局部形状描述子应具备三方面的优势:
1、对噪声和因遮挡而产生的数据缺陷具有一定鲁棒性;
2、能够精确的描述三维对象的几何信息;
3、能够处理低分辨率数据
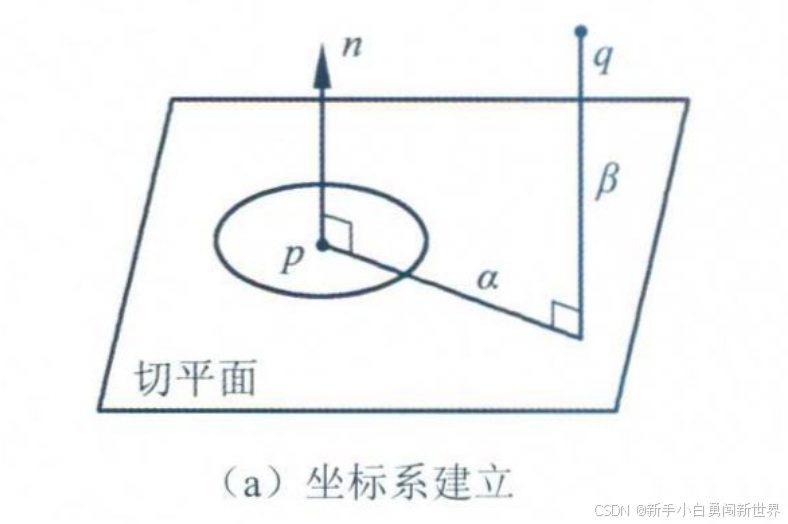
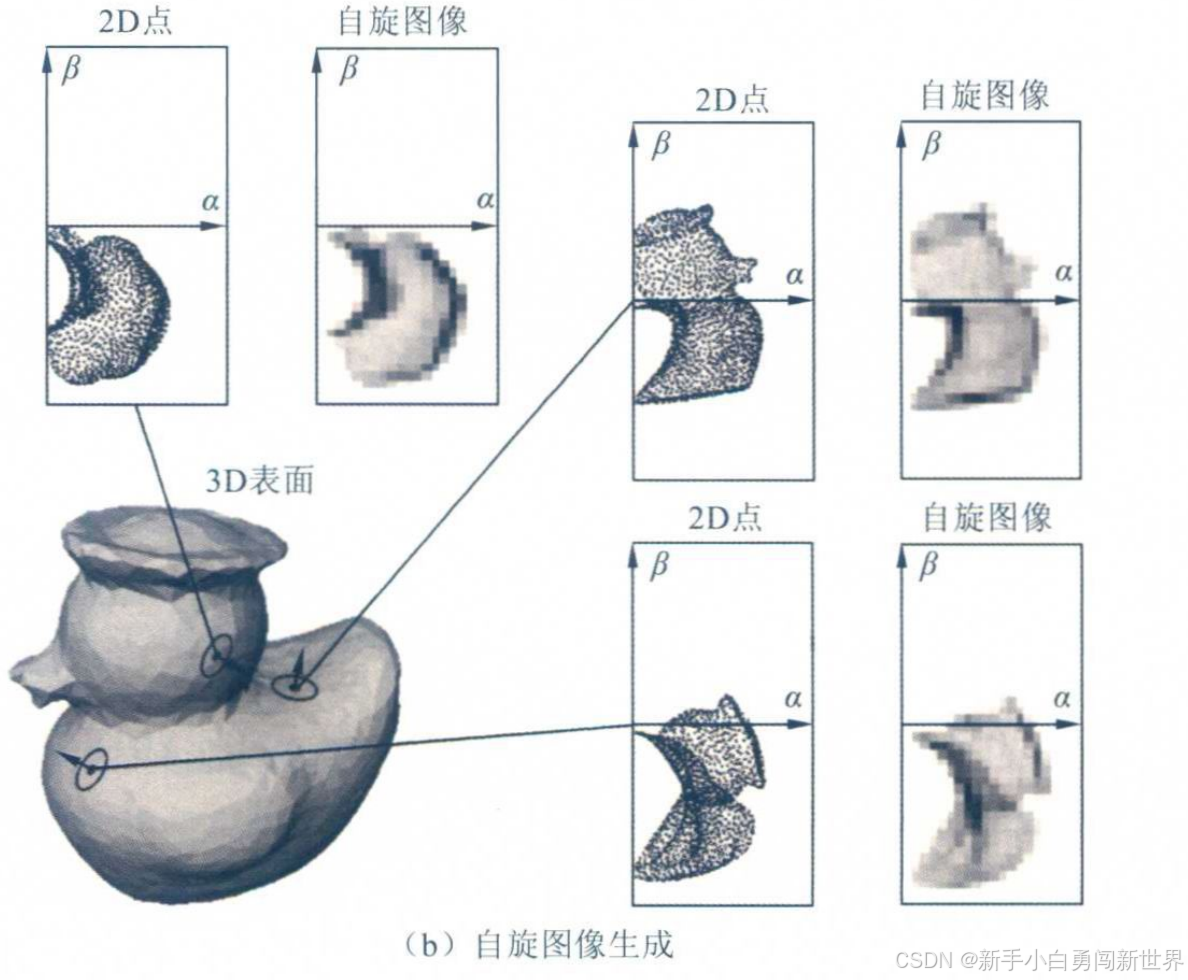
自旋影像Spin Image(SI):二维形状上下文
向量的内积(点积):
利用点和局部法向量构建局部坐标系,将其邻域点转化为局部坐标,计算每个网格中点的个数,具有旋转和平移不变性。用点p和其法向量n为基,把所有点云做的一个3D->2D映射。点云中任一点x,映射为到n的距离和到P平面距离一个二维坐标。
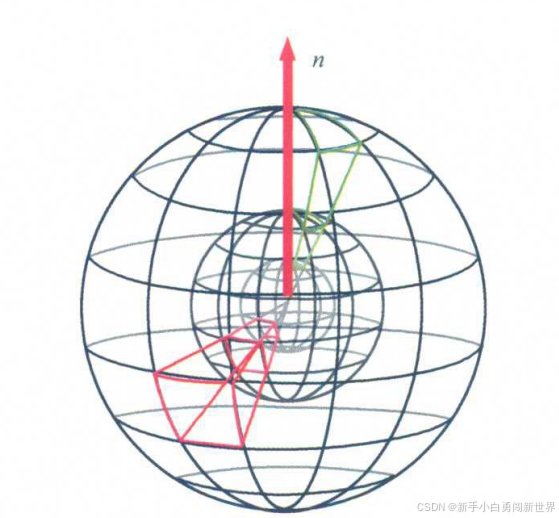
三维形状上下文描述子(3DSC)
利用点、法向量构建局部坐标系,在半径方向(对数间距)、经纬线方向(等间距)对球形邻域进行格网划分,根据体积归一化和密度归一化累计落入每个网格的加权点数。
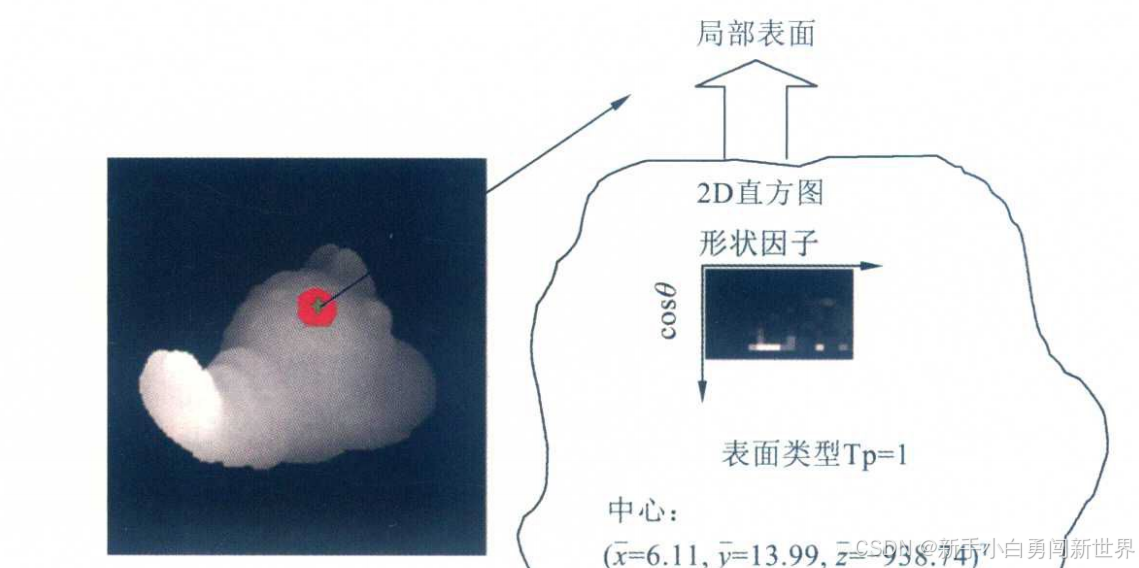
局部表面块LSP:
利用局部表面类型、中心坐标、特征直方图刻画邻域点的空间分布,根据关键点,利用一定距离范围内且与点的法向量夹角一定阈值的点构成局部表面块,计算表面块平均曲率和高斯曲率,判断表面块的类型,根据公式计算每个点的形状指数,
其中
最后,将SI与法向夹角离散化得到特征直方图。
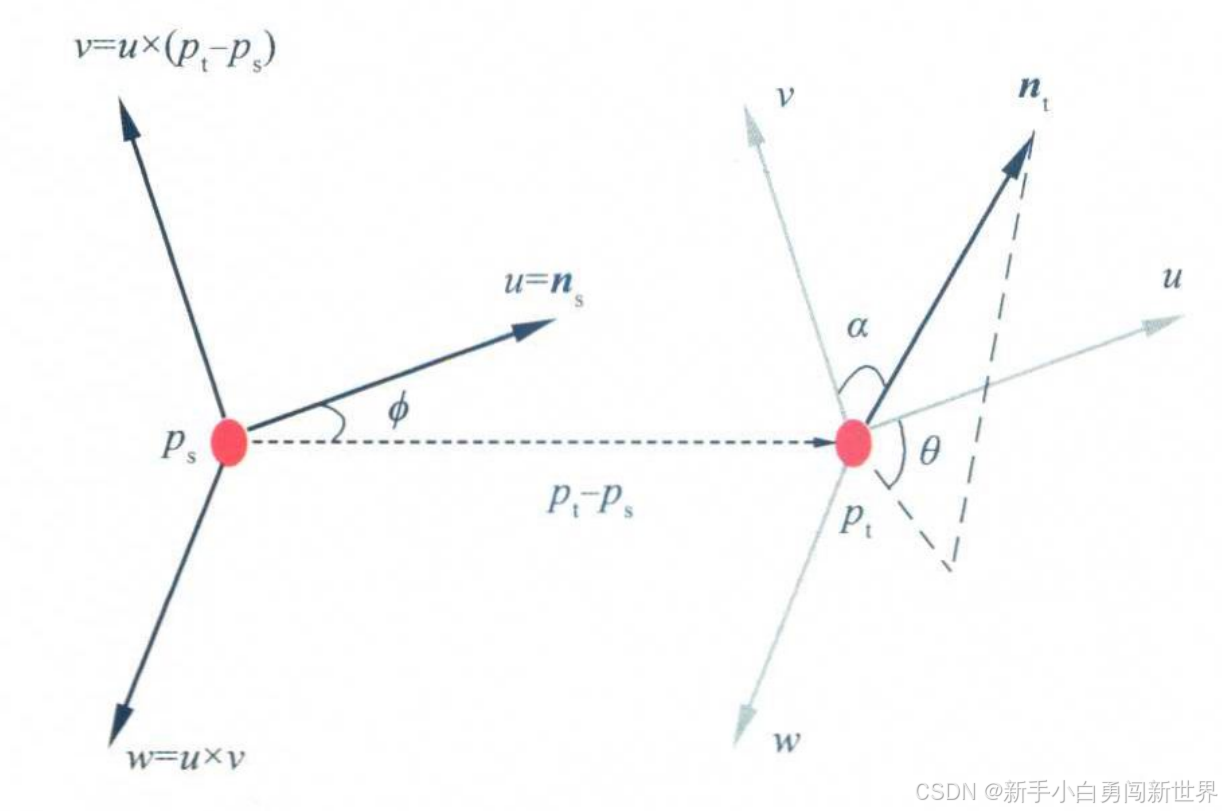
FPFH快速点特征直方图:
特征点与邻域点和法向量的关系
通过感兴趣点与其邻域点构建局部坐标,得到三个夹角,即三元素
- 为查询点求得它和其k邻域内每个点之间的三个特征元素值,然后统计成一个SPFH;
- 分别对k邻域中的每个点确定k邻域,按第一步分别形成自己的SPFH;
- 对邻域中的各个SPFH进行加权统计
本征形状签名描述子ISS:
1.建立关键点的局部坐标系;
2.求关键点与领域点的协方差矩阵;
3.利用协方差矩阵的特征值之间关系来形容该点的特征程度。
SHOT特征
计算特征点周围的k邻近点构建了协方差矩阵M,对M进行特征分解,得到特征向量并用其构建局部参考系,它具有旋转和平移不变性,正方向取该集合中点的个数大者。计算局部坐标系的每个划分区间内的每一点和坐标系原点(特征点)的角度θ的余弦值cosθ,按其值保存在直方图中。
基于特征值的描述子
计算特征点周围的k邻近点构建了协方差矩阵M,对M进行特征分解,利用特征值计算

将点分为:线状、面状、球状分布三类
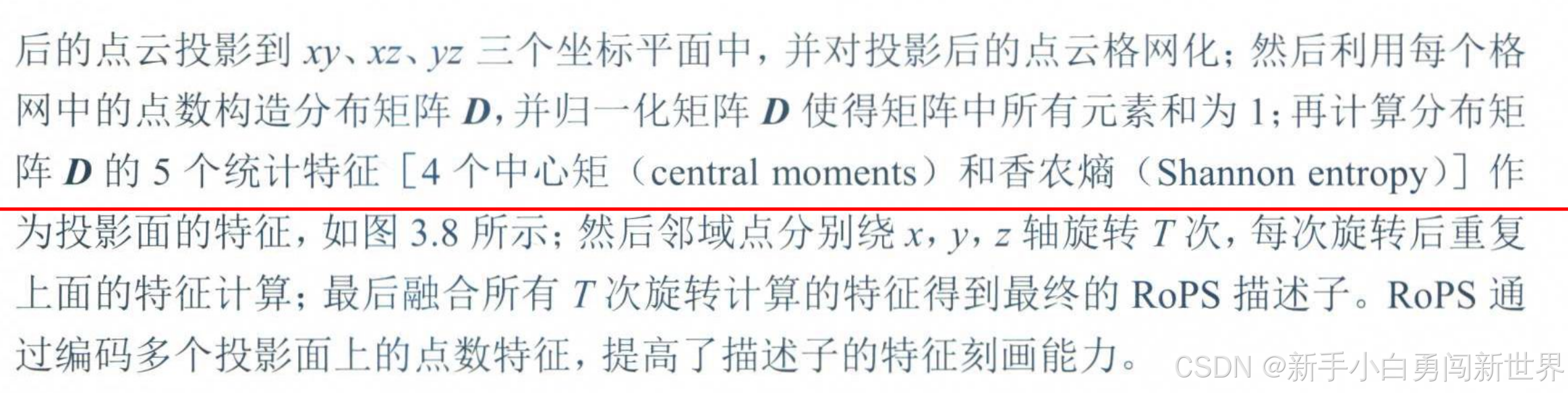
RoPS旋转投影统计特征:
通过将一个特征点的邻点旋转投影到二维平面上,并计算投影点分布的一组统计量(包括低阶中心矩和熵)来获得的,利用SHOT方法构建局部坐标系,将邻域点投影到三个坐标平面,
【PCL自学:Feature8】RoPs(旋转投影统计)特征识别物体简介和使用 (持续更新)_rops定义lrf-CSDN博客
StriSI
TOLDI