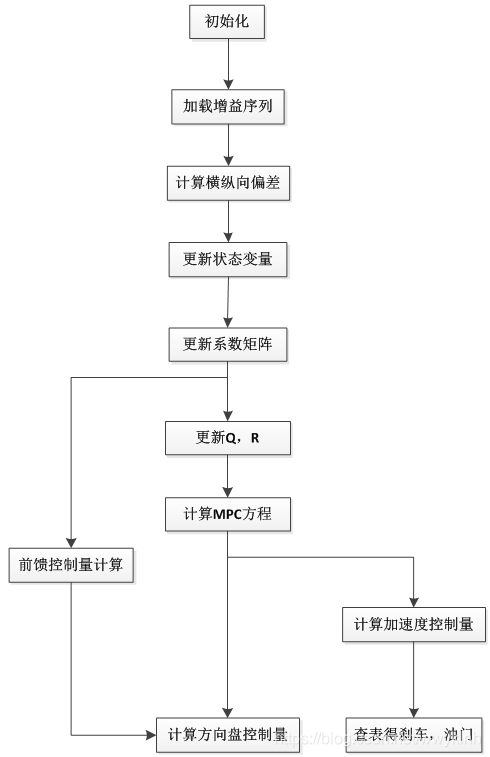
1 流程图
2代码分析
以下内容对代码进行分析:
以下代码是加载MPC控制的相关配置参数;
bool MPCController::LoadControlConf(const ControlConf *control_conf) {
if (!control_conf) {
AERROR << "[MPCController] control_conf = nullptr";
return false;
}
vehicle_param_ = VehicleConfigHelper::Instance()->GetConfig().vehicle_param();
ts_ = control_conf->mpc_controller_conf().ts();
CHECK_GT(ts_, 0.0) << "[MPCController] Invalid control update interval.";
cf_ = control_conf->mpc_controller_conf().cf();
cr_ = control_conf->mpc_controller_conf().cr();
wheelbase_ = vehicle_param_.wheel_base();
steer_ratio_ = vehicle_param_.steer_ratio();
steer_single_direction_max_degree_ =
vehicle_param_.max_steer_angle() * 180 / M_PI;
max_lat_acc_ = control_conf->mpc_controller_conf().max_lateral_acceleration();
wheel_single_direction_max_degree_ =
steer_single_direction_max_degree_ / steer_ratio_ / 180 * M_PI;
max_acceleration_ = vehicle_param_.max_acceleration();
max_deceleration_ = vehicle_param_.max_deceleration();
const double mass_fl = control_conf->mpc_controller_conf().mass_fl();
const double mass_fr = control_conf->mpc_controller_conf().mass_fr();
const double mass_rl = control_conf->mpc_controller_conf().mass_rl();
const double mass_rr = control_conf->mpc_controller_conf().mass_rr();
const double mass_front = mass_fl + mass_fr;
const double mass_rear = mass_rl + mass_rr;
mass_ = mass_front + mass_rear;
lf_ = wheelbase_ * (1.0 - mass_front / mass_);
lr_ = wheelbase_ * (1.0 - mass_rear / mass_);
iz_ = lf_ * lf_ * mass_front + lr_ * lr_ * mass_rear;
mpc_eps_ = control_conf->mpc_controller_conf().eps();
mpc_max_iteration_ = control_conf->mpc_controller_conf().max_iteration();
throttle_lowerbound_ =
std::max(vehicle_param_.throttle_deadzone(),
control_conf->mpc_controller_conf().throttle_minimum_action());
brake_lowerbound_ =
std::max(vehicle_param_.brake_deadzone(),
control_conf->mpc_controller_conf().brake_minimum_action());
minimum_speed_protection_ = control_conf->minimum_speed_protection();
max_acceleration_when_stopped_ =
control_conf->max_acceleration_when_stopped();
max_abs_speed_when_stopped_ = vehicle_param_.max_abs_speed_when_stopped();
standstill_acceleration_ =
control_conf->mpc_controller_conf().standstill_acceleration();
enable_mpc_feedforward_compensation_ =
control_conf->mpc_controller_conf().enable_mpc_feedforward_compensation();
unconstraint_control_diff_limit_ =
control_conf->mpc_controller_conf().unconstraint_control_diff_limit();
LoadControlCalibrationTable(control_conf->mpc_controller_conf());
AINFO << "MPC conf loaded";
return true;
}
以下代码是对MPC控制器进行初始化,包括矩阵A,矩阵B,矩阵C,矩阵K,矩阵R,矩阵Q,加载MPC增益调度序列,初始化滤波器,
Status MPCController::Init(const ControlConf *control_conf) {
if (!LoadControlConf(control_conf)) {
AERROR << "failed to load control conf";
return Status(ErrorCode::CONTROL_COMPUTE_ERROR,
"failed to load control_conf");
}
// Matrix init operations.
matrix_a_ = Matrix::Zero(basic_state_size_, basic_state_size_);
matrix_ad_ = Matrix::Zero(basic_state_size_, basic_state_size_);
matrix_a_(0, 1) = 1.0;
matrix_a_(1, 2) = (cf_ + cr_) / mass_;
matrix_a_(2, 3) = 1.0;
matrix_a_(3, 2) = (lf_ * cf_ - lr_ * cr_) / iz_;
matrix_a_(4, 5) = 1.0;
matrix_a_(5, 5) = 0.0;
// TODO(QiL): expand the model to accommodate more combined states.
matrix_a_coeff_ = Matrix::Zero(basic_state_size_, basic_state_size_);
matrix_a_coeff_(1, 1) = -(cf_ + cr_) / mass_;
matrix_a_coeff_(1, 3) = (lr_ * cr_ - lf_ * cf_) / mass_;
matrix_a_coeff_(2, 3) = 1.0;
matrix_a_coeff_(3, 1) = (lr_ * cr_ - lf_ * cf_) / iz_;
matrix_a_coeff_(3, 3) = -1.0 * (lf_ * lf_ * cf_ + lr_ * lr_ * cr_) / iz_;
matrix_b_ = Matrix::Zero(basic_state_size_, controls_);
matrix_bd_ = Matrix::Zero(basic_state_size_, controls_);
matrix_b_(1, 0) = cf_ / mass_;
matrix_b_(3, 0) = lf_ * cf_ / iz_;
matrix_b_(4, 1) = 0.0;
matrix_b_(5, 1) = -1.0;
matrix_bd_ = matrix_b_ * ts_;
matrix_c_ = Matrix::Zero(basic_state_size_, 1);
matrix_c_(5, 0) = 1.0;
matrix_cd_ = Matrix::Zero(basic_state_size_, 1);
matrix_state_ = Matrix::Zero(basic_state_size_, 1);
matrix_k_ = Matrix::Zero(1, basic_state_size_);
matrix_r_ = Matrix::Identity(controls_, controls_);
matrix_q_ = Matrix::Zero(basic_state_size_, basic_state_size_);
int r_param_size = control_conf->mpc_controller_conf().matrix_r_size();
for (int i = 0; i < r_param_size; ++i) {
matrix_r_(i, i) = control_conf->mpc_controller_conf().matrix_r(i);
}
int q_param_size = control_conf->mpc_controller_conf().matrix_q_size();
if (basic_state_size_ != q_param_size) {
const auto error_msg = common::util::StrCat(
"MPC controller error: matrix_q size: ", q_param_size,
" in parameter file not equal to basic_state_size_: ",
basic_state_size_);
AERROR << error_msg;
return Status(ErrorCode::CONTROL_COMPUTE_ERROR, error_msg);
}
for (int i = 0; i < q_param_size; ++i) {
matrix_q_(i, i) = control_conf->mpc_controller_conf().matrix_q(i);
}
// Update matrix_q_updated_ and matrix_r_updated_
matrix_r_updated_ = matrix_r_;
matrix_q_updated_ = matrix_q_;
InitializeFilters(control_conf);
LoadMPCGainScheduler(control_conf->mpc_controller_conf());
LogInitParameters();
AINFO << "[MPCController] init done!";
return Status::OK();
}
下列代码就是加载MPC增益序列,具体有以下序列:
1,横向偏差增益序列;
2,航向偏差增益序列;
3,前馈项增益序列;
4,转向加权增益序列;
void MPCController::LoadMPCGainScheduler(
const MPCControllerConf &mpc_controller_conf) {
const auto &lat_err_gain_scheduler =
mpc_controller_conf.lat_err_gain_scheduler();
const auto &heading_err_gain_scheduler =
mpc_controller_conf.heading_err_gain_scheduler();
const auto &feedforwardterm_gain_scheduler =
mpc_controller_conf.feedforwardterm_gain_scheduler();
const auto &steer_weight_gain_scheduler =
mpc_controller_conf.steer_weight_gain_scheduler();
AINFO << "MPC control gain scheduler loaded";
Interpolation1D::DataType xy1, xy2, xy3, xy4;
for (const auto &scheduler : lat_err_gain_scheduler.scheduler()) {
xy1.push_back(std::make_pair(scheduler.speed(), scheduler.ratio()));
}
for (const auto &scheduler : heading_err_gain_scheduler.scheduler()) {
xy2.push_back(std::make_pair(scheduler.speed(), scheduler.ratio()));
}
for (const auto &scheduler : feedforwardterm_gain_scheduler.scheduler()) {
xy3.push_back(std::make_pair(scheduler.speed(), scheduler.ratio()));
}
for (const auto &scheduler : steer_weight_gain_scheduler.scheduler()) {
xy4.push_back(std::make_pair(scheduler.speed(), scheduler.ratio()));
}
lat_err_interpolation_.reset(new Interpolation1D);
CHECK(lat_err_interpolation_->Init(xy1))
<< "Fail to load lateral error gain scheduler for MPC controller";
heading_err_interpolation_.reset(new Interpolation1D);
CHECK(heading_err_interpolation_->Init(xy2))
<< "Fail to load heading error gain scheduler for MPC controller";
feedforwardterm_interpolation_.reset(new Interpolation1D);
CHECK(feedforwardterm_interpolation_->Init(xy2))
<< "Fail to load feed forward term gain scheduler for MPC controller";
steer_weight_interpolation_.reset(new Interpolation1D);
CHECK(steer_weight_interpolation_->Init(xy2))
<< "Fail to load steer weight gain scheduler for MPC controller";
}
以下代码为计算控制命令,
输入:当前车辆状态,目标轨迹
输出:方向盘转向角度,油门,制动
Status MPCController::ComputeControlCommand(
const localization::LocalizationEstimate *localization,
const canbus::Chassis *chassis,
const planning::ADCTrajectory *planning_published_trajectory,
ControlCommand *cmd) {
trajectory_analyzer_ =
std::move(TrajectoryAnalyzer(planning_published_trajectory));
SimpleMPCDebug *debug = cmd->mutable_debug()->mutable_simple_mpc_debug();
debug->Clear();
计算纵向偏差,实现如下所示:
ComputeLongitudinalErrors(&trajectory_analyzer_, debug);
计算纵向偏差。
1,首先求得一个matched_point,求取的具体方法可参考纵向控制。
2,然后 求得车辆当前位置到matched_point点的横向偏差,横向车速,纵向偏差,纵向车速。
3,求得reference_point,该点是时间距离当前车辆时间点最近的规划点。
4,计算航向角偏差,即当前车辆航向角和matched_point点的航向角差值。
5,计算车辆到matched_point的纵向车速偏差和纵向加速度偏差以及到reference_point的曲率变化;
6,设置各种偏差值,后面会用到;
void MPCController::ComputeLongitudinalErrors(
const TrajectoryAnalyzer *trajectory_analyzer, SimpleMPCDebug *debug) {
// the decomposed vehicle motion onto Frenet frame
// s: longitudinal accumulated distance along reference trajectory
// s_dot: longitudinal velocity along reference trajectory
// d: lateral distance w.r.t. reference trajectory
// d_dot: lateral distance change rate, i.e. dd/dt
double s_matched = 0.0;
double s_dot_matched = 0.0;
double d_matched = 0.0;
double d_dot_matched = 0.0;
const auto matched_point = trajectory_analyzer->QueryMatchedPathPoint(
VehicleStateProvider::Instance()->x(),
VehicleStateProvider::Instance()->y());
trajectory_analyzer->ToTrajectoryFrame(
VehicleStateProvider::Instance()->x(),
VehicleStateProvider::Instance()->y(),
VehicleStateProvider::Instance()->heading(),
VehicleStateProvider::Instance()->linear_velocity(), matched_point,
&s_matched, &s_dot_matched, &d_matched, &d_dot_matched);
const double current_control_time = Clock::NowInSeconds();
TrajectoryPoint reference_point =
trajectory_analyzer->QueryNearestPointByAbsoluteTime(
current_control_time);
ADEBUG << "matched point:" << matched_point.DebugString();
ADEBUG << "reference point:" << reference_point.DebugString();
const double linear_v = VehicleStateProvider::Instance()->linear_velocity();
const double linear_a =
VehicleStateProvider::Instance()->linear_acceleration();
double heading_error = common::math::NormalizeAngle(
VehicleStateProvider::Instance()->heading() - matched_point.theta());
double lon_speed = linear_v * std::cos(heading_error);
double lon_acceleration = linear_a * std::cos(heading_error);
double one_minus_kappa_lat_error = 1 - reference_point.path_point().kappa() *
linear_v * std::sin(heading_error);
debug->set_station_reference(reference_point.path_point().s());
debug->set_station_feedback(s_matched);
debug->set_station_error(reference_point.path_point().s() - s_matched);
debug->set_speed_reference(reference_point.v());
debug->set_speed_feedback(lon_speed);
debug->set_speed_error(reference_point.v() - s_dot_matched);
debug->set_acceleration_reference(reference_point.a());
debug->set_acceleration_feedback(lon_acceleration);
debug->set_acceleration_error(reference_point.a() -
lon_acceleration / one_minus_kappa_lat_error);
double jerk_reference =
(debug->acceleration_reference() - previous_acceleration_reference_) /
ts_;
double lon_jerk =
(debug->acceleration_feedback() - previous_acceleration_) / ts_;
debug->set_jerk_reference(jerk_reference);
debug->set_jerk_feedback(lon_jerk);
debug->set_jerk_error(jerk_reference - lon_jerk / one_minus_kappa_lat_error);
previous_acceleration_reference_ = debug->acceleration_reference();
previous_acceleration_ = debug->acceleration_feedback();
}
更新状态变量;
// Update state
UpdateState(debug);
更新状态变量的具体代码如下:
首先计算车辆横向偏差,然后设置系统的状态参数如下:
1,横向偏差:当前车辆位置到距离车辆最近轨迹点(追踪点)的横向偏差。
2,横向偏差变化率:线车速与(当前车辆航向角-最近轨迹点航向角)的正弦。
3,航向角偏差:当前车辆航向角-最近轨迹点航向角。
4,航向角偏差变化率:当前车辆角速度-追踪点曲率*追踪点线车速(即追踪点的角速度)。
5,位置偏差:当前车辆到纵向偏差计算中的reference_point走过的距离-当前车辆到纵向matched_point的纵向距离。
6,速度偏差:reference_point的车速-纵向matched_point中的纵向车速。
void MPCController::UpdateState(SimpleMPCDebug *debug) {
const auto &com = VehicleStateProvider::Instance()->ComputeCOMPosition(lr_);
ComputeLateralErrors(com.x(), com.y(),
VehicleStateProvider::Instance()->heading(),
VehicleStateProvider::Instance()->linear_velocity(),
VehicleStateProvider::Instance()->angular_velocity(),
VehicleStateProvider::Instance()->linear_acceleration(),
trajectory_analyzer_, debug);
// State matrix update;
matrix_state_(0, 0) = debug->lateral_error();
matrix_state_(1, 0) = debug->lateral_error_rate();
matrix_state_(2, 0) = debug->heading_error();
matrix_state_(3, 0) = debug->heading_error_rate();
matrix_state_(4, 0) = debug->station_error();
matrix_state_(5, 0) = debug->speed_error();
}
横向偏差计算的具体实现如下:
1,首先计算距离车辆最近的轨迹点matched_point,这个点和纵向控制中的matched_point不一样;
2,计算车辆当前位置到横向matched_point的横向偏差,航向角偏差,横向车速偏差,横向加速度偏差。
void MPCController::ComputeLateralErrors(
const double x, const double y, const double theta, const double linear_v,
const double angular_v, const double linear_a,
const TrajectoryAnalyzer &trajectory_analyzer, SimpleMPCDebug *debug) {
const auto matched_point =
trajectory_analyzer.QueryNearestPointByPosition(x, y);
const double dx = x - matched_point.path_point().x();
const double dy = y - matched_point.path_point().y();
const double cos_matched_theta = std::cos(matched_point.path_point().theta());
const double sin_matched_theta = std::sin(matched_point.path_point().theta());
// d_error = cos_matched_theta * dy - sin_matched_theta * dx;
debug->set_lateral_error(cos_matched_theta * dy - sin_matched_theta * dx);
// matched_theta = matched_point.path_point().theta();
debug->set_ref_heading(matched_point.path_point().theta());
const double delta_theta =
common::math::NormalizeAngle(theta - debug->ref_heading());
debug->set_heading_error(delta_theta);
const double sin_delta_theta = std::sin(delta_theta);
// d_error_dot = chassis_v * sin_delta_theta;
double lateral_error_dot = linear_v * sin_delta_theta;
double lateral_error_dot_dot = linear_a * sin_delta_theta;
if (FLAGS_reverse_heading_control) {
if (VehicleStateProvider::Instance()->gear() ==
canbus::Chassis::GEAR_REVERSE) {
lateral_error_dot = -lateral_error_dot;
lateral_error_dot_dot = -lateral_error_dot_dot;
}
}
debug->set_lateral_error_rate(lateral_error_dot);
debug->set_lateral_acceleration(lateral_error_dot_dot);
debug->set_lateral_jerk(
(debug->lateral_acceleration() - previous_lateral_acceleration_) / ts_);
previous_lateral_acceleration_ = debug->lateral_acceleration();
// matched_kappa = matched_point.path_point().kappa();
debug->set_curvature(matched_point.path_point().kappa());
// theta_error = delta_theta;
debug->set_heading_error(delta_theta);
// theta_error_dot = angular_v - matched_point.path_point().kappa() *
// matched_point.v();
debug->set_heading_rate(angular_v);
debug->set_ref_heading_rate(debug->curvature() * matched_point.v());
debug->set_heading_error_rate(debug->heading_rate() -
debug->ref_heading_rate());
debug->set_heading_acceleration(
(debug->heading_rate() - previous_heading_rate_) / ts_);
debug->set_ref_heading_acceleration(
(debug->ref_heading_rate() - previous_ref_heading_rate_) / ts_);
debug->set_heading_error_acceleration(debug->heading_acceleration() -
debug->ref_heading_acceleration());
previous_heading_rate_ = debug->heading_rate();
previous_ref_heading_rate_ = debug->ref_heading_rate();
debug->set_heading_jerk(
(debug->heading_acceleration() - previous_heading_acceleration_) / ts_);
debug->set_ref_heading_jerk(
(debug->ref_heading_acceleration() - previous_ref_heading_acceleration_) /
ts_);
debug->set_heading_error_jerk(debug->heading_jerk() -
debug->ref_heading_jerk());
previous_heading_acceleration_ = debug->heading_acceleration();
previous_ref_heading_acceleration_ = debug->ref_heading_acceleration();
}
更新系数矩阵
UpdateMatrix(debug);
更新系数矩阵的具体代码实现如下:
更新矩阵A,并采用双线性变换离散法进行离散化处理;
更新矩阵C,并将其离散化处理;
void MPCController::UpdateMatrix(SimpleMPCDebug *debug) {
const double v = std::max(VehicleStateProvider::Instance()->linear_velocity(),
minimum_speed_protection_);
matrix_a_(1, 1) = matrix_a_coeff_(1, 1) / v;
matrix_a_(1, 3) = matrix_a_coeff_(1, 3) / v;
matrix_a_(3, 1) = matrix_a_coeff_(3, 1) / v;
matrix_a_(3, 3) = matrix_a_coeff_(3, 3) / v;
Matrix matrix_i = Matrix::Identity(matrix_a_.cols(), matrix_a_.cols());
matrix_ad_ = (matrix_i - ts_ * 0.5 * matrix_a_).inverse() *
(matrix_i + ts_ * 0.5 * matrix_a_);
matrix_c_(1, 0) = (lr_ * cr_ - lf_ * cf_) / mass_ / v - v;
matrix_c_(3, 0) = -(lf_ * lf_ * cf_ + lr_ * lr_ * cr_) / iz_ / v;
matrix_cd_ = matrix_c_ * debug->heading_error_rate() * ts_;
}
计算前馈控制量,
FeedforwardUpdate(debug);
具体代码实现如下:首先计算前轮转角,然后将前轮转角转换成方向盘转角转动百分比。
void MPCController::FeedforwardUpdate(SimpleMPCDebug *debug) {
const double v = VehicleStateProvider::Instance()->linear_velocity();
const double kv =
lr_ * mass_ / 2 / cf_ / wheelbase_ - lf_ * mass_ / 2 / cr_ / wheelbase_;
steer_angle_feedforwardterm_ = Wheel2SteerPct(
wheelbase_ * debug->curvature() + kv * v * v * debug->curvature());
}
如果需要增加对于高速转向的增益序列,则需要将Q,R矩阵的相应参数乘以车速。
并更新Q,R矩阵。
// Add gain scheduler for higher speed steering
if (FLAGS_enable_gain_scheduler) {
matrix_q_updated_(0, 0) =
matrix_q_(0, 0) *
lat_err_interpolation_->Interpolate(
VehicleStateProvider::Instance()->linear_velocity());
matrix_q_updated_(2, 2) =
matrix_q_(2, 2) *
heading_err_interpolation_->Interpolate(
VehicleStateProvider::Instance()->linear_velocity());
steer_angle_feedforwardterm_updated_ =
steer_angle_feedforwardterm_ *
feedforwardterm_interpolation_->Interpolate(
VehicleStateProvider::Instance()->linear_velocity());
matrix_r_updated_(0, 0) =
matrix_r_(0, 0) *
steer_weight_interpolation_->Interpolate(
VehicleStateProvider::Instance()->linear_velocity());
} else {
matrix_q_updated_ = matrix_q_;
matrix_r_updated_ = matrix_r_;
steer_angle_feedforwardterm_updated_ = steer_angle_feedforwardterm_;
}
debug->add_matrix_q_updated(matrix_q_updated_(0, 0));
debug->add_matrix_q_updated(matrix_q_updated_(1, 1));
debug->add_matrix_q_updated(matrix_q_updated_(2, 2));
debug->add_matrix_q_updated(matrix_q_updated_(3, 3));
debug->add_matrix_r_updated(matrix_r_updated_(0, 0));
debug->add_matrix_r_updated(matrix_r_updated_(1, 1));
设置以下矩阵:
预测时序,参考时序等。
Matrix control_matrix = Matrix::Zero(controls_, 1);
std::vector<Matrix> control(horizon_, control_matrix);
Matrix control_gain_matrix = Matrix::Zero(controls_, basic_state_size_);
std::vector<Matrix> control_gain(horizon_, control_gain_matrix);
Matrix addition_gain_matrix = Matrix::Zero(controls_, 1);
std::vector<Matrix> addition_gain(horizon_, addition_gain_matrix);
Matrix reference_state = Matrix::Zero(basic_state_size_, 1);
std::vector<Matrix> reference(horizon_, reference_state);
Matrix lower_bound(controls_, 1);
lower_bound << -wheel_single_direction_max_degree_, max_deceleration_;
Matrix upper_bound(controls_, 1);
upper_bound << wheel_single_direction_max_degree_, max_acceleration_;
之后为解MPC控制方程。
MPC控制器解法和论文《Model Predictive Control of a Mobile Robot Using Linearization》(Walter Fetter Lages etc.)一致。在这里就不展开说明了,后续会详细分析。
double mpc_start_timestamp = Clock::NowInSeconds();
double steer_angle_feedback = 0.0;
double acc_feedback = 0.0;
double steer_angle_ff_compensation = 0.0;
double unconstraint_control_diff = 0.0;
double control_gain_truncation_ratio = 0.0;
double unconstraint_control = 0.0;
const double v = VehicleStateProvider::Instance()->linear_velocity();
if (!common::math::SolveLinearMPC(matrix_ad_, matrix_bd_, matrix_cd_,
matrix_q_updated_, matrix_r_updated_,
lower_bound, upper_bound, matrix_state_,
reference, mpc_eps_, mpc_max_iteration_,
&control, &control_gain, &addition_gain)) {
AERROR << "MPC solver failed";
}
MPC算法求得两个最优值:车轮转角,加速度。
之将车轮转角转换成方向盘转角。
求出控制量的约束值。
else {
ADEBUG << "MPC problem solved! ";
steer_angle_feedback = Wheel2SteerPct(control[0](0, 0));
acc_feedback = control[0](1, 0);
for (int i = 0; i < basic_state_size_; ++i) {
unconstraint_control += control_gain[0](0, i) * matrix_state_(i, 0);
}
unconstraint_control += addition_gain[0](0, 0) * v * debug->curvature();
如果允许对MPC控制进行前馈补偿,则不受约束的控制量差值=正常控制量-约束控制量,如果该差值小于差值限制值,则计算方向盘转角补偿量。否则补偿量等于0。
if (enable_mpc_feedforward_compensation_) {
unconstraint_control_diff =
Wheel2SteerPct(control[0](0, 0) - unconstraint_control);
if (fabs(unconstraint_control_diff) <= unconstraint_control_diff_limit_) {
steer_angle_ff_compensation =
Wheel2SteerPct(debug->curvature() *
(control_gain[0](0, 2) *
(lr_ - lf_ / cr_ * mass_ * v * v / wheelbase_) -
addition_gain[0](0, 0) * v));
} else {
control_gain_truncation_ratio = control[0](0, 0) / unconstraint_control;
steer_angle_ff_compensation =
Wheel2SteerPct(debug->curvature() *
(control_gain[0](0, 2) *
(lr_ - lf_ / cr_ * mass_ * v * v / wheelbase_) -
addition_gain[0](0, 0) * v) *
control_gain_truncation_ratio);
}
} else {
steer_angle_ff_compensation = 0.0;
}
}
double mpc_end_timestamp = Clock::NowInSeconds();
ADEBUG << "MPC core algorithm: calculation time is: "
<< (mpc_end_timestamp - mpc_start_timestamp) * 1000 << " ms.";
方向盘转角=MPC计算的方向盘转角+大车速下的方向盘转角增加量+方向盘转角补偿量。
// TODO(QiL): evaluate whether need to add spline smoothing after the result
double steer_angle = steer_angle_feedback +
steer_angle_feedforwardterm_updated_ +
steer_angle_ff_compensation;
如果允许设置方向盘转角限制值,则限制值为最大纵向加速度*轴距/速度平方转换成方向盘转角。
之后对其进行滤波处理。
if (FLAGS_set_steer_limit) {
const double steer_limit =
std::atan(max_lat_acc_ * wheelbase_ /
(VehicleStateProvider::Instance()->linear_velocity() *
VehicleStateProvider::Instance()->linear_velocity())) *
steer_ratio_ * 180 / M_PI / steer_single_direction_max_degree_ * 100;
// Clamp the steer angle with steer limitations at current speed
double steer_angle_limited =
common::math::Clamp(steer_angle, -steer_limit, steer_limit);
steer_angle_limited = digital_filter_.Filter(steer_angle_limited);
steer_angle = steer_angle_limited;
debug->set_steer_angle_limited(steer_angle_limited);
}
steer_angle = digital_filter_.Filter(steer_angle);
// Clamp the steer angle to -100.0 to 100.0
steer_angle = common::math::Clamp(steer_angle, -100.0, 100.0);
设置方向盘转动角度。
cmd->set_steering_target(steer_angle);
加速命令=MPC求出的加速反馈+reference_point点的加速度;
debug->set_acceleration_cmd_closeloop(acc_feedback);
double acceleration_cmd = acc_feedback + debug->acceleration_reference();
// TODO(QiL): add pitch angle feed forward to accommodate for 3D control
如果满足停车条件,则加速度为最大停车加速度。
if ((planning_published_trajectory->trajectory_type() ==
apollo::planning::ADCTrajectory::NORMAL) &&
(std::fabs(debug->acceleration_reference()) <=
max_acceleration_when_stopped_ &&
std::fabs(debug->speed_reference()) <= max_abs_speed_when_stopped_)) {
acceleration_cmd =
(chassis->gear_location() == canbus::Chassis::GEAR_REVERSE)
? std::max(acceleration_cmd, -standstill_acceleration_)
: std::min(acceleration_cmd, standstill_acceleration_);
ADEBUG << "Stop location reached";
debug->set_is_full_stop(true);
}
// TODO(Yu): study the necessity of path_remain and add it to MPC if needed
设置加速度命令。
debug->set_acceleration_cmd(acceleration_cmd);
根据加速度命令,查找标定表得到标定值。
double calibration_value = 0.0;
if (FLAGS_use_preview_speed_for_table) {
calibration_value = control_interpolation_->Interpolate(
std::make_pair(debug->speed_reference(), acceleration_cmd));
} else {
calibration_value = control_interpolation_->Interpolate(std::make_pair(
VehicleStateProvider::Instance()->linear_velocity(), acceleration_cmd));
}
设置标定值。
根据标定值分别计算油门/刹车值。
debug->set_calibration_value(calibration_value);
double throttle_cmd = 0.0;
double brake_cmd = 0.0;
if (calibration_value >= 0) {
throttle_cmd = std::max(calibration_value, throttle_lowerbound_);
brake_cmd = 0.0;
} else {
throttle_cmd = 0.0;
brake_cmd = std::max(-calibration_value, brake_lowerbound_);
}
cmd->set_steering_rate(FLAGS_steer_angle_rate);
// if the car is driven by acceleration, disgard the cmd->throttle and brake
cmd->set_throttle(throttle_cmd);
cmd->set_brake(brake_cmd);
cmd->set_acceleration(acceleration_cmd);
debug->set_heading(VehicleStateProvider::Instance()->heading());
debug->set_steering_position(chassis->steering_percentage());
debug->set_steer_angle(steer_angle);
debug->set_steer_angle_feedforward(steer_angle_feedforwardterm_updated_);
debug->set_steer_angle_feedforward_compensation(steer_angle_ff_compensation);
debug->set_steer_unconstraint_control_diff(unconstraint_control_diff);
debug->set_steer_angle_feedback(steer_angle_feedback);
debug->set_steering_position(chassis->steering_percentage());
if (std::fabs(VehicleStateProvider::Instance()->linear_velocity()) <=
vehicle_param_.max_abs_speed_when_stopped() ||
chassis->gear_location() == planning_published_trajectory->gear() ||
chassis->gear_location() == canbus::Chassis::GEAR_NEUTRAL) {
cmd->set_gear_location(planning_published_trajectory->gear());
} else {
cmd->set_gear_location(chassis->gear_location());
}
ProcessLogs(debug, chassis);
return Status::OK();
}