首先给大家分享一个巨牛巨牛的人工智能教程,是我无意中发现的。教程不仅零基础,通俗易懂,而且非常风趣幽默,还时不时有内涵段子,像看小说一样,哈哈~我正在学习中,觉得太牛了,所以分享给大家!点这里可以跳转到教程
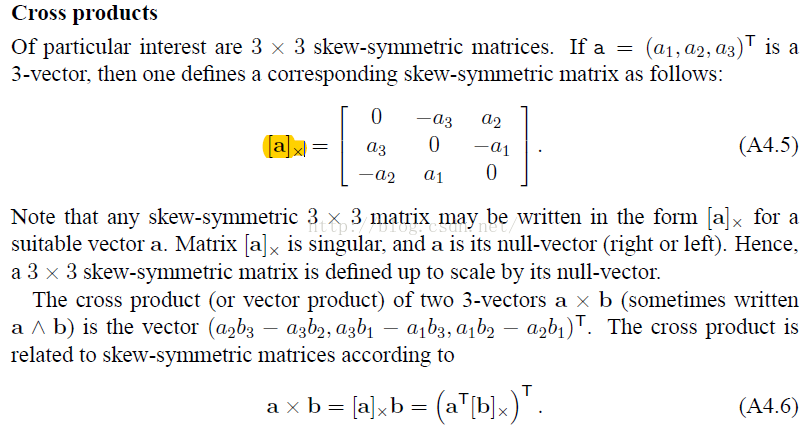
1. 叉乘
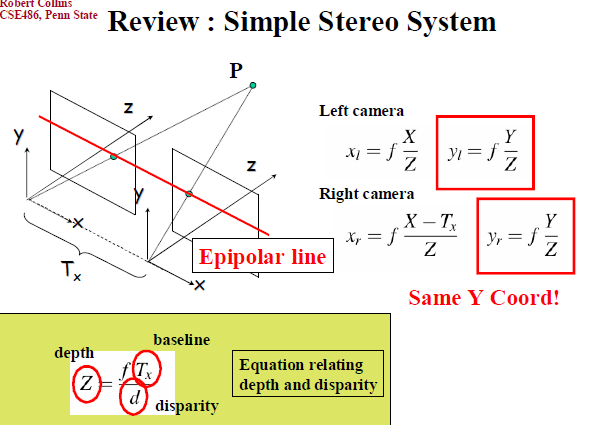
2. 双目系统
3. 对极几何 (Epipolar Geometry)
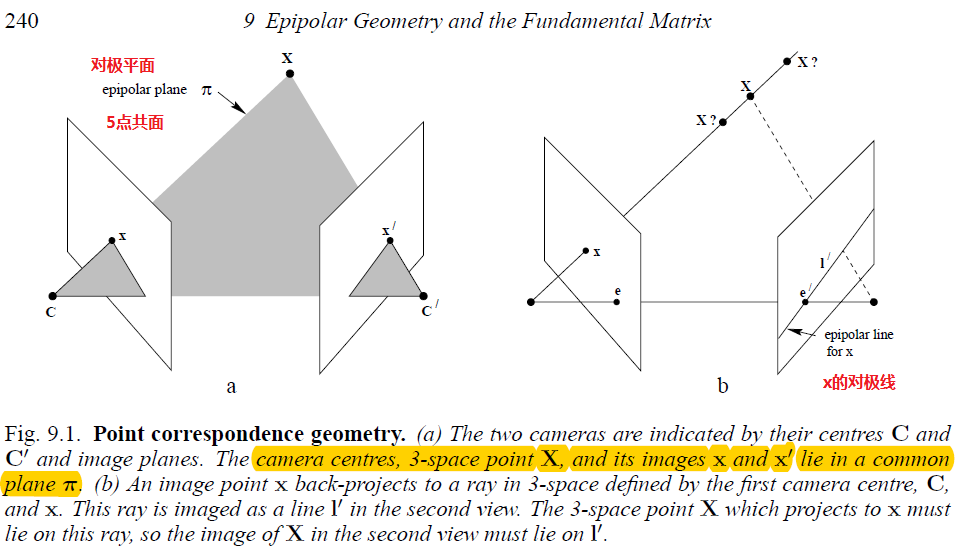
对极几何定义:是两个视图间的内部射影几何,它只与摄像机的内部参数和相对位姿有关,与场景结构无关。
基线(baseline):连接两个摄像机光心的线。
两个视图的对极几何的本质:描述图像平面与一个平面(以基线为旋转轴的平面)的交叉几何关系。
用途(对极约束:Epipolar Constraint):在双目匹配中,给定左图的一个点,不必在整个右图中搜索对应的点。“对极约束”把搜索空间缩减到一条线。
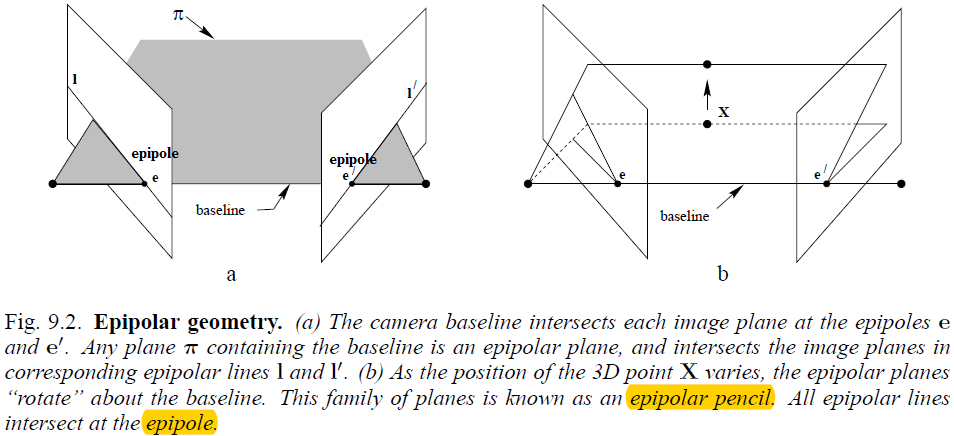
极点(Epipole):基线与图像平面的交叉点。即左图的极点:是左摄像机看到右摄像机所在的位置;右图的极点:是右摄像机看到左摄像机所在的位置。
对极平面(Epipolar Plane):包含