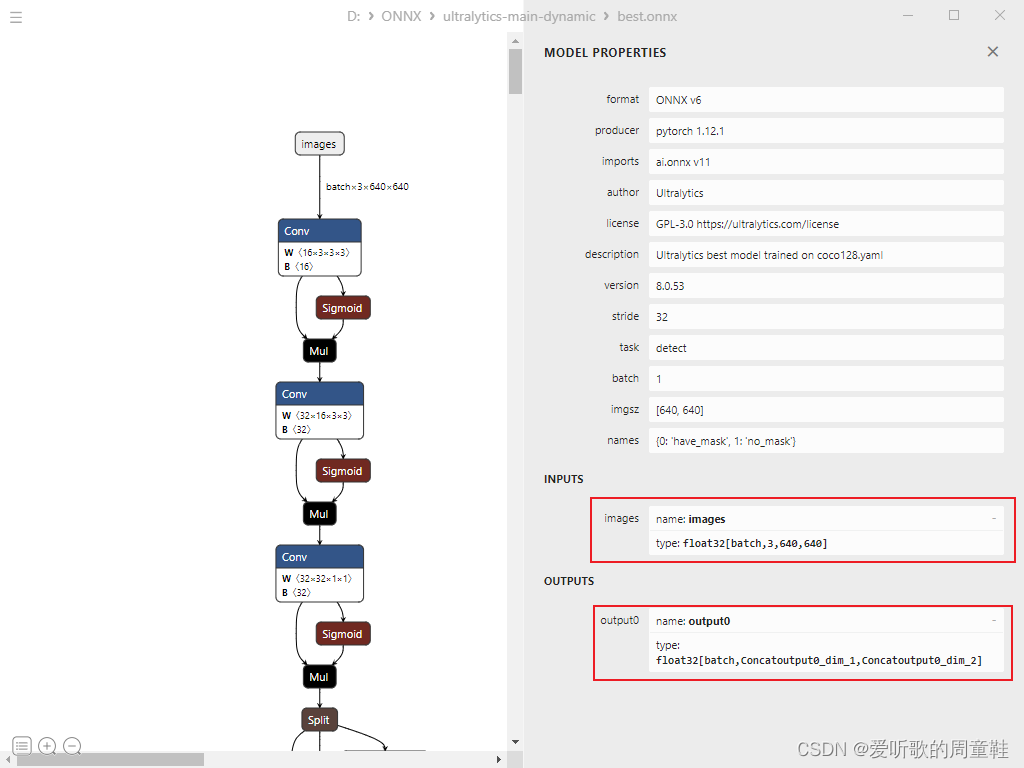
导出的onnx模型如下:
3.2.2 Transpose节点添加
由于infer框架只支持[1,8400,6]这种形式的输出,因此我们需要在原始onnx之前添加一个Transpose节点,infer仓库workspace/v8trans.py就是帮我们做这么一件事情,v8trans.py具体内容可参考3.1.1小节,这里不再赘述。
3.2.3 Resize节点解析的问题
同样的当使用trtexec工具构建engine时,会出现Resize节点解析错误
废话少说,直接上解决方案
解决方案1-onnxsim
import onnx
from onnxsim import simplify
onnx_model = onnx.load("best.onnx")
model_simp, check = simplify(onnx_model)
assert check, "Simplified ONNX model could not be Validated"
onnx.save(model_simp, "best.sim.onnx")
解决方案2-自己动手
import onnx
import onnx.helper as helper
import sys
import os
def main(file_path):
# 1.加载ONNX模型文件
model = onnx.load(file_path)
resize_node = None
# 2.遍历模型的所有节点,查找resize节点
# Resize_106 Resize_123
for node in model.graph.node:
if node.op_type == "Resize" and node.name == "Resize_123":
resize_node = node
break
if resize_node is None:
raise ValueError("Resize node not found in the model.")
# 3.修改输入
resize_node.input[2] = "onnx::Resize_437"
# 4.删除Identity_5节点
for i in range(len(model.graph.node)):
if model.graph.node[i].name == "Identity_5":
del model.graph.node[i]
break
# 5.保存新模型
onnx.save(model, "best.my.onnx")
print("new model save done.")
if __name__ == "__main__":
file_path = "./best.onnx"
sys.exit(main(file_path))
至此,模型导出已经完毕,后续通过导出的模型完成在jetson nano上的部署工作,导出的模型文件可点击here[pwd:yolo]下载
4. 运行
4.1 engine生成
与tensorRT_Pro模型构建方式不同,infer框架直接通过trtexec工具生成engine,infer框架拥有一个全新的tensorrt封装,可轻易继承各类任务,相比于tensorRT_Pro优点如下:
- 轻易实现各类任务的生产者和消费者模型,并进行高性能推理
- 没有复杂的封装,彻底解开耦合!
- 参考自如何高效使用TensorRT
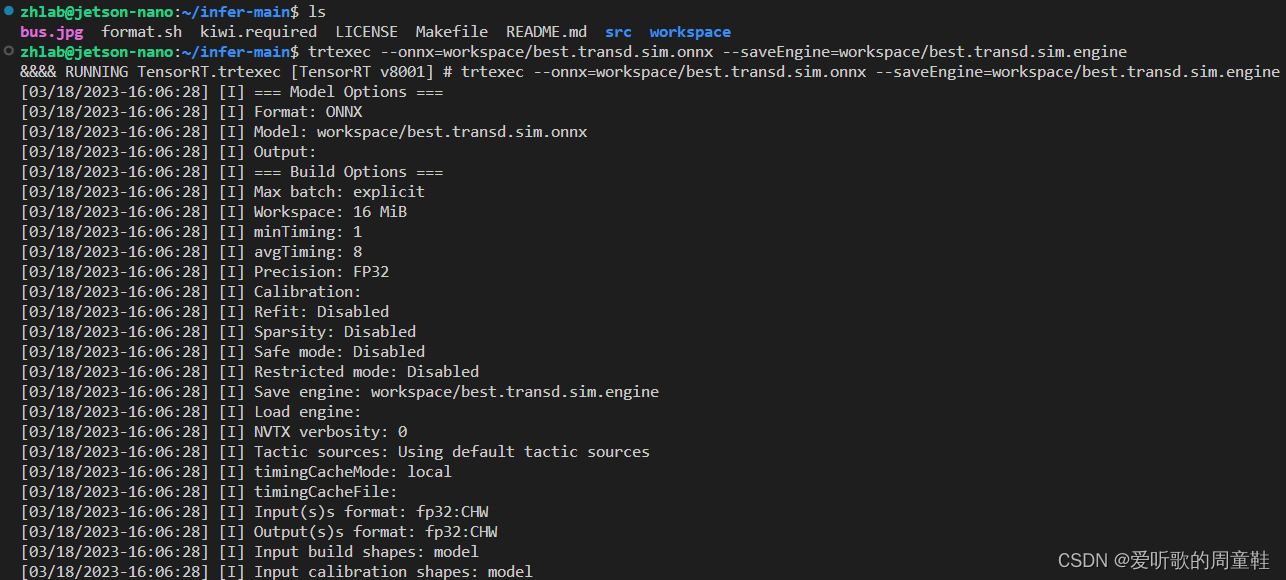
将第3节导出的ONNX模型放入到infer/workspace文件夹下,然后在jetson nano终端执行如下指令(以导出的静态batch模型为例)
trtexec --onnx=workspace/best.transd.sim.onnx --saveEngine=workspace/best.transd.sim.engine
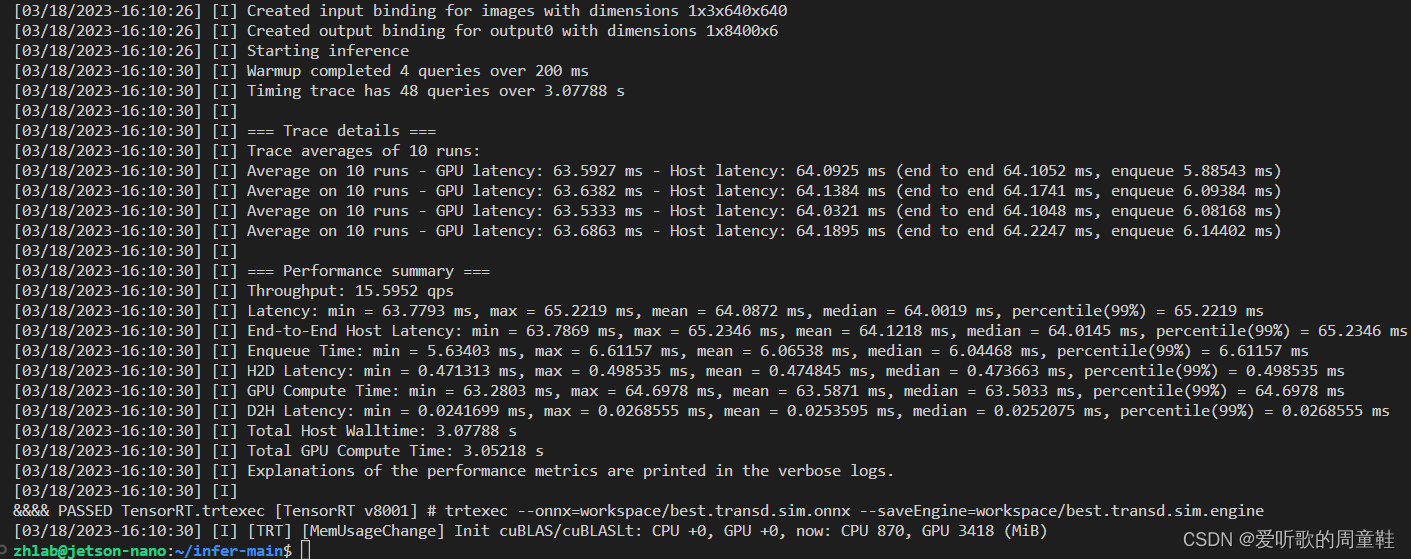
图解如下所示(PS:模型构架需要一段时间,请耐心等待)
模型构建完成后如下图所示,engine拿到手后就可以开干了👨🏭
注:导出动态batch模型执行的指令与静态batch不同!!!,具体可参考infer/workspace/build.sh文件中的内容,指令如下:
trtexec --onnx=best.transd.sim.onnx --minShapes=images:1x3x640x640 --maxShapes=images:16x3x640x640 --optShapes=images:1x3x640x640 --saveEngine=best.transd.sim.engine
4.2 源码修改
yolo模型的推理代码主要在
src/main.cpp文件中,需要推理的图片放在workspace/inference文件夹中,源码修改较简单主要有以下几点:
-
1.main.cpp 134,135行注释,只进行单张图片的推理
-
2.main.cpp 104行 修改加载的模型为best.transd.sim.engine且类型为V8
-
3.main.cpp 10行 新增mylabels数组,添加自训练模型的类别名称
-
4.mian.cpp 115行 cocolabels修改为mylabels
具体修改如下
int main() {
// perf(); //修改1 134 135行注释
// batch_inference();
single_inference();
return 0;
}
auto yolo = yolo::load("best.transd.sim.engine", yolo::Type::V8); // 修改2
static const char *mylabels[] = {"have_mask", "no_mask"}; // 修改3 新增mylabels数组
auto name = mylabels[obj.class_label] // 修改4 cocolabels修改为mylabels
4.3 编译运行
编译用到的Makefile文件需要修改,修改后的Makefile文件如下,详细的Makefile文件的分析可查看Mkaefile实战
cc := g++
nvcc = /usr/local/cuda-10.2/bin/nvcc
cpp_srcs := $(shell find src -name "*.cpp")
cpp_objs := $(cpp_srcs:.cpp=.cpp.o)
cpp_objs := $(cpp_objs:src/%=objs/%)
cpp_mk := $(cpp_objs:.cpp.o=.cpp.mk)
cu_srcs := $(shell find src -name "*.cu")
cu_objs := $(cu_srcs:.cu=.cu.o)
cu_objs := $(cu_objs:src/%=objs/%)
cu_mk := $(cu_objs:.cu.o=.cu.mk)
include_paths := src \
/usr/include/opencv4 \
/usr/include/aarch64-linux-gnu \
/usr/local/cuda-10.2/include
library_paths := /usr/lib/aarch64-linux-gnu \
/usr/local/cuda-10.2/lib64
link_librarys := opencv_core opencv_highgui opencv_imgproc opencv_videoio opencv_imgcodecs \
nvinfer nvinfer_plugin nvonnxparser \
cuda cublas cudart cudnn \
stdc++ dl
empty :=
export_path := $(subst $(empty) $(empty),:,$(library_paths))
run_paths := $(foreach item,$(library_paths),-Wl,-rpath=$(item))
include_paths := $(foreach item,$(include_paths),-I$(item))
library_paths := $(foreach item,$(library_paths),-L$(item))
link_librarys := $(foreach item,$(link_librarys),-l$(item))
cpp_compile_flags := -std=c++11 -fPIC -w -g -pthread -fopenmp -O0
cu_compile_flags := -std=c++11 -g -w -O0 -Xcompiler "$(cpp_compile_flags)"
link_flags := -pthread -fopenmp -Wl,-rpath='$$ORIGIN'
cpp_compile_flags += $(include_paths)
cu_compile_flags += $(include_paths)
link_flags += $(library_paths) $(link_librarys) $(run_paths)
ifneq ($(MAKECMDGOALS), clean)
-include $(cpp_mk) $(cu_mk)
endif
pro := workspace/pro
expath := library_path.txt
library_path.txt :
@echo LD_LIBRARY_PATH=$(export_path):"$$"LD_LIBRARY_PATH > $@
workspace/pro : $(cpp_objs) $(cu_objs)
@echo Link $@
@mkdir -p $(dir $@)
@$(cc) $^ -o $@ $(link_flags)
objs/%.cpp.o : src/%.cpp
@echo Compile CXX $<
@mkdir -p $(dir $@)
@$(cc) -c $< -o $@ $(cpp_compile_flags)
objs/%.cu.o : src/%.cu
@echo Compile CUDA $<
@mkdir -p $(dir $@)
@$(nvcc) -c $< -o $@ $(cu_compile_flags)
objs/%.cpp.mk : src/%.cpp
@echo Compile depends CXX $<
@mkdir -p $(dir $@)
@$(cc) -M $< -MF $@ -MT $(@:.cpp.mk=.cpp.o) $(cpp_compile_flags)
objs/%.cu.mk : src/%.cu
@echo Compile depends CUDA $<
@mkdir -p $(dir $@)
@$(nvcc) -M $< -MF $@ -MT $(@:.cu.mk=.cu.o) $(cu_compile_flags)
run : workspace/pro
@cd workspace && ./pro
clean :
@rm -rf objs workspace/pro
@rm -rf library_path.txt
@rm -rf workspace/Result.jpg
# 导出符号,使得运行时能够链接上
export LD_LIBRARY_PATH:=$(export_path):$(LD_LIBRARY_PATH)
OK!源码也修改好了,Makefile文件也搞定了,可以编译运行了,直接在终端执行如下指令即可
make run
图解如下所示:
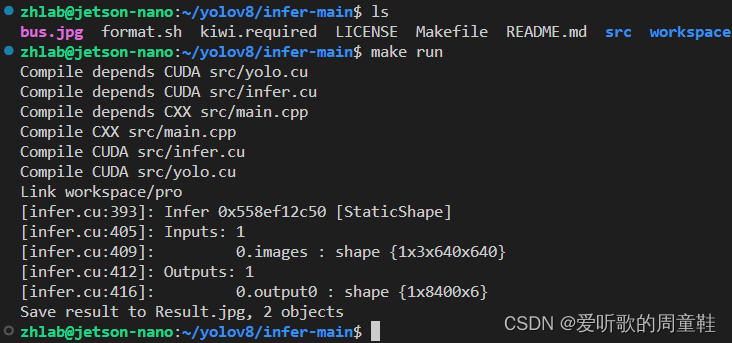
编译运行后的将在worksapce下生成Result.jpg为推理后的图片,如下所示,可以看到效果还是比较OK的。


4.4 拓展-摄像头检测
简单写了一个摄像头检测的demo,主要修改以下几点:
-
1.main.cpp 新增yolo_video_demo()函数,具体内容参考下面
-
2.main.cpp 新增调用yolo_video_demo()函数代码,具体内容参考下面
static void yolo_video_demo(const string& engine_file){ // 修改1 新增函数
auto yolo = yolo::load(engine_file, yolo::Type::V8);
if (yolo == nullptr) return;
// auto remote_show = create_zmq_remote_show();
cv::Mat frame;
cv::VideoCapture cap(0);
if (!cap.isOpened()){
printf("Engine is nullptr");
return;
}
while(true){
cap.read(frame);
auto objs = yolo->forward(cvimg(frame));
for(auto &obj : objs) {
uint8_t b, g, r;
tie(b, g, r) = yolo::random_color(obj.class_label);
cv::rectangle(frame, cv::Point(obj.left, obj.top), cv::Point(obj.right, obj.bottom),
cv::Scalar(b, g, r), 5);
auto name = mylabels[obj.class_label];
auto caption = cv::format("%s %.2f", name, obj.confidence);
int width = cv::getTextSize(caption, 0, 1, 2, nullptr).width + 10;
cv::rectangle(frame, cv::Point(obj.left - 3, obj.top - 33),
cv::Point(obj.left + width, obj.top), cv::Scalar(b, g, r), -1);
cv::putText(frame, caption, cv::Point(obj.left, obj.top - 5), 0, 1, cv::Scalar::all(0), 2, 16);
}
imshow("frame", frame);
// remote_show->post(frame);
int key = cv::waitKey(1);
if (key == 27)
break;
}
cap.release();
cv::destroyAllWindows();
return;
}
int main() { // 修改2 调用该函数
// perf();
// batch_inference();
// single_inference();
yolo_video_demo("best.transd.sim.engine");
return 0;
}
修改完成后执行make run即可看到对应的画面显示了
4.5 拓展-trtexec参数
trtexec是NVIDIA TensorRT SDK中的一个实用工具,它允许用户从命令行轻松运行和测试TensorRT引擎。trtexec命令行工具可以使用以下参数:
./trtexec [-h] [--uff model.uff [model.uff ...]] [--onnx model.onnx] [--model=model.plan] [--deploy=<deploy.prototxt>] [--output=<output_name>] [--batch=N] [--device=N] [--workspace=N] [--fp16] [--int8] [--calib=<dir>] [--useDLA=N] [--allowGPUFallback] [--iterations=N] [--avgRuns=N] [--verbose] [--nshapes=N] [--optShapes=NxN ... NxN] [--minShapes=NxN ... NxN] [--maxShapes=NxN ... NxN] [--shapeInput={0,1,2,...}] [--tacticSources] [--loadEngine=<filename>] [--saveEngine=<filename>] [--plugins=<XML file>] [--dumpOutput=<filename>] [--excludePlugin=<name>] [--start=<tag>] [--streams=N] [--batchTile] [--engine=<filename>] [--uffInput=input_name,input_shape] [--uffNHWC] [--uffNCHW] [--uffHW=<value>] [--workspaceSize=<size>] [--buildOnly] [--engineFormat=<format>] [--refit] [--saveRefinedEngine=<filename>] [--calibrator=<classname>] [--detach] [--check] [--fp16Char] [--int8Calib=<dir>] [--int8IO] [--disableTensorCores] [--useSpinWait] [--shapes=<shape>] [--maxBatch=<size>]
其中一些重要的参数如下:
--uff:指定输入为UFF模型,后面跟上模型文件的路径。--onnx:指定输入为ONNX模型,后面跟上模型文件的路径。--model:指定输入为序列化的引擎文件,后面跟上文件路径。--deploy:指定输入为Caffe deploy文件的路径。--output:指定输出Tensor名称。--batch:指定执行推理时每个batch的大小,默认为1。--device:指定执行推理的设备编号,默认为0。--workspace:指定GPU内存的最大使用量,默认为1GB。--fp16:启用FP16精度,可提高推理性能和减少内存使用。--int8:启用INT8精度,可进一步提高推理性能和减少内存使用。--calib:指定INT8校准数据集的路径。--useDLA:指定使用哪个DLA,以及在DLA上运行哪些层。--allowGPUFallback:如果使用DLA,当某些层无法在DLA上运行时,是否允许将其回退到GPU。--iterations:指定测试迭代次数。--avgRuns:指定平均运行次数。--verbose:打印更详细的输出信息。--loadEngine:指定加载的TensorRT引擎文件,后面跟上文件路径--saveEngine:指定生成的TensorRT引擎文件,后面跟上文件路径
结语
本篇博客介绍了关于yolov8模型训练的流程,以及在jetson nano嵌入式上的部署工作,并安利了一个全新的推理部署框架infer。博主在这里只做了最基础的演示,如果有更多的需求需要各位看官自己去挖掘啦😄。感谢各位看到最后,创作不易,读后有收获的看官请帮忙点个👍⭐️。
下载链接
- yolov8源码[pwd:yolo]
- 口罩识别数据集[password:yolo]
- yolov8预训练权重[pwd:yolo]
- yolov8口罩识别权重[pwd:yolo]
- infer源码[pwd:yolo]
- JetPack镜像[password:nano]